蝗虫飞行器建模与控制-SQ-对后续建模与规划过程很有用
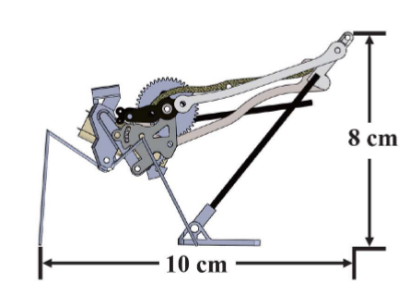
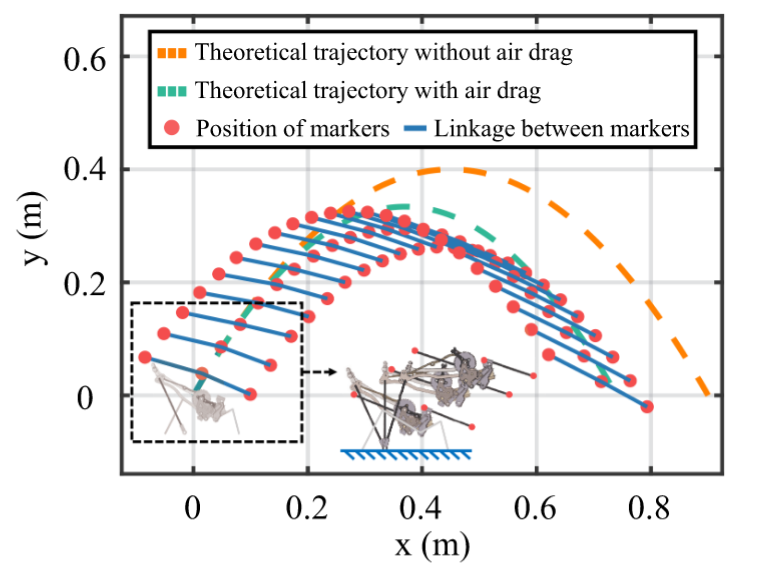
飞行器的特点:体长10 cm,质量60 g,优点是跳得高、跳的远,且在跳跃过程中具有稳定性“which allows it to maintain a proper aerial orientation without flipping.”
Paper1: Design and Optimization of a Miniature Locust-Inspired Stable Jumping Robot
引言的逐步聚焦,可以学习:
DYNAMIC locomotion in complex, diverse environments has been a grand challenge in the field of miniature robotics. The locomotion of miniature robotics is usually limited to overcoming obstacles similar in size to the robot’s body [1]. This phenomenon is also found in miniature animals and is known as the size–grain hypothesis; i.e., the roughness of the environment increases with decreasing body size, thus increasing the cost of locomotion [2].(先讲瞄准的一种现象或者困境)
To solve this problem, small animals, especially insects, have evolved two types of strategic locomotion, namely jumping and flying, to move efficiently across scales. In particular, jumping allows animals to move rapidly with less energy expenditure [3] and serves as a mechanism for animals to overcome obstacles, escape from predators, and capture prey. As an example, the locust adopts slow energy storage and a quick release to amplify power [4] and thus quickly jump to a safe region.(讲自然界生物克服困境的方法,选择一个,进一步聚焦到你关注的生物对象)
然而由于对地面反作用力(GRF)方向的控制能力有限,且地面反作用力作用线与跳跃者质心(CoM)之间存在偏差,导致跳跃过程中出现严重的翻转现象,进而造成落地姿态不可预测、不可控,也不可重复。(接下来,就是讲在我们想研究的方面,已经有过的进展。讲他们还存在的一些空白。可以进一步介绍,在这方面有人又进行了一些探索。)
为了实现可重复的跳跃,也有研究者提供过一些方案,但是仍有一定的缺陷:To achieve repeatable jumping, additional mechanisms, as proposed by Zhao [11] and Zhang [12], have been adopted for small-sized jumping robots to right themselves after landing, but these mechanisms make the robots heavier.
那么,本文是如何解决这一问题、增强稳定性的呢?主要贡献(The main contributions and novel aspects of this work) 设计和优化jumping leg,实现long-distance and non-flipping locomotion.
对本文,学习几方面:
1. 稳定性是如何分析的
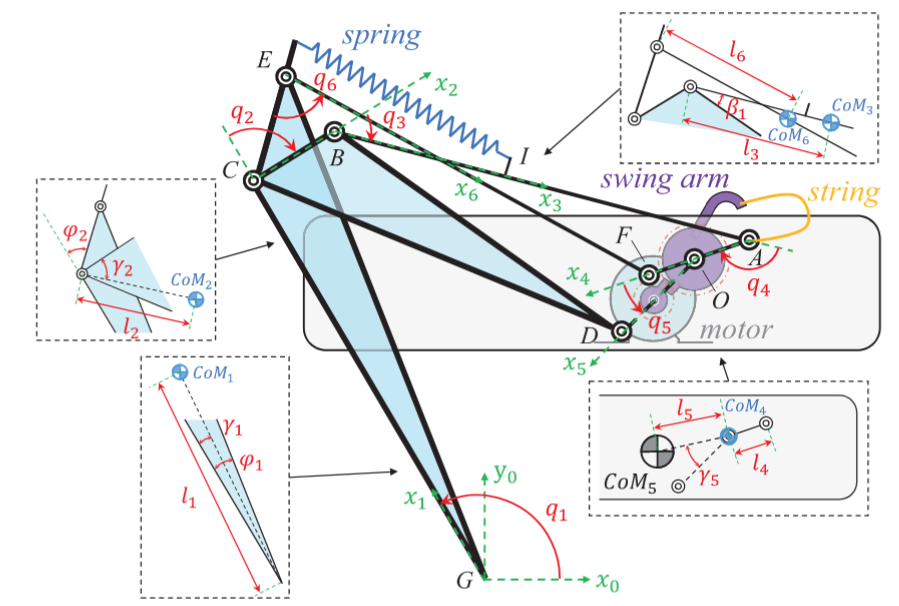
稳定性的影响因素:在实际跳跃运动中,机器人的质量特性及质心位置直接影响其跳跃稳定性。因此,我们为机器人赋予质量特性,并建立被动跳跃动力学模型。
要建立该连杆系统的模型:腿部各(三角形)连杆的质心为 CoMi,质心到前一连杆末端的距离为 li,质量为 mi,相对于质心的转动惯量为 Ii(绕垂直于纸面的 z 轴)。具体而言,机身被简化为矩形,其质心位于 CoM5。
获取各部分的动能势能,单自由度拉格朗日方程;弹射飞起来后,整体就可被当成一个刚体了
稳定性如何分析:从两个方面来探讨稳定性。1. 作用于质心的合力是否指向保持不变 2. 作用于质心的力矩,是否对COM5起到稳定性的作用。合力和力矩似乎都是惯性力。对它们期望:We want the orientation of the inertial force to be as consistent as possible, and the accumulation of the inertial moment during take-off to be as small as possible(尽可能小最好)
把这种目标提清楚是核心。如何优化都是工具。
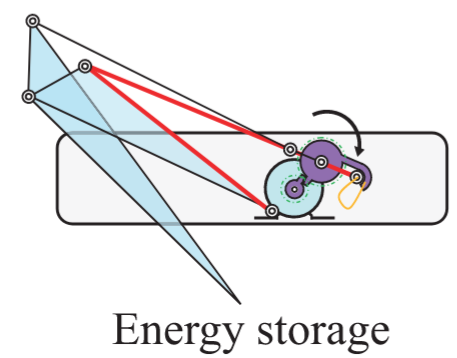
2. 机构的组成是怎样的(简单看看,知道有哪些构件即可)发现,两个啮合齿轮(单自由度,单电机驱动),有两个三角形板,其中一个板和机架构成曲柄摇杆机构,另一个板也类似,只是1个本应固定的铰链悬浮在了空中;该悬浮铰链G,就是要被弹出去的端点。相对地,该板的一个自由铰也被通过弹簧链接在了另一个板的连杆上,这个弹簧应该就是积攒能量的。初步理解:板1运动被电机完全定义,其运动会将弹簧拉伸,给板2积攒能量。拉到一个自锁死点,再反方向转,突然释放能量,弹出板2,离地跳起。
3. 如何作图,每个图的含义,是否有值得参考的地方

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 9
9 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)