基于控制论与虚拟Actor架构的智慧码头多智能体调度系统
摘要:
本文提出并阐述了一种深度融合控制论思想、知识图谱、时空数据大模型与多智能体技术的下一代智慧码头调度系统架构。该系统以控制论的“感知-决策-执行-反馈”闭环为核心范式,构建了一个虚拟Actor模型驱动的分布式多智能体运行时环境。其核心创新在于引入了港口运营知识图谱与时空数据大模型协同工作的“双核认知引擎”,为调度决策提供兼具规则确定性与态势适应性的智能支持。全局协同智能体在此引擎驱动下进行宏观优化,垂直领域智能体(泊位、堆场、水平运输等)处理专业子问题,任务执行智能体精准驱动物理终端。本架构实现了从静态计划到动态自适应的根本转变,确保了调度决策的高效性、安全性、合规性与可解释性,为智慧港口的建设提供了系统性的解决方案。
关键词:控制论;码头调度;多智能体系统(MAS);虚拟Actor架构;知识图谱;大语言模型(LLM);数字孪生;智慧港口
1. 引言
港口作为全球贸易的枢纽,其运营效率与可靠性直接关乎供应链的稳定。传统码头调度系统严重依赖人工经验与预定义的静态规则,在面对船舶大型化、作业复杂化、环保要求严格化以及各类动态扰动(如船期延误、天气突变、设备故障)时,表现出响应迟缓、协同困难、全局优化不足等瓶颈。
控制论为解决这一复杂系统问题提供了根本性的方法论。它将港口视为一个可以通过信息反馈进行自我调节以实现多目标(如最小化在港时间、最大化资源利用率)的有机整体。这意味着调度系统必须从开环的、一次性的计划模式,转变为闭环的、持续优化的自适应模式。
近年来,人工智能技术的突破,特别是大语言模型与智能体(Agent) 范式的兴起,为构建此类自适应系统提供了强大工具。然而,通用大模型在港口这类强规则、高安全、多约束的领域存在“黑箱”风险、知识滞后与事实幻觉问题,这在高安全要求的工业场景中是难以接受的。同时,单一的、集中式的智能体难以应对港口物理与信息系统的分布式本质。
本文的创新点在于,构建了一个以控制论为理论框架,深度融合知识图谱与时空数据大模型,并运行于虚拟Actor架构上的新一代智慧码头调度系统:
-
理论基石:以控制论的反馈调节思想指导系统整体设计。
-
认知核心:创新性地提出知识图谱(表征确定性规则与关系) 与时空数据大模型(处理不确定性感知与预测) 协同的“双核引擎”,确保决策既合规可靠又灵活智能。
-
组织范式:采用分层协作的多智能体系统,模拟港口组织,实现分布式决策与协同。
-
工程实现:基于虚拟Actor模型构建智能体运行时,提供高并发、可扩展、高可用的技术底座。
本框架旨在实现一个能够持续学习、动态适应、自主协同的智慧码头调度生命体,推动港口运营从“自动化”迈向“智能化”与“自主化”。
2. 相关技术与理论基础
2.1 控制论与港口系统
控制论的核心是研究系统(无论机械、生物或社会系统)如何通过信息交换和反馈机制来维持稳定或达成目标。在港口调度这一被控系统中:
-
被控对象:由泊位、岸桥、场桥、水平运输设备、堆场、集装箱等要素构成的复杂物理系统。
-
传感器:物联网(IoT)、自动识别系统(AIS)、业务系统(TOS)、视频监控等,用于感知系统状态
y(t)(如设备位置、箱位状态、船舶ETA)。 -
控制器:本论文提出的多智能体调度系统,它计算系统当前输出
y(t)与期望目标r(t)(如计划完工时间)之间的偏差e(t) = r(t) - y(t),并据此生成控制指令u(t)(调度计划)。 -
执行器:自动化岸桥、无人导引车(IGV)、智能闸口等设备。
-
反馈回路:执行结果被传感器再次采集,形成
r(t) → e(t) → u(t) → y(t)的闭环。这使得系统能动态感知扰动(如作业延误、设备故障)导致的偏差e(t),并实时调整控制指令u(t),实现自适应优化。
2.2 知识图谱、时空数据大模型与垂直领域智能体
-
港口知识图谱:以结构化的“实体-关系-属性”三元组形式,凝练港口领域的静态知识、动态规则与约束条件。例如,它明确定义了“岸桥”、“泊位”、“集装箱”等实体及其属性,以及“可作业于”、“必须远离”、“额定负载为”等关系。它将人类专家的经验、安全规程、设备参数编码为可计算、可推理的语义网络,为决策提供可解释、可验证的逻辑基础与常识。
-
时空数据大模型:针对港口领域海量多源时序与空间数据进行预训练和微调的垂直领域大模型。它擅长处理非结构化的文本(如工单、船舶报告)、时空序列数据(AIS轨迹、设备传感器流)和进行自然语言交互,实现复杂的模式识别、短时程预测(如ETA、拥堵)和方案生成。它是系统的直觉、生成与关联能力源泉。
-
协同机制:二者通过检索增强生成(RAG) 和结果校验紧密协同,形成“双核认知”。大模型生成方案前,从知识图谱中检索相关事实、规则与案例作为上下文,确保生成内容的专业性与合规性;生成后,方案交由知识图谱的规则推理引擎进行自动逻辑校验,确保其安全性与可行性,形成了“大模型探索,知识图谱验证”的可靠决策闭环。
2.3 多智能体系统与虚拟Actor架构
-
多智能体系统:港口调度本质是一个分布式、高并发的资源约束满足与优化问题。MAS将调度职责分配给多个自主或半自主的智能体,每个智能体拥有局部视角、资源和目标,通过通信、协作、协商甚至竞争,共同实现港口全局运营目标。这高度模拟了现实中调度员、岸桥司机、堆场计划员等角色协同工作的组织模式。
-
虚拟Actor模型:是实现大规模、高并发MAS的理想计算模型与运行时。在该模型中:
-
Actor是基本单元:每个智能体被封装为一个具有唯一标识的虚拟Actor。
-
状态隔离与异步消息:每个Actor维护其私有状态,只能通过发送和接收异步消息与其他Actor交互。这种设计天然避免了共享内存和复杂的锁机制,极大地简化了高并发编程。
-
位置透明与弹性伸缩:Actor框架(如Orleans, Akka)统一管理Actor的物理位置,业务逻辑无需关心Actor实际运行在哪个服务器节点上,便于实现负载均衡和弹性伸缩。
-
内置容错:通过“监管树”机制,父Actor可以监控和管理子Actor的生命周期。当某个Actor失效时,其监管者可以快速在其地节点重启它,并从持久化的事件日志中精确恢复状态,保证了系统的韧性与高可用性。
-
3. 系统总体架构设计
本系统采用分层解耦的设计理念,自下而上分为物理执行层、数据感知层、认知增强层、智能决策层,并以虚拟Actor运行时为统一承载,如图1所示。
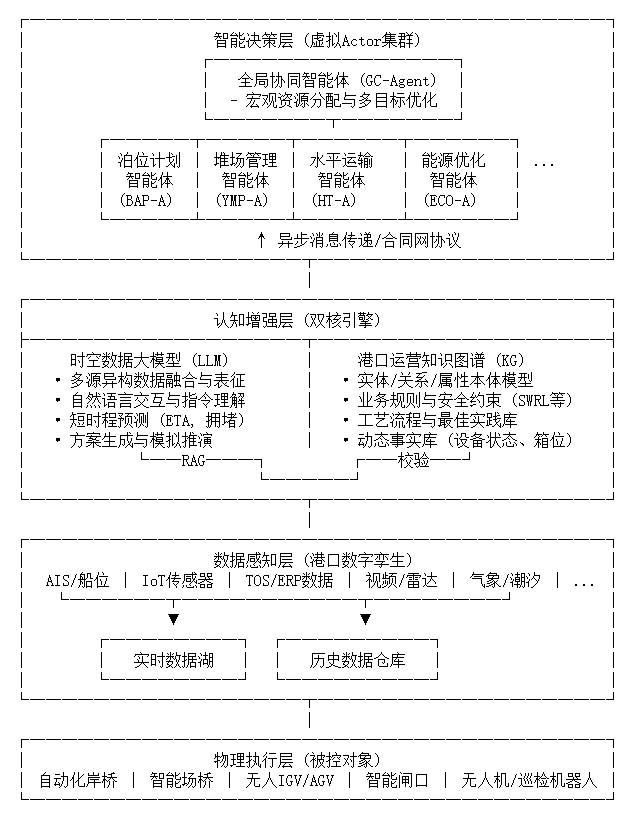
图1 系统总体架构图
(图注:展示了基于控制论闭环与虚拟Actor的多智能体码头调度系统四层架构,以及“双核认知引擎”的核心位置。)
数据流与控制流:
-
上行(感知-认知):物理层的设备状态、作业信息通过传感器网络汇入数据感知层,构建实时更新的数字孪生。认知增强层中的大模型与知识图谱持续从数字孪生中获取信息,大模型进行预测与理解,知识图谱更新动态事实(如“岸桥A当前状态忙碌”)。
-
下行(决策-执行):智能决策层的各智能体通过异步消息交互,并查询认知增强层(如“检索相关规则”、“预测未来1小时拥堵”),在虚拟Actor集群内通过合同网等协议进行协商,形成最终调度指令,下发给物理设备执行。
-
闭环反馈:设备执行结果再次被感知层捕获,形成闭环。任何偏离预期状态的偏差(如作业进度滞后、设备异常)都会作为反馈信号,触发相关智能体的重新评估与动态调整,实现系统的自适应优化。
4. 关键模块详细设计
4.1 双核认知引擎:知识图谱与大模型的协同
-
知识图谱构建与推理:
-
本体构建:使用OWL等语言定义港口核心概念体系及其关系,如
Equipment(岸桥、IGV)、Location(泊位、贝位)、Constraint(安全距离、重量限制)。 -
知识抽取与融合:从结构化数据库(TOS)、半结构化文档(安全手册、SOP)和非结构化文本(历史报告、专家纪要)中抽取实体和关系,构建大规模、可推理的知识图谱。
-
规则引擎:将业务规则形式化。例如,使用语义网规则语言(SWRL)表示:
Container(?c) ^ hasDangerousGoods(?c, ?dg) ^ DangerousGoodsClass(?dg, “Class 3”) → hasStorageZone(?c, ?z) ^ hasZoneType(?z, DangerZone)。规则引擎可自动推理出合规的存储区域。
-
-
协同工作流程:
-
面向大模型的检索增强生成(RAG):当智能体发起查询(如“为‘中远海运星云’轮推荐靠泊方案”),系统首先从知识图谱中检索该船的船长、吃水、历史作业记录、当前可用泊位及水深潮汐、关联的作业规则等,作为提示词上下文输入大模型,引导其生成专业、合规的初步方案。
-
面向决策结果的图谱校验:大模型生成的调度建议(如指令“移动集装箱CTN123456至贝位A05”)被自动转换为对知识图谱的查询。规则引擎校验此操作是否满足所有约束(如箱重、隔离、供电),返回“通过”或“不通过”及具体违反的规则链,实现决策的“白盒化”审计与安全拦截。
-
知识双向更新循环:大模型从运行日志、非结构化数据中挖掘出的新模式或关联,经低置信度筛选和人工审核后,可作为知识图谱的候选更新。同时,系统运行中发现的规则冲突或优化机会,也可反馈触发图谱的迭代,实现知识的持续进化。
-
4.2 多层级智能体设计与协作机制
各智能体被实现为虚拟Actor,拥有唯一的Actor ID、私有状态和消息邮箱,通过异步消息传递进行协作。
-
全局协同智能体:
-
职责:港口调度系统的“总指挥”。设定多目标优化函数,并基于合同网协议发布宏观任务。
-
协作机制:作为“管理者(Manager)”,发布任务公告(CFP)。接收各领域智能体的投标,基于全局优化模型(如混合整数规划)进行评标,并授予合同。
-
-
垂直领域智能体:
-
泊位计划智能体:接收船舶作业合同。利用大模型预测ETA、结合知识图谱中的泊位物理约束和业务规则,制定靠离泊和岸桥分配计划。
-
堆场管理智能体:负责堆场空间规划与场桥调度。在知识图谱的箱位属性、重量分布、危险品隔离等规则约束下,优化箱位分配,减少翻箱率。
-
水平运输智能体:管理IGV/集卡车队。接收运输任务,在数字孪生提供的实时交通地图上,为每辆车规划无冲突、能耗最优的路径,实现“车路云”协同。
-
-
任务执行智能体:
-
每个关键物理设备(如一台岸桥、一辆IGV)都可有一个对应的“数字孪生”智能体。它接收上层智能体的原子指令,将其转换为设备可执行的控制命令,并实时监控设备状态,反馈给上层。
-
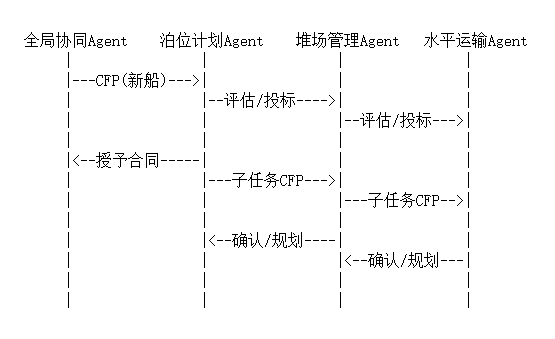
图2 智能体协作时序图(以船舶抵港为例)
(图注:展示了基于合同网协议的多智能体协作消息流,体现了分布式决策过程。)
协作流程示例(一艘船抵港):
-
GC-Agent感知到新船需求,发布CFP。
-
BAP-A、YMP-A、HT-A等智能体同时收到CFP。
-
BAP-A调用大模型和知识图谱,评估自身资源后,向GC-Agent投标:“我可在1400时为该船提供3号泊位及3台岸桥,预计完工时间1800。”
-
GC-Agent综合所有投标,授予BAP-A、YMP-A、HT-A合同。
-
BAP-A根据知识图谱中的工艺流程,将“卸船”任务分解,向YMP-A和HT-A发布子CFP(如“将100个集装箱从3号泊位运至A区”)。
-
智能体间通过异步消息不断协商、确认,直至生成可执行的完整作业链。
4.3 虚拟Actor运行时与智能体实现
-
Actor建模:每个智能体对应一个Actor类。其核心是单线程的消息处理循环,确保了内部状态的一致性。
-
运行时服务:Actor系统提供关键服务,包括地址解析(通过Actor ID路由消息)、生命周期管理、状态持久化(采用事件溯源模式)、消息传递保证(至少一次或精确一次语义)。
5. 系统实现与效益分析
5.1 应用场景:危险品集装箱全程智能调度
-
感知触发:TOS系统录入一艘载有UN 3类(易燃液体)危险品箱的船舶。感知层事件驱动全局协同智能体。
-
知识增强的任务发布:GC-Agent从知识图谱中检索由安全专家预先定义的“UN 3类危险品作业全规程”,连同任务一起发布。规程包含:需在独立区域作业、50米隔离区、配备消防设备、白天作业等。
-
智能体协同决策:
-
BAP-A:选择符合水深要求且周边有危险品应急点的泊位,计划作业时间为白天。
-
YMP-A:在知识图谱中查询符合隔离要求的空箱位,锁定目标贝位,并自动预约附近的消防栓和监控摄像头资源(通过消息通知设备管理智能体)。
-
HT-A:规划IGV路径,避开人员密集区和重要设施。
-
-
动态调整与反馈:作业中,传感器检测到风速超标。安全监控智能体(一个常驻的垂直领域智能体)从知识图谱中检索到“UN 3类危险品作业风速上限”规则,立即向GC-Agent发送告警。GC-Agent紧急协调BAP-A和YMP-A,启动应急预案,暂停作业并将危险品箱移至更安全的临时存储点(该点也由知识图谱推理推荐)。
-
知识更新:此次应急处理的全过程被记录。大模型可从中总结新的应急模式,经审核后,知识图谱可增加一条新的经验规则:“当风速超过X级且涉及UN 3类作业时,优先启动Y预案”。
5.2 预期效益与优势
-
运营效率大幅提升:通过全局实时优化和动态调整,预计船舶在港时间缩短10-20%,设备利用率提升15%以上,堆场翻箱率降低20-30% [1]。
-
安全与合规性革命性增强:知识图谱的自动规则校验将人为疏忽导致的安全事故风险降至极低,实现接近100%的调度方案预合规检查,满足日益严格的国际港口安全法规(如ISPS规则)。
-
系统韧性显著提高:虚拟Actor架构的分布式和“监管树”容错特性,使得单点故障不会导致系统瘫痪。单个智能体崩溃可被快速重启恢复,保证7x24小时不间断作业。
-
决策可解释与知识沉淀:所有决策均关联所使用的数据、知识图谱规则和大模型推理链,形成完整的审计轨迹。专家经验被持续编码进知识图谱,实现企业知识的数字化传承与自主进化。
-
降低长期成本与促进绿色运营:系统通过优化能源使用(如减少设备空驶、错峰用电)、降低人力依赖、减少事故损失,实现显著的长期运营成本节约。同时,通过路径和作业流程优化,可有效降低碳排放。
6. 结论与展望
本文将控制论的反馈调节思想、知识工程的确定性逻辑、大模型的感知预测能力以及多智能体的分布式协同优势有机结合,构建了一个基于虚拟Actor架构的智慧码头多智能体调度系统。该架构创新性地引入“知识图谱-时空数据大模型”双核认知引擎,为强规则、高动态的港口调度场景提供了兼具可靠性、智能性与自适应性的系统性解决方案。
该系统不仅解决了当前码头调度在动态响应、全局优化、安全合规等方面的核心挑战,更重要的是,它通过知识图谱与大模型的协同、以及多智能体在Actor模型下的持续交互与学习,为港口运营从“自动化”向“自主化”演进奠定了坚实的技术基础。系统中的智能体、模型与图谱均具备持续学习与改进的能力,使得整个系统能够伴随业务发展而不断成长。
未来研究方向:
-
动态知识图谱与在线学习:研究知识图谱的实时自动演化与增量推理机制,使其能从实时数据流中自动发现新规律、新关联,并通过人机协同的安全机制纳入知识体系。
-
多港口联盟与跨链智能体:将单个港口的智能体系统扩展至港口群甚至全球供应链网络,研究港口间智能体在资源竞争与合作中的博弈、协商与协同机制。
-
人在回路的混合增强智能:设计更直观、沉浸式的人机协同界面(如AR/VR),让人类专家能轻松地对智能体的决策进行监督、调整和战略指导,并将人类反馈高效融入系统优化闭环。
-
量子计算与优化算法:探索将港口调度中的NP-hard组合优化问题(如船舶配载、堆场空间规划)映射到量子计算或量子启发式算法,寻求在超大规模问题上的突破性求解速度。
总之,本文描绘的不仅是一个技术系统,更是一种新的港口运营哲学:从依赖固定规则和人工经验的机械执行,转向拥抱不确定性、具备持续学习、自我优化与自主协同能力的有机智能生态。这将是智慧港口发展的必然趋势和核心竞争力所在。
参考文献
-
Heilig, L., & Voß, S. (2016). A Cloud-Based Auction Framework for Resource Allocation in Container Terminals. Computational Logistics, 9855, 227-241.
-
Chen, L., & Li, Q. (2022). A Digital Twin- and Agent-Based Framework for Smart Port Operations. IEEE Transactions on Intelligent Transportation Systems, 23(7), 8665-8677.
-
Wiener, N. (1948). Cybernetics: Or Control and Communication in the Animal and the Machine(2nd ed.). MIT Press.
-
Wooldridge, M. (2009). An Introduction to MultiAgent Systems(2nd ed.). John Wiley & Sons.
-
Hewitt, C., Bishop, P., & Steiger, R. (1973). A Universal Modular ACTOR Form for Artificial Intelligence. In Proceedings of the 3rd International Joint Conference on Artificial Intelligence(pp. 235-245). Morgan Kaufmann.
-
Hogan, A., Blomqvist, E., Cochez, M., d'Amato, C., de Melo, G., Gutierrez, C., ... & Zimmermann, A. (2021). Knowledge Graphs. ACM Computing Surveys, 54(4), 1-37.
-
Brown, T., Mann, B., Ryder, N., Subbiah, M., Kaplan, J. D., Dhariwal, P., ... & Amodei, D. (2020). Language Models are Few-Shot Learners. Advances in Neural Information Processing Systems, 33, 1877-1901.
-
方滨兴, 贾焰, 刘奕群, 等. 人工智能大模型时代下知识图谱的机遇与挑战[J]. 中国科学: 信息科学, 2023, 53(9): 1639-1656.
-
王晓, 胡志华, 李坤. 自动化集装箱码头水平运输系统调度优化研究综述[J]. 交通运输工程学报, 2021, 21(3): 1-19.
-
相关行业报告与白皮书:山东港口青岛港、上海国际港务集团、华为《智能港口白皮书》、微软Orleans、Lightbend Akka等公开技术资料。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 9
9 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)