PID_反步控制_滑膜控制三种四旋翼无人机轨迹跟踪控制算法仿真 附带对应的说明文档
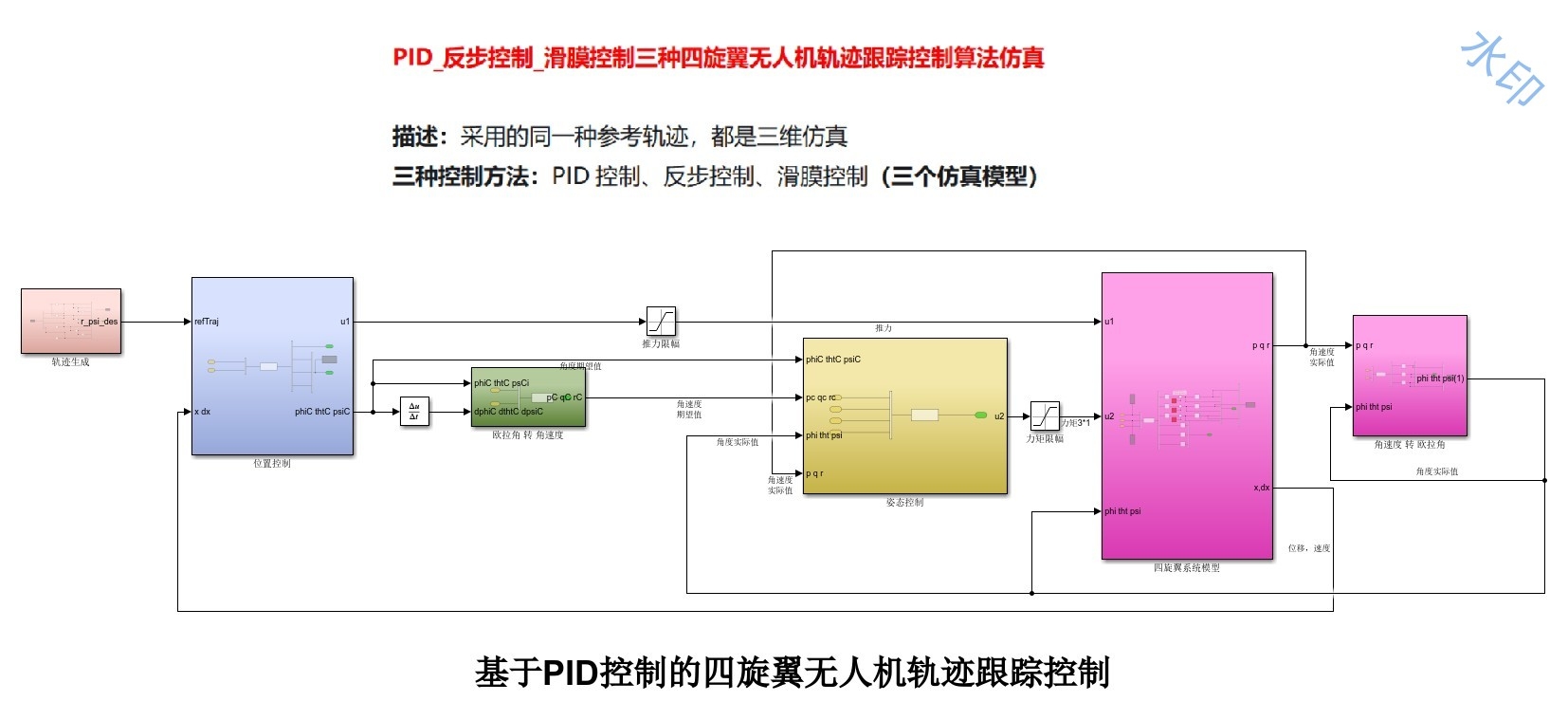
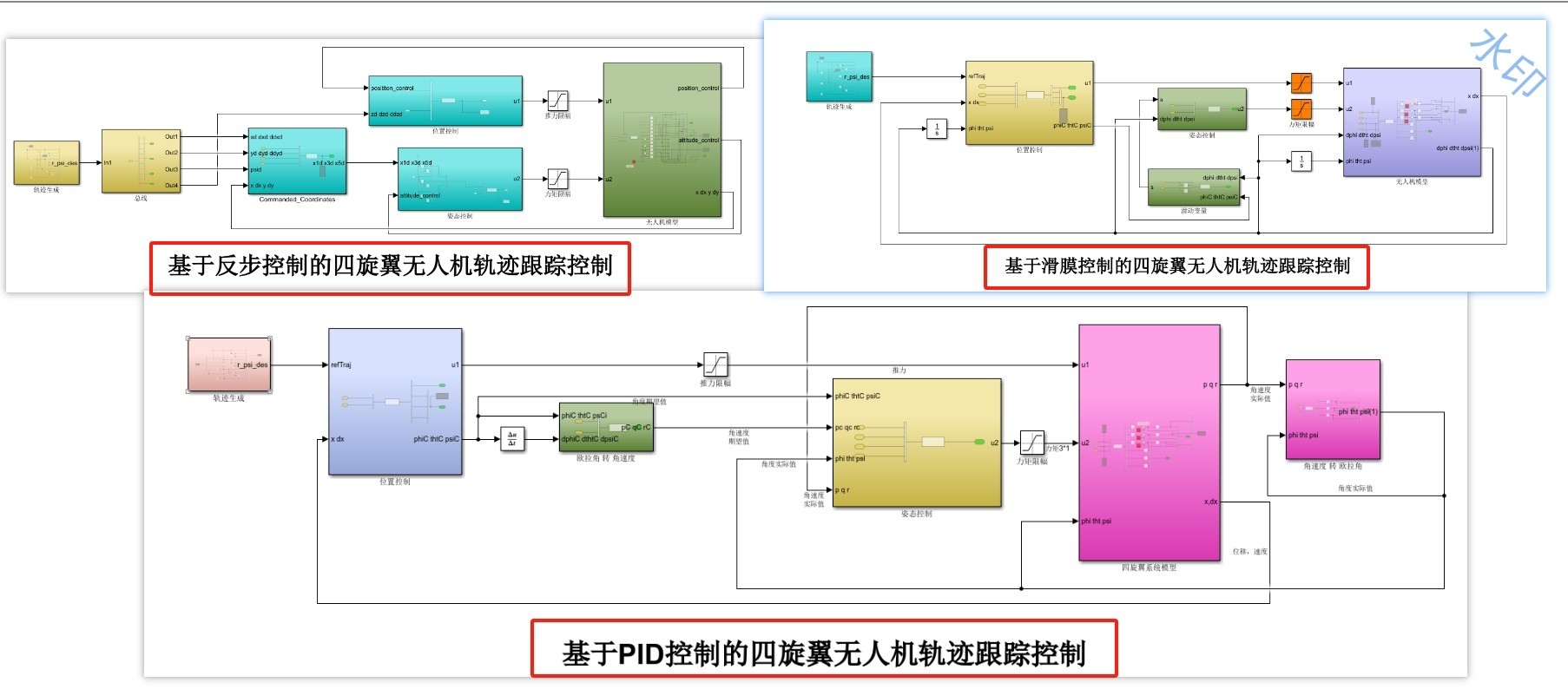
PID_反步控制_滑膜控制三种四旋翼无人机轨迹跟踪控制算法仿真 附带对应的说明文档,提供建模过程与仿真结果文献(英文)PPT 描述:采用的同一种参考轨迹,都是三维仿真 三种控制方法: [1]PID控制、[2]反步控制、[3]滑膜控制(三个仿真模型) 每个仿真均应用了同一种轨迹路径,直接运行即可出三维图,可以实现四旋翼无人机轨迹的跟踪
最近在研究四旋翼无人机的轨迹跟踪控制算法,尝试了三种不同的控制方法:PID控制、反步控制和滑膜控制。为了对比效果,我采用了同一种参考轨迹,并在三维仿真中进行了测试。下面分享一下我的实验过程和结果,顺便穿插一些代码和分析。
1. PID控制
PID控制是最经典的控制方法之一,简单易懂,实现起来也相对容易。对于四旋翼无人机,PID控制器主要用来调节姿态和位置。下面是一个简单的PID控制器的实现代码:
% PID控制器参数
Kp = 1.0;
Ki = 0.01;
Kd = 0.1;
% 误差计算
error = desired_position - current_position;
integral = integral + error;
derivative = error - previous_error;
% 控制输出
control_output = Kp * error + Ki * integral + Kd * derivative;这个代码片段展示了PID控制器的基本结构。Kp、Ki和Kd分别是比例、积分和微分增益。通过调整这些参数,可以优化控制器的性能。不过,PID控制的一个问题是它对于非线性系统的控制效果有限,尤其是在四旋翼无人机这种复杂的动力学系统中。
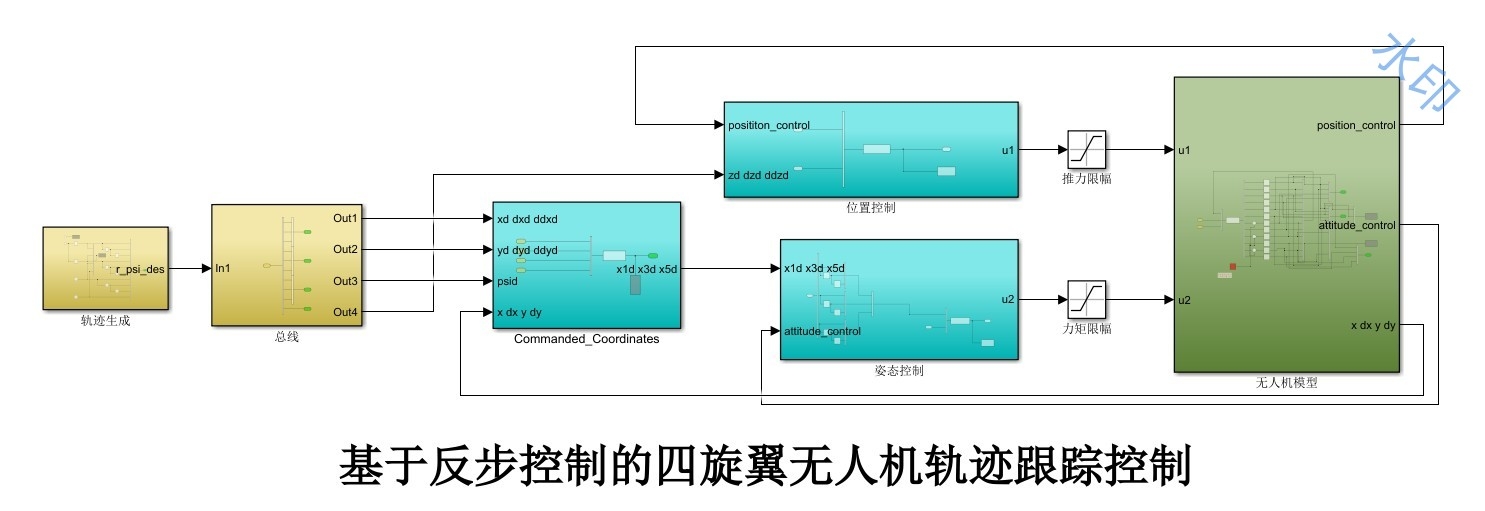
2. 反步控制
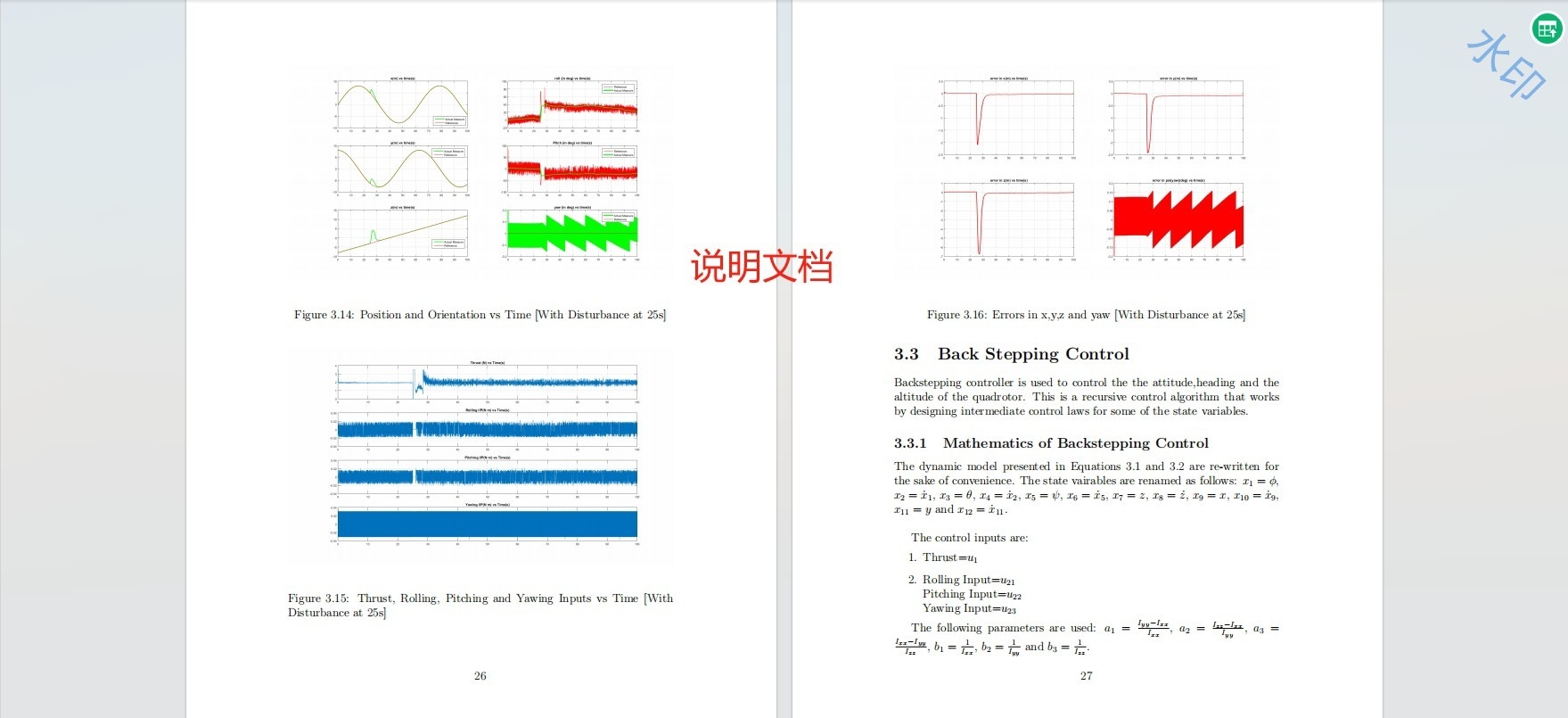
反步控制(Backstepping Control)是一种基于Lyapunov稳定性的非线性控制方法。它通过逐步设计控制器来保证系统的稳定性。反步控制的实现相对复杂,但它在处理非线性系统时表现更好。
% 反步控制器设计
alpha1 = -K1 * z1;
alpha2 = -K2 * z2 - z1;
% 控制律
u = -K3 * z3 - alpha2;在这个代码片段中,z1、z2和z3是系统的状态变量,K1、K2和K3是控制增益。反步控制的核心思想是通过逐步设计虚拟控制量来保证系统的稳定性。虽然实现起来比PID复杂,但它在处理非线性系统时表现更优。
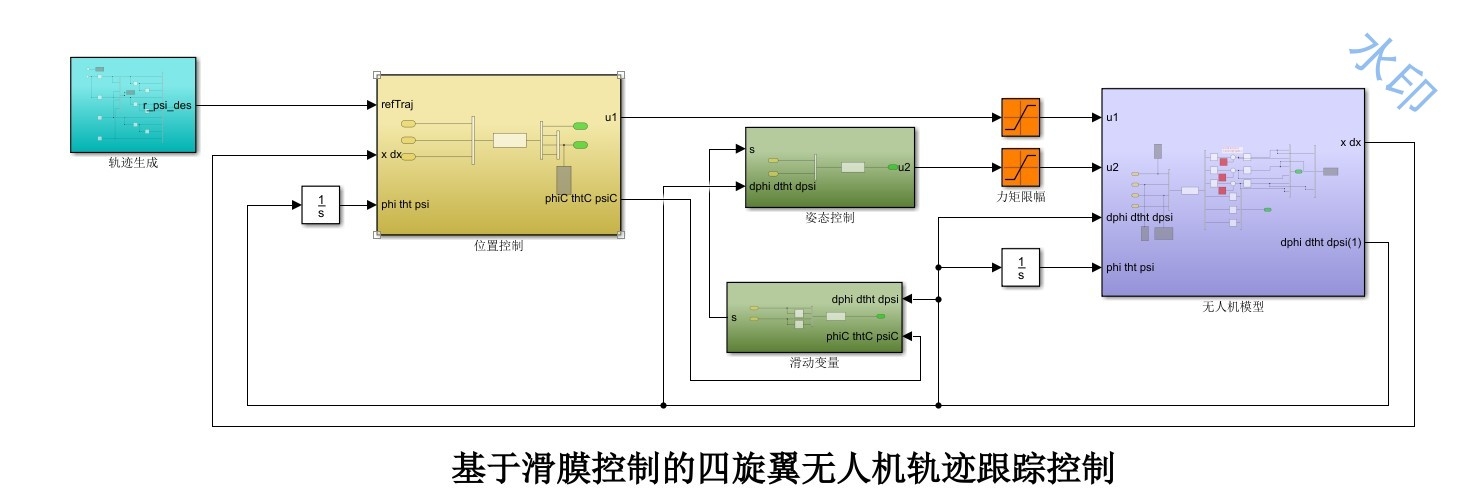
3. 滑膜控制
滑膜控制(Sliding Mode Control)是一种鲁棒性很强的控制方法,特别适合处理不确定性和外部干扰。滑膜控制通过设计滑模面,使系统状态在有限时间内到达滑模面,并在滑模面上滑动。
% 滑模面设计
s = error + lambda * integral_error;
% 控制律
u = -K * sign(s);在这个代码片段中,s是滑模面,lambda是滑模面参数,K是控制增益。滑膜控制的优点是对系统参数变化和外部干扰具有较强的鲁棒性,但它的缺点是容易产生抖振现象。
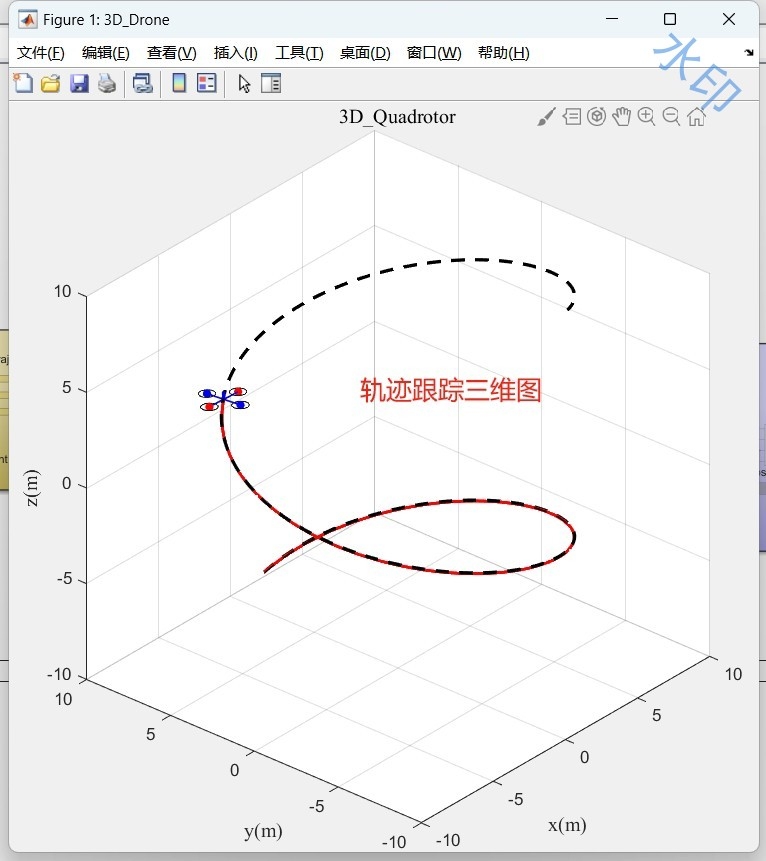
仿真结果
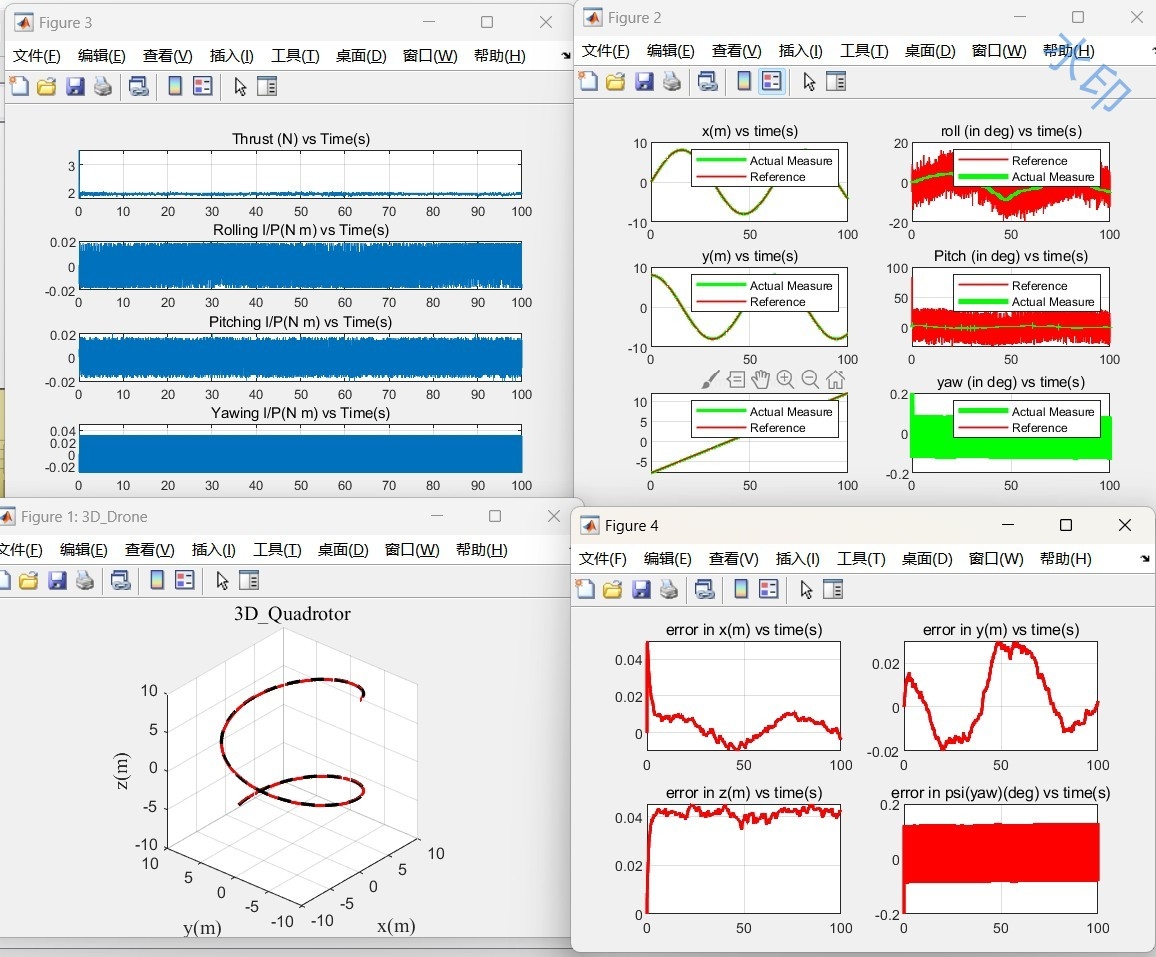
为了对比这三种控制方法的性能,我采用了同一种参考轨迹进行仿真。下面是仿真结果的简要分析:
- PID控制:在简单的轨迹跟踪任务中,PID控制表现良好,但在复杂轨迹或存在外部干扰时,控制效果会下降。
- 反步控制:反步控制在处理非线性系统时表现更优,能够更好地跟踪复杂轨迹,但实现起来相对复杂。
- 滑膜控制:滑膜控制对不确定性和外部干扰具有较强的鲁棒性,但在实际应用中需要注意抖振问题。
总结
通过这次实验,我深刻体会到不同控制方法在四旋翼无人机轨迹跟踪中的优缺点。PID控制简单易用,但处理复杂系统时效果有限;反步控制适合处理非线性系统,但实现复杂;滑膜控制鲁棒性强,但需要注意抖振问题。在实际应用中,可以根据具体需求选择合适的控制方法。
PID_反步控制_滑膜控制三种四旋翼无人机轨迹跟踪控制算法仿真 附带对应的说明文档,提供建模过程与仿真结果文献(英文)PPT 描述:采用的同一种参考轨迹,都是三维仿真 三种控制方法: [1]PID控制、[2]反步控制、[3]滑膜控制(三个仿真模型) 每个仿真均应用了同一种轨迹路径,直接运行即可出三维图,可以实现四旋翼无人机轨迹的跟踪
如果你对这次实验的详细建模过程和仿真结果感兴趣,可以参考我提供的英文文献和PPT。希望这篇文章对你有所帮助,也欢迎大家一起讨论和交流!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 8
8 0
0- 0



 已为社区贡献52条内容
已为社区贡献52条内容

所有评论(0)