【24年最新算法】首发CPO-XGBoost回归+交叉验证 基于冠豪猪优化算法-XGBoost多变量回归预测
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
👇 关注我领取海量matlab电子书和数学建模资料
🍊个人信条:格物致知,完整Matlab代码获取及仿真咨询内容私信。
🔥 内容介绍
CPO-XGBoost 回归是将冠豪猪优化算法(CPO)与 XGBoost 相结合用于多变量回归预测的方法,交叉验证用于评估模型性能,其背景原理如下:
冠豪猪优化算法(CPO)
- 灵感来源
:CPO 是一种新型群体智能算法,灵感源于豪猪的防御机制。豪猪遇威胁时会有多种防御行为,如用刺抵御并后退、与其他豪猪协作、随机摆尾或刺击、主动进攻或逃离等。CPO 将这些行为抽象为搜索过程中的算子,以此兼顾全局探索与局部开发。
- 算法步骤
:首先在指定范围内随机生成种群并计算初始适应度。然后通过多重防御机制更新个体,前两种防御机制用于初期探索,个体随机与最优解或随机个体交互;后两种用于后期开发或逃离局部最优,通过指数或正态随机扰动增强搜索多样性。每次迭代后更新全局最优解,对比个体当前解与历史最优解并保留较优者,同时根据特定公式动态调整种群规模,达到最大迭代次数后输出最优解。
XGBoost 回归模型
XGBoost 是梯度提升树模型的经典代表,具有强大的非线性拟合能力。它通过迭代地训练决策树,不断减少预测误差,在各类回归任务中表现优异。但 XGBoost 的性能对超参数较为敏感,如树的数量、最大深度等,合适的超参数能显著提升模型的泛化能力和预测精度。
CPO 优化 XGBoost 原理
将 CPO 应用于 XGBoost,是利用 CPO 的优化能力对 XGBoost 的超参数进行寻优。先定义一个目标函数,通常以交叉验证得分来衡量模型表现,如使用均方误差(MSE)作为评价指标。然后 CPO 设置初始种群规模、搜索范围等参数,种群中的每个个体代表一组可能的 XGBoost 超参数配置。通过 CPO 算法的迭代优化,寻找使目标函数值最优的超参数组合,从而提高 XGBoost 模型的预测准确性和泛化能力。
交叉验证
在 CPO-XGBoost 回归模型中,交叉验证用于评估模型性能和选择最优超参数。通常采用 K 折交叉验证,将数据集划分为 K 个互不相交的子集,每次用 K-1 个子集作为训练集训练模型,剩余 1 个子集作为验证集测试模型性能,重复 K 次,最后将 K 次验证结果平均,得到模型的评估指标,以此更可靠地评估模型性能,减少过拟合风险。
![]()
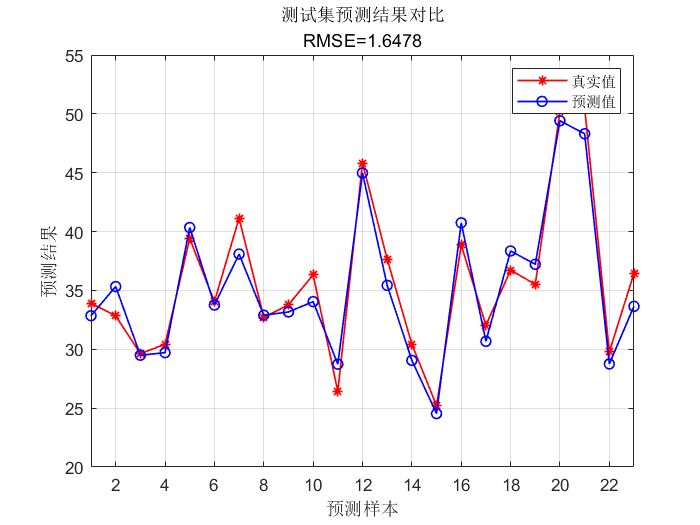
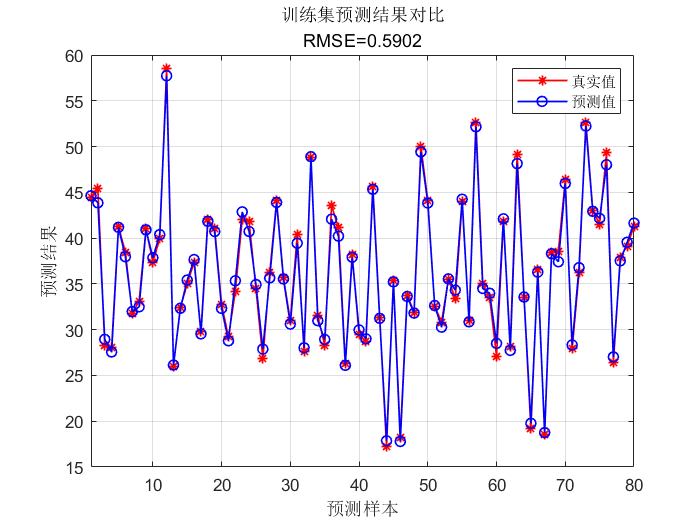
⛳️ 运行结果
![]()
📣 部分代码
% Source codes demo version 1.1
%__________________________________________________________________
% Chinese pangolin optimizer (CPO)
% Developed in MATLAB R2021b
% programmer: Zhiqing GUO
% E-mail: mathgzq@gmail.com
% Paper:
% Zhiqing GUO, Guangwei LIU, Feng JIANG, and Wei LIU
% Chinese Pangolin Optimizer: A new bio-inspired metaheuristic algorithm
%__________________________________________________________________
function [Manis_score,Manis_pos,Convergence_curve]=CPO(SearchAgents_no,Max_iter,lb,ub,dim,fobj)
tic;
Manis_pos=zeros(1,dim);
Manis_score=inf;
Ant_pos=zeros(1,dim);
Ant_score=inf;
%Initialize the positions of search agents
Positions=initialization(SearchAgents_no,dim,ub,lb);
Convergence_curve=zeros(1,Max_iter);
t=1;
while t<=Max_iter
for i=1:size(Positions,1)
% boundary checking
Flag4ub=Positions(i,:)>ub;
Flag4lb=Positions(i,:)<lb;
Positions(i,:)=(Positions(i,:).*(~(Flag4ub+Flag4lb)))+ub.*Flag4ub+lb.*Flag4lb;
% Calculate objective function for each search agent
fitness=fobj(Positions(i,:));
% Update the location of Manis pentadactyla
if fitness<Manis_score
Manis_score=fitness; % Update Manis Pentadactyla
Manis_pos=Positions(i,:);
end
if fitness>Manis_score && fitness<Ant_score
Ant_score=fitness; % Update Ant
Ant_pos=Positions(i,:);
end
end
% Aroma concentration factor
MM= Aroma_concentration(Max_iter);% Eq.(9) - Eq.(14)
Cm=MM(randperm(Max_iter));
% Rapid decrease factor
C1 = 2-t*((2)/Max_iter);% Eq.(28)
% Aroma trajectory factor
a = Aroma_trajectory(dim,0.3);% Eq.(21) and Eq.(22)
% Levy step length
Levy_Step_length = Levy(dim);% Eq.(29) and Eq.(30)
for i=1:size(Positions,1)
for j=1:size(Positions,2)
% Fatigue index factor
Fatigue = log(((t*pi)/Max_iter)+1);% Eq.(25)
% Energy correction factor
lamda = 0.1*rand();
VO2 = 0.2*rand();
% Energy consumption factor
E = exp(-lamda*VO2*t*(1 + Fatigue));% Eq.(24)
% Energy fluctuation factor
A1 = 2*E*rand()-E; %Eq.(23)
l = randi([1, Max_iter]);
r3 = rand();
%% Luring behavior
if Cm(l)>=0.9 && r3<=0.6
%% Attraction and Capture Stage
D_ant = abs(a*Ant_pos(j)-Manis_pos(j));% Eq.(19)
New_Ant_pos = Ant_pos(j)-A1*D_ant;% Eq.(20)
%% Movement and Feeding Stage
D_manis = abs((C1*New_Ant_pos-Positions(i,j)))+Levy_Step_length(j)*(1-t/Max_iter);% Eq.(26)
New_Manis_pos = Positions(i,j) + Manis_pos(j)-A1*D_manis;% Eq.(27)
Positions(i,j) = (New_Manis_pos+New_Ant_pos)/2;
%% Predation behavior
elseif Cm(l)<=0.9 || r3>0.5
%% Search and Localization Stage
if Cm(l)>=0 && Cm(l)<0.2
D_manis = abs(Levy_Step_length(j)*Manis_pos(j)-Positions(i,j));% Eq.(31)
New_Manis_pos = C1*Positions(i,j) + A1*abs(Manis_pos(j)-Levy_Step_length(j)*D_manis);% Eq.(32)
%% Rapid Approach Stage
elseif Cm(l)>=0.2 && Cm(l)<0.6
D_manis = abs(a*Manis_pos(j)-Positions(i,j));% Eq.(33)
New_Manis_pos= a*Positions(i,j)+A1*abs(Manis_pos(j)-exp(-a).*sin(Levy_Step_length(j).*pi)*D_manis);% Eq.(34)
%% Digging and Feeding Stage
elseif Cm(l)>=0.6
D_manis = abs(C1*Manis_pos(j)-Positions(i,j));% Eq.(35)
New_Manis_pos = C1*Positions(i,j) + A1*abs(Manis_pos(j)-D_manis);% Eq.(36)
end
Positions(i,j) = New_Manis_pos;
end
end
end
%----------------------------------------------------------------------
if mod(t,100)==0
display(['At iteration ', num2str(t), ' the best solution fitness is ', num2str(Manis_score)]);
end
Convergence_curve(t)=Manis_score; t=t+1;
end
![]()
🔗 参考文献
![]()
🍅往期回顾扫扫下方二维码
![]()
- END -
![]()

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 0
0 0
0- 0



 已为社区贡献58条内容
已为社区贡献58条内容

所有评论(0)