基于分布式模型预测控制的多智能体点对点转换轨迹生成Matlab程序
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
👇 关注我领取海量matlab电子书和数学建模资料
🍊个人信条:格物致知,完整Matlab代码获取及仿真咨询内容私信。
🔥 内容介绍
一、多智能体系统概述与轨迹生成挑战
- 多智能体系统的广泛应用
:多智能体系统由多个相互作用的智能体组成,在众多领域发挥着重要作用。例如在智能交通中,自动驾驶车辆可看作智能体,协同优化交通流;在工业生产里,机器人作为智能体协作完成复杂任务;军事领域的无人机集群也属于多智能体系统,执行侦察、攻击等任务。
- 轨迹生成面临的难题
:多智能体从初始位置移动到目标位置过程中,要实现高效、安全的轨迹生成面临诸多挑战。一方面,每个智能体需规划自身路径,同时避免与其他智能体碰撞,这要求各智能体之间有效协调。另一方面,随着智能体数量增加,集中式控制方法因计算负担过重、通信瓶颈等问题难以适用,因此需要分布式的解决方案来提升系统的可扩展性。
二、分布式模型预测控制(DMPC)基础原理
- 模型预测控制(MPC)核心概念
:模型预测控制是基于模型的先进控制策略。其核心是利用系统预测模型,在每个采样时刻预测系统未来一段时间(预测时域)的输出。通过求解有限时域的优化问题,获取当前时刻最优控制输入,使系统输出尽可能接近期望值,并满足输入输出约束、状态约束等条件。每个新采样时刻,依据最新系统状态信息,滚动优化控制输入。
- 分布式特性
:分布式模型预测控制将 MPC 应用于多智能体系统,强调各智能体仅依据自身局部信息及与相邻智能体交互信息决策。每个智能体有自己的预测模型和优化问题,通过与邻居智能体交换信息,协同进行轨迹规划。这种分布式架构避免了集中式控制中所有智能体信息汇总到中央控制器处理的弊端,减轻计算负担和通信压力,提升系统可扩展性。
三、基于 DMPC 的多智能体轨迹生成原理
- 智能体局部模型构建
:每个智能体依据自身动力学特性构建预测模型,描述自身状态(如位置、速度、加速度等)随控制输入变化的规律。例如,移动机器人智能体根据其运动学和动力学方程建立模型,飞行器智能体依据飞行力学原理建模。
- 信息交互与协同
:智能体与相邻智能体交换自身状态信息和预测的未来状态信息。通过信息交互,智能体了解周边其他智能体的运动趋势,为避免碰撞和协同轨迹规划提供基础。如在无人机编队飞行中,各无人机将自身位置、速度及未来短时间内预测的飞行轨迹告知相邻无人机。
- 分布式优化求解
:每个智能体在自身预测时域内求解优化问题,目标是使自身运动轨迹满足到达目标位置要求,同时避免与相邻智能体碰撞。优化过程考虑自身状态约束(如最大速度、最大加速度等)和与相邻智能体的协同约束。例如,优化函数可包含智能体到目标位置的距离最小化项,以及与相邻智能体距离保持安全间隔的约束项。通过求解优化问题,智能体确定当前时刻最优控制输入,如机器人的电机驱动指令、无人机的舵面控制指令等。
- 滚动优化实现轨迹生成
:智能体执行当前时刻最优控制输入后,进入下一采样时刻。此时,智能体依据新获取的自身状态信息和与相邻智能体交互的最新信息,重新进行预测和优化求解,更新控制输入。通过不断滚动优化,智能体逐步生成从初始位置到目标位置的轨迹,同时在运动过程中实时应对其他智能体运动变化及环境干扰,确保轨迹的安全性和有效性。
四、与其他方法对比优势
- 可扩展性强
:与集中式控制方法相比,分布式模型预测控制避免了中央控制器处理大量智能体信息的瓶颈问题。随着智能体数量增加,每个智能体仅处理与自身及相邻智能体相关信息,计算负担和通信压力增长缓慢,系统可扩展性良好。例如在大规模无人机集群应用中,分布式方法能更好适应集群规模扩大。
- 实时性与鲁棒性
:分布式架构使各智能体可独立、快速响应环境变化。当某个智能体因外界干扰改变运动状态时,相邻智能体可及时获取信息并调整自身轨迹,避免碰撞。同时,每个智能体在滚动优化过程中不断根据新信息调整控制输入,增强系统对环境不确定性和智能体模型误差的鲁棒性。
- 计算效率高
:由于各智能体分布式并行计算优化问题,无需等待中央控制器统一处理,整体计算效率提升。与一些基于顺序计算的优化方法相比,能在更短时间内完成轨迹生成,满足多智能体系统实时性要求。
![]()
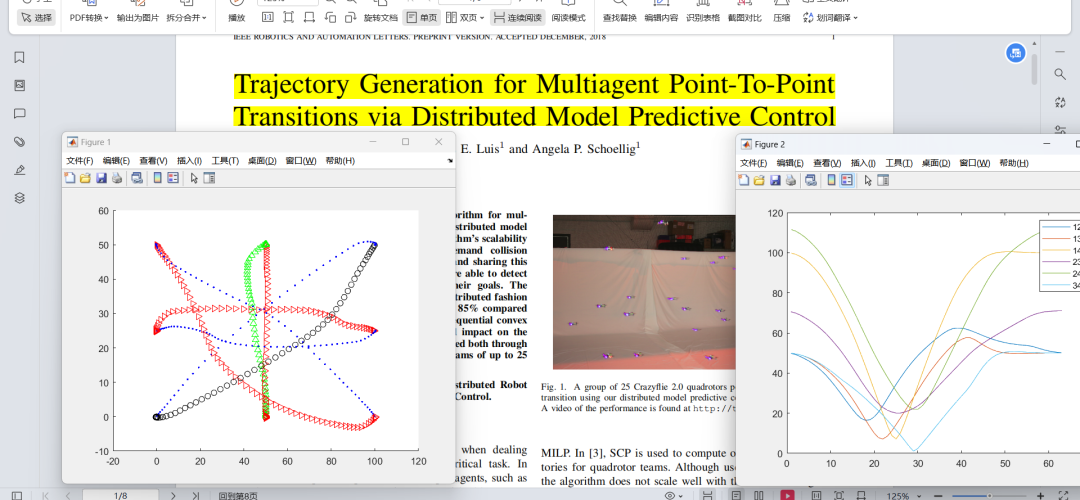
⛳️ 运行结果
![]()
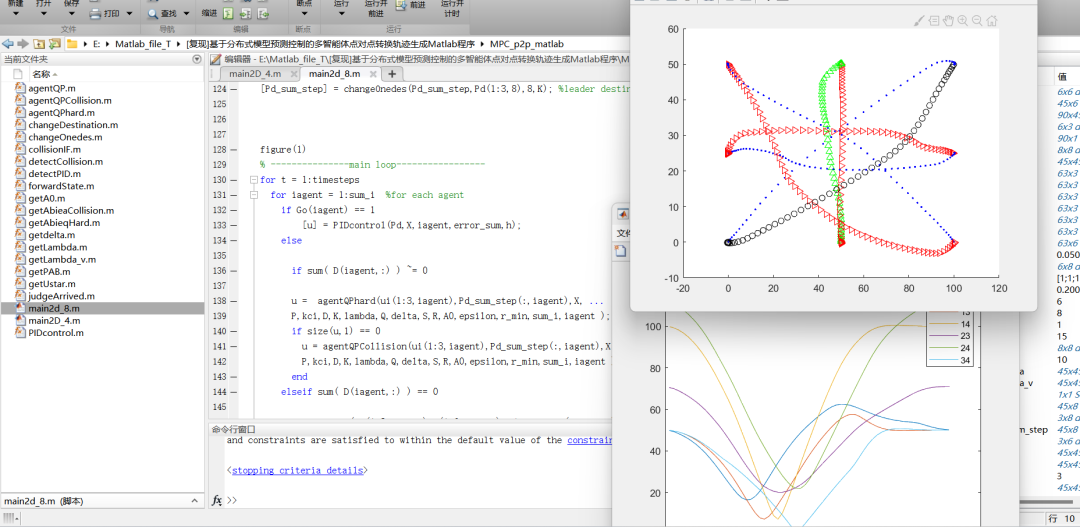
📣 部分代码
![]()
🔗 参考文献
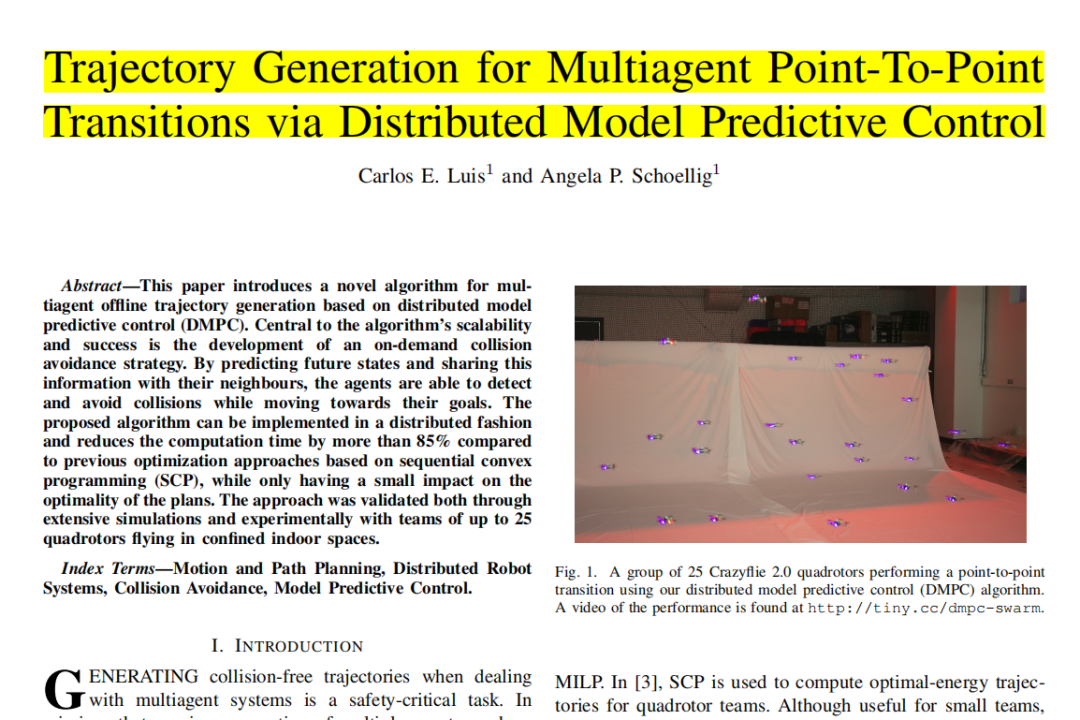
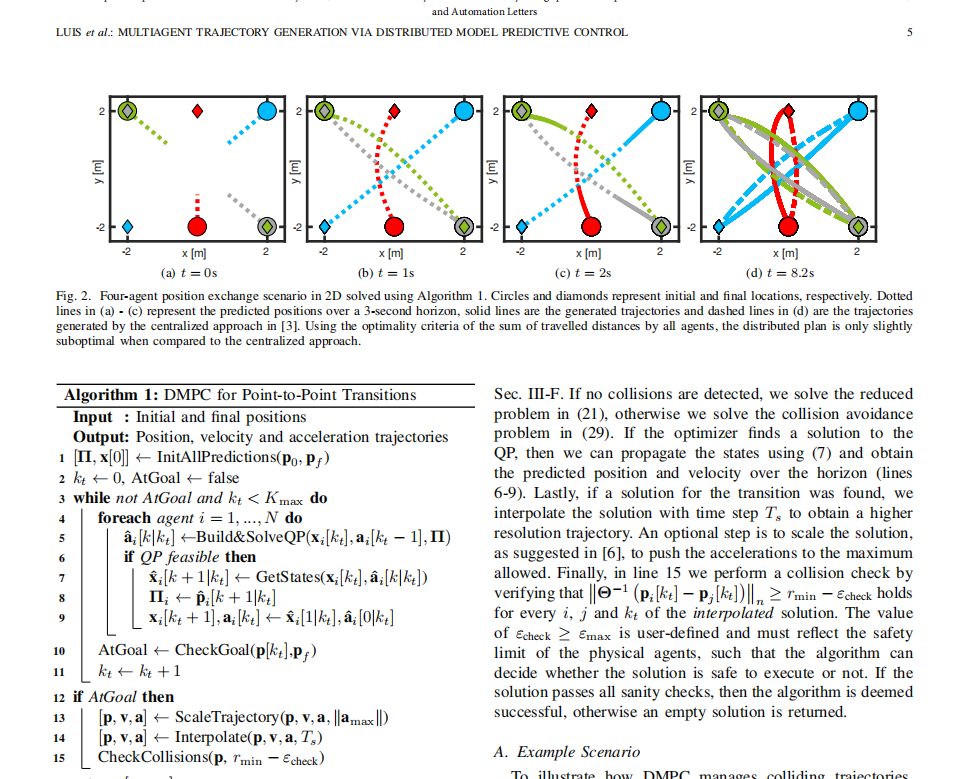
[1] Luis C E , Schoellig A P .Trajectory Generation for Multiagent Point-To-Point Transitions via Distributed Model Predictive Control[J].IEEE Robotics & Automation Letters, 2018:1-1.DOI:10.1109/LRA.2018.2890572.
![]()
🍅往期回顾扫扫下方二维码
![]()
- END -
![]()

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 0
0 0
0- 0



 已为社区贡献58条内容
已为社区贡献58条内容

所有评论(0)