01春晚舞蹈机器人复刻_跟做记录
配置因为视频里看不出来,我选的是:
具身机器人/IsaacSim5.1+IsaacLab-2.3.2 pip安装版
RTX 4090 / 24GB*1 卡
这边真心建议跟教程不要跟视频,和教程对不上
教程地址
every-embodied/07-机器人操作、运动控制/Locomotion/01春晚舞蹈机器人复刻.md at main · datawhalechina/every-embodied
列出所有pip命令
pip list
pip配置
git config --global url."https://gh-proxy.org/https://github.com/".insteadOf "https://github.com/"
查看当前配置
pip config list
cd
cd /root/gpufree-data/every-embodied/07-机器人操作、运动控制/Locomotion/video2robot
激活
conda activate phmr
git clone https://github.com/datawhalechina/every-embodied.git
git clone https://github.com/datawhalechina/every-embodied.git
cd every-embodied/07-机器人操作、运动控制/Locomotion/video2robot
cd third_party
3. 克隆 GMR
git clone --depth 1 https://github.com/taeyoun811/GMR.git GMR
4. 克隆 PromptHMR
git clone --depth 1 https://github.com/taeyoun811/PromptHMR.git PromptHMR
cd ..
git apply patches/main.patch
git -C third_party/PromptHMR apply ../../patches/prompthmr.patch
git -C third_party/GMR apply ../../patches/gmr.patch
conda env create -f envs/gmr.yml
报错,继续往下走
ERROR: No matching distribution found for video2robot==0.1.0
phmr.yml里修改为:
prefix: /root/gpufree-data/conda_envs/phmr
conda config --add envs_dirs /root/gpufree-data/conda_envs
conda env create -f envs/phmr.yml
conda activate gmr
cd /root/gpufree-data/every-embodied/07-机器人操作、运动控制/Locomotion/video2robot
pip install -e .
pip install loop-rate-limiters
pip install smplx
pip install imageio
pip install mink
pip install rich
pip install imageio[ffmpeg]
原视频9分钟:
(base) root@gpufree-container:~/gpufree-data#
conda create -p /root/gpufree-data/conda_envs/phmr --clone/root/gpu-freedata/conda_envs/phmr
conda env remove -p /root/gpu-freedata/conda_envs/phmr
conda env list
conda config --add envs_dirs /root/gpufree-data/conda_envs
conda env list
我的路径:
conda create -p /root/gpufree-data/every-embodied/07-机器人操作、运动控制/Locomotion/video2robot/envs/phmr --clone /root/gpu-freedata/every-embodied/07-机器人操作、运动控制/Locomotion/video2robot/envs/phmr
运行完:EnvironmentLocationNotFound: Not a conda environment: /root/gpu-freedata/every-embodied/07-机器人操作、运动控制/Locomotion/video2robot/envs/phmr
conda env remove -p /root/gpu-freedata/every-embodied/07-机器人操作、运动控制/Locomotion/video2robot/envs/phmr
conda env list
conda config --add envs_dirs /root/gpufree-data/every-embodied/07-机器人操作、运动控制/Locomotion/video2robot/envs
conda env list
懒得弄克隆,跳过
mkdir -p python_libs
git clone https://github.com/Arthur151/chumpy python_libs/chumpy
python -m pip install -e python_libs/chumpy --no-build-isolation
echo 'export PYTHONPATH=$PYTHONPATH:/root/gpufree-data/every-embodied/07-机器人操作、运动控制/Locomotion/video2robot/third_party/PromptHMR' >> ~/.bashrc
source ~/.bashrc
conda activate phmr
conda install -c conda-forge eigen -y
编译 lietorch
mkdir -p python_libs
cd python_libs
git clone https://github.com/princeton-vl/lietorch.git
cd lietorch
git submodule update --init --recursive
python setup.py install
cd ../..
git-lfs install
跳过:
git lfs clone https://huggingface.co/Datawhale/spring-festival-wushu-robot-replication-model
或者国内镜像
git lfs clone https://hf-mirror.com/Datawhale/spring-festival-wushu-robot-replication-model
安装 detectron2
git clone https://github.com/facebookresearch/detectron2.git
cd /root/gpufree-data/detectron2
pip install -e . --no-build-isolation
git clone https://github.com/facebookresearch/segment-anything-2.git
cd segment-anything-2
pip install -e . --no-build-isolation
sed -i 's/load_video_frames, load_video_frames_from_np/load_video_frames/g' /root/gpufree-data/every-embodied/07-机器人操作、运动控制/Locomotion/video2robot/third_party/PromptHMR/pipeline/detector/sam2_video_predictor.py
mkdir -p /root/.cache/torch/hub/checkpoints && rm -f /root/.cache/torch/hub/v0.10.0.zip.*.partial && wget -O /root/.cache/torch/hub/v0.10.0.zip https://github.com/pytorch/vision/zipball/v0.10.0 && wget -O /root/.cache/torch/hub/checkpoints/deeplabv3_resnet50_coco-cd0a2569.pth https://download.pytorch.org/models/deeplabv3_resnet50_coco-cd0a2569.pth && ls -lh /root/.cache/torch/hub/v0.10.0.zip /root/.cache/torch/hub/checkpoints/deeplabv3_resnet50_coco-cd0a2569.pth
conda activate phmr
python -m pip install -U fastapi "uvicorn[standard]" jinja2 python-multipart
pkill -f "video2robot/visualization/robot_viser.py"
cd /root/gpufree-data/every-embodied/07-机器人操作、运动控制/Locomotion/
export VISER_FIXED_PORT=8789
启动GUI
python -m uvicorn web.app:app --host 0.0.0.0 --port 8000

复制这个网址打开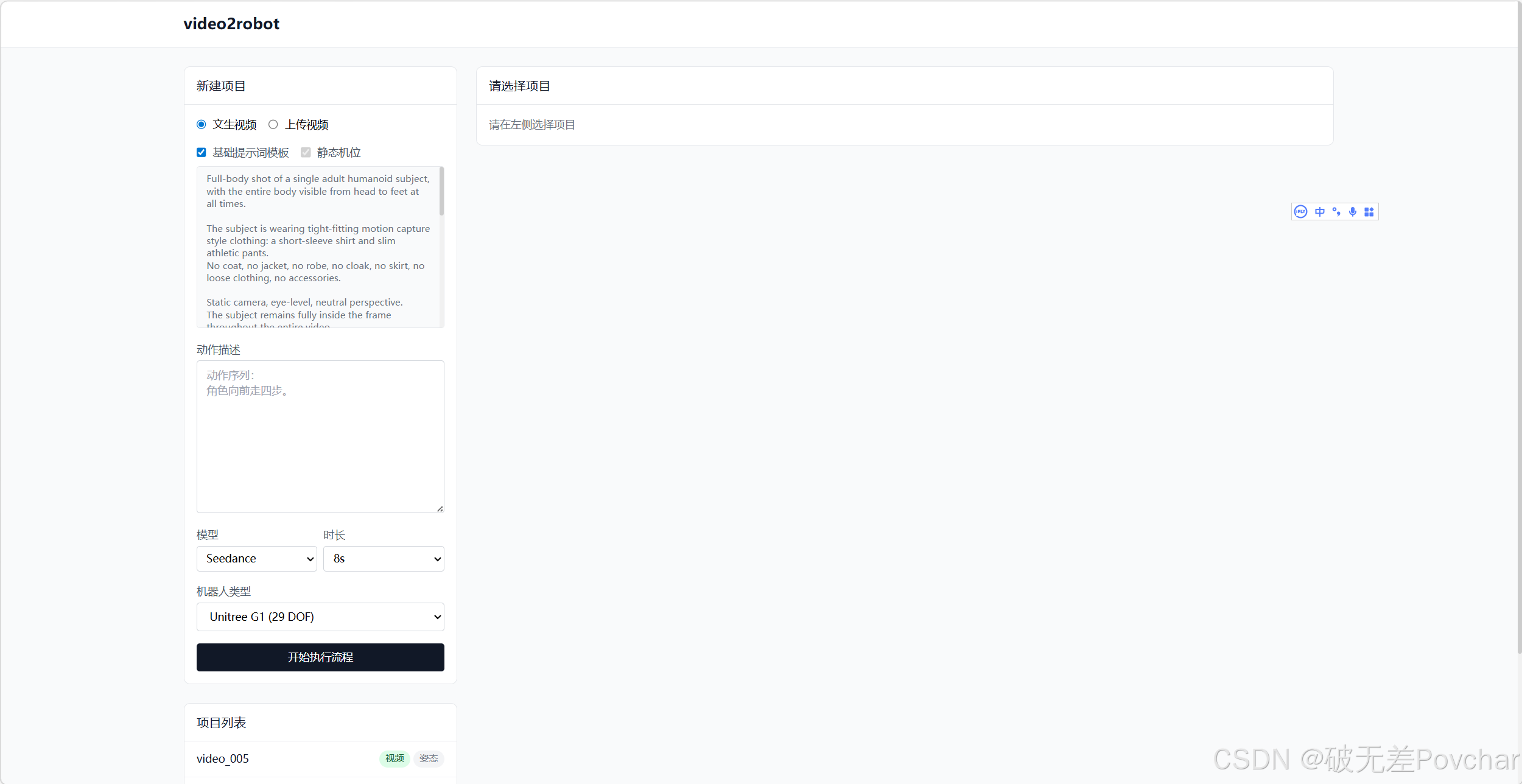
上传视频以后试试:
python scripts/extract_pose.py --project data/video_008
看看有没有报错
# ============================================
# 视频生成与处理流程注释
# ============================================
# 1. 生成视频
# 使用 seedance 模型根据文本描述生成视频
# --model: 指定使用的模型(seedance 是视频生成模型)
# --action: 描述动作的文本提示,这里描述角色向前走四步的动作序列
python scripts/generate_video.py --model seedance --action "动作序列:角色向前走四步"
# 2. 提取姿态信息
# 从生成的视频中提取人体/物体的姿态关键点
# --project: 指定项目目录,视频文件通常位于该目录下
# 这个命令会分析视频中的每一帧,提取骨骼点、关节位置等姿态数据
python scripts/extract_pose.py --project data/video_001
# 3. 转换为机器人控制指令
# 将提取的姿态数据转换为机器人可执行的指令
# --project: 指定项目目录,从该目录读取姿态数据
# --all-tracks: 处理所有轨迹(trajectories),将姿态序列转换为机器人运动轨迹
# 输出:机器人控制指令文件(如关节角度、末端位置等)
python scripts/convert_to_robot.py --project data/video_001 --all-tracks
# 4. 可视化机器人运动
# 在三维环境中可视化机器人的运动轨迹和姿态
# --project: 指定项目目录,读取机器人控制指令数据
# --robot-viser: 使用 Viser 可视化工具(一个三维可视化库)显示机器人模型
# --robot-all: 显示所有机器人相关的信息(包括轨迹、姿态、关节角度等)
# 这个命令会打开一个交互式3D窗口,展示机器人执行动作的动画
python scripts/visualize.py --project data/video_001 --robot-viser --robot-all
我装lietorch报错RuntimeError: The detected CUDA version (12.8) mismatches the version that was used to compile PyTorch (13.0)
ai:
conda activate phmr
卸载当前不兼容的 PyTorch
pip uninstall torch torchvision -y
安装与 CUDA 12.x 兼容的版本
pip install torch torchvision --index-url https://download.pytorch.org/whl/cu121
cd /root/gpufree-data/every-embodied/07-机器人操作、运动控制/Locomotion/video2robot/python_libs/lietorch
python setup.py install
报错:ModuleNotFoundError: No module named 'droid_backends_intr'怎么办
这是另一个需要编译的模块 droidcalib。按照文档执行:
bash
复制
conda activate phmr
# 设置环境变量
export CPATH="$CONDA_PREFIX/include/eigen3:${CPATH:-}"
# 编译 droidcalib
cd /root/gpufree-data/every-embodied/07-机器人操作、运动控制/Locomotion/video2robot/third_party/PromptHMR/pipeline/droidcalib
python setup.py install
python -m pip install -U torch-scatter --no-build-isolation
python -m pip install -U xformers
ImportError: /opt/conda/envs/phmr/lib/python3.10/site-packages/torch/lib/libtorch_cuda.so: undefined symbol: ncclCommWindowDeregister
pip uninstall torch-scatter -y # 为当前 torch 重新安装(用 --no-build-isolation 确保编译时能找到正确的 torch) pip install torch-scatter -f https://data.pyg.org/whl/torch-2.11.0+cu121.html --no-index --no-build-isolation
# 卸载所有 torch 相关 pip uninstall torch torchvision torch-scatter torch-sparse torch-geometric -y # 清理残留 pip cache purge # 安装 torch 2.4.0 + CUDA 12.1(稳定版本) pip install torch==2.4.0 torchvision==0.19.0 --index-url https://download.pytorch.org/whl/cu121 # 安装 torch-scatter(2.4.0 有预编译包) pip install torch-scatter -f https://data.pyg.org/whl/torch-2.4.0+cu121.html --no-index # 验证 python -c "import torch; print(torch.__version__, torch.version.cuda)"

之后我对模型进行了重下
但是都报错
原址网连不上
镜像:
Failed to fetch some objects from 'https://hf-mirror.com/Datawhale/spring-festival-wushu-robot-replication-model.git/info/lfs'
备用:
Usage: aria2c [OPTIONS] [URI | MAGNET | TORRENT_FILE | METALINK_FILE]...
See 'aria2c -h'.
unzip: cannot find or open data/body_models/smpl/smpl.zip, data/body_models/smpl/smpl.zip.zip or data/body_models/smpl/smpl.zip.ZIP.
mv: 对 'data/body_models/smpl/smpl/SMPL_python_v.1.1.0/smpl/models/basicmodel_neutral_lbs_10_207_0_v1.1.0.pkl' 调用 stat 失败: 没有那个文件或目录
mv: 对 'data/body_models/smpl/smpl/SMPL_python_v.1.1.0/smpl/models/basicmodel_f_lbs_10_207_0_v1.1.0.pkl' 调用 stat 失败: 没有那个文件或目录
mv: 对 'data/body_models/smpl/smpl/SMPL_python_v.1.1.0/smpl/models/basicmodel_m_lbs_10_207_0_v1.1.0.pkl' 调用 stat 失败: 没有那个文件或目录
Retrieving folder contents
Error:
HTTPSConnectionPool(host='drive.google.com', port=443): Max retries
exceeded with url:
/drive/folders/1JU7CuU2rKkwD7WWjvSZJKpQFFk_Z6NL7?usp=share_link&hl=en
(Caused by
NewConnectionError("HTTPSConnection(host='drive.google.com',
port=443): Failed to establish a new connection: [Errno 101] Network
is unreachable"))
To report issues, please visit https://github.com/wkentaro/gdown/issues.
倒腾两天没成功反正
https://kungfuathletebot.github.io/ 给大家看看这个 机器人武术数据集与单一策略追踪

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 13
13 0
0- 0



 已为社区贡献2条内容
已为社区贡献2条内容

所有评论(0)