Statcom与SVC静止无功补偿器Simulink仿真模型对比:无功调压下垂特性探究
statcom静止同步补偿器与SVC静止无功补偿器simulink仿真模型 ①对于无功调压下垂特性,搭建了两种补偿器来进行比对 看图的效果
在电力系统的无功补偿领域,Statcom(静止同步补偿器)和SVC(静止无功补偿器)是两种重要的装置。今天咱们就通过Simulink仿真模型,来对比分析它们在无功调压下垂特性方面的表现。
一、Simulink仿真模型搭建基础
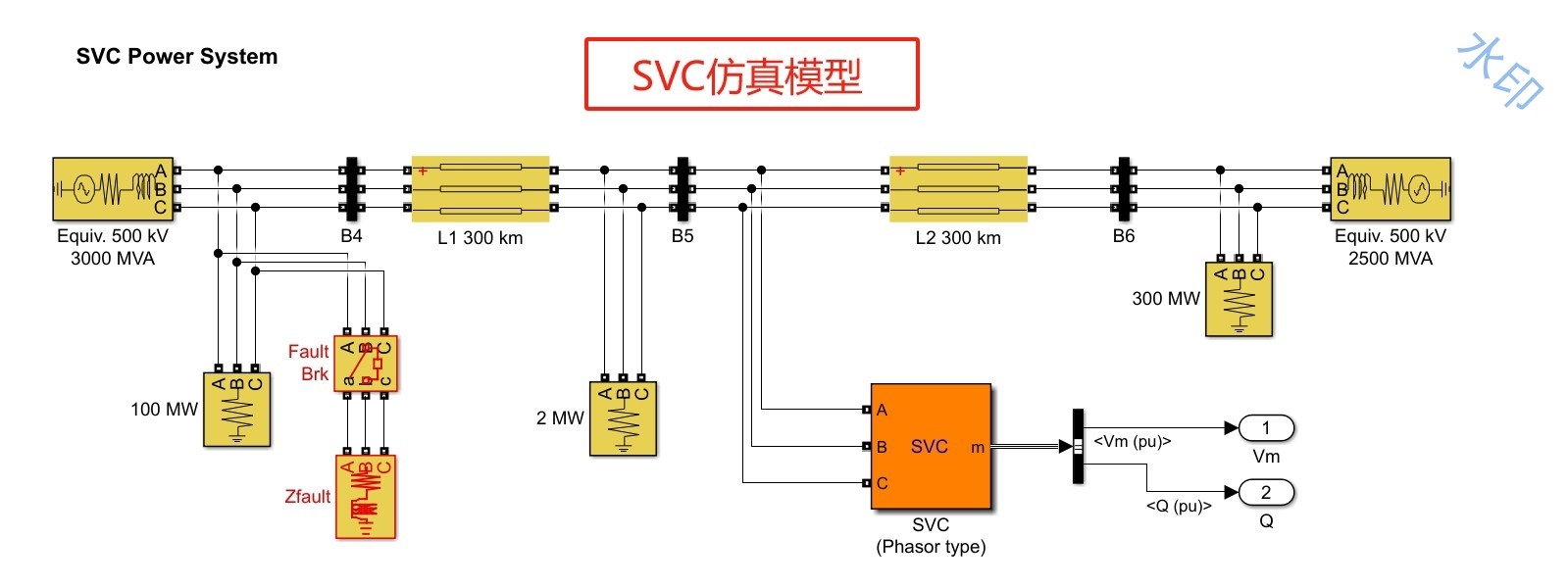
首先,在Simulink环境中搭建模型,Simulink提供了丰富的电力系统模块库,为我们搭建模型提供了极大便利。以常见的单机无穷大系统为例,系统结构大致包含电源模块、输电线路模块、负荷模块以及我们要研究的无功补偿装置模块(Statcom和SVC)。
1. SVC模型搭建
SVC主要由晶闸管控制电抗器(TCR)和固定电容器(FC)组成。在Simulink中,我们可以使用电力系统库中的晶闸管模块来搭建TCR部分。比如,下面这段简单的代码(以MATLAB脚本形式示意,实际在Simulink中以模块连接实现逻辑):
% 模拟TCR控制逻辑
alpha = 0.5; % 晶闸管触发角
if(t > 0)
if(t < 0.02)
alpha = 0.8; % 在初始0.02秒内,触发角设置为0.8
end
end这段代码大致模拟了TCR随着时间变化,晶闸管触发角的调整逻辑。TCR通过改变晶闸管的触发角来控制电抗器的等效电抗,从而调节无功功率。而FC部分相对简单,直接使用电容模块即可。两者组合起来,就构成了SVC的基本结构。
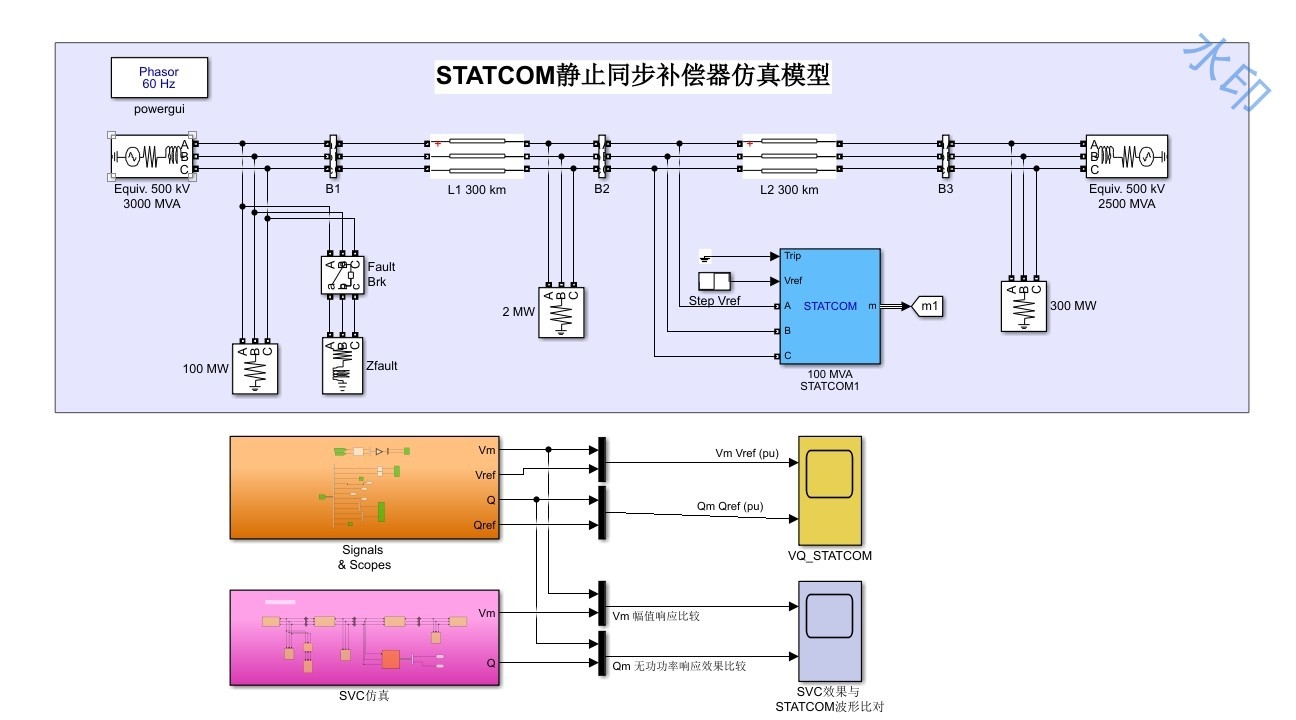
2. Statcom模型搭建
Statcom基于电压源换流器(VSC)技术。在Simulink中,我们可以使用电力电子模块库中的VSC相关模块来搭建。VSC的控制是关键,以dq坐标系下的控制为例,代码示意如下:
% dq坐标系下Statcom电流控制
% 假设已经获取到当前电流id、iq以及参考电流id_ref、iq_ref
kp = 0.5;
ki = 0.1;
error_id = id_ref - id;
error_iq = iq_ref - iq;
integral_id = integral_id + error_id * Ts;
integral_iq = integral_iq + error_iq * Ts;
vd_ref = kp * error_id + ki * integral_id;
vq_ref = kp * error_iq + ki * integral_iq;上述代码实现了基于PI控制器的电流控制,通过调节参考电压vdref和vqref,来控制VSC输出的无功功率。
二、无功调压下垂特性比对
1. 下垂特性原理
无功调压下垂特性是指无功补偿装置根据系统电压的变化,自动调节无功输出,以维持系统电压稳定。其基本原理可以用一个简单的公式表示:$Q = Q{rated} - k(V - V{rated})$,其中$Q$是无功补偿装置的实际输出无功功率,$Q{rated}$是额定无功功率,$k$是下垂系数,$V$是系统实际电压,$V{rated}$是额定电压。
2. 仿真结果对比
在搭建好两种补偿器的模型,并设置好下垂特性参数后,运行仿真。从仿真结果图中可以直观地看到两者的差异。比如,当系统出现电压波动时,SVC由于其基于晶闸管控制的特点,无功调节存在一定的离散性。在电压下降初期,SVC的无功输出增加相对较慢,这是因为TCR的调节需要通过改变晶闸管触发角,而触发角的调节存在一定的时间延迟。
statcom静止同步补偿器与SVC静止无功补偿器simulink仿真模型 ①对于无功调压下垂特性,搭建了两种补偿器来进行比对 看图的效果
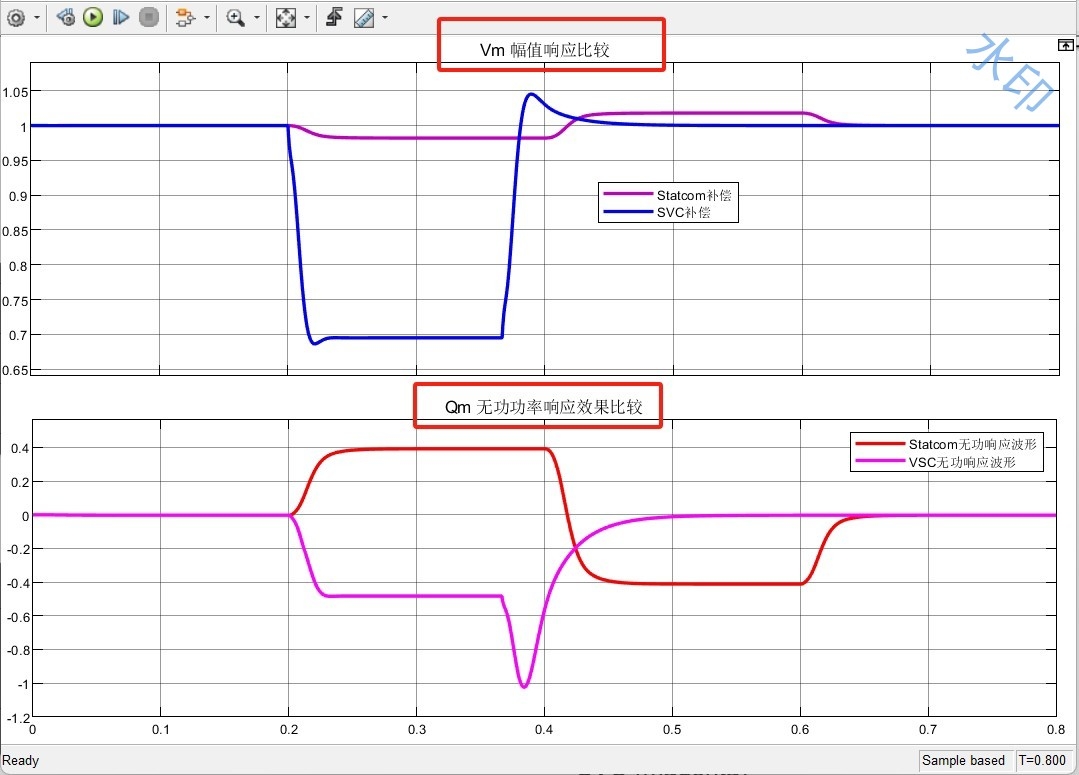
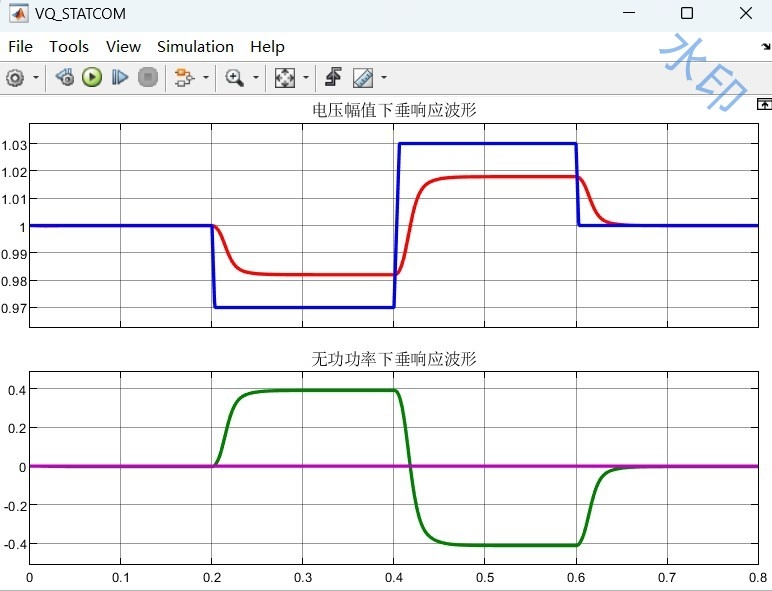
而Statcom由于采用VSC技术,其响应速度更快。从仿真波形上看,当电压发生变化时,Statcom能够迅速调整无功输出,使系统电压更快地恢复到额定值附近。
通过这次基于Simulink的仿真对比,我们对Statcom和SVC在无功调压下垂特性方面有了更清晰的认识,在实际电力系统设计和运行中,可根据具体需求来选择合适的无功补偿装置。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 6
6 0
0- 0



 已为社区贡献52条内容
已为社区贡献52条内容

所有评论(0)