移动机器人导航这事儿,说复杂是真复杂,但 MATLAB 里其实藏了不少能直接上手的示例代码。今天咱们就挑几个核心的,边看代码边聊它们到底在干嘛,怎么用起来
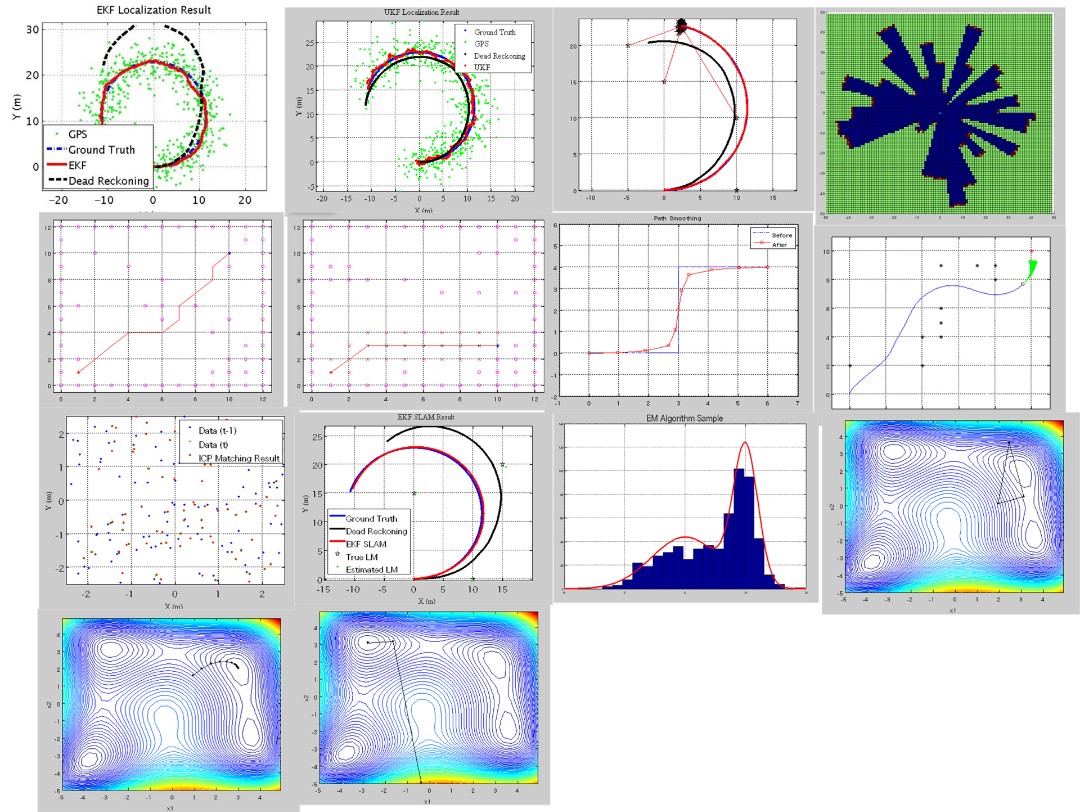
用于移动机器人导航的 MATLAB 示例 其中包括1.使用扩展卡尔曼滤波器进行定位的示例代码;2.使用 Unscented Kalman 滤波器进行定位的示例代码;3.用粒子过滤器进行定位的示例代码;使用网格地图进行映射的示例代码;5.用Dijkstra方法进行路径规划的示例代码;6.用Astar进行路径规划的示例代码;6.用梯度法进行路径平滑的示例代码;7.用动态窗口法进行局部路径规划的示例代码;8.用迭代最接近点(ICP)算法进行相对运动估计的示例代码;9.基于特征点的EKF SLAM的示例代码;10.用EM算法对混合高斯模型进行参数学习的示例代码;11.用Nelder-mead算法进行非线性优化的示例代码;12.用最陡峭下降法进行非线性优化的示例代码;用共轭梯度法进行非线性优化的示例
先说说定位。定位就是回答“我在哪儿”的问题,而环境里往往有噪声,所以滤波算法是常客。扩展卡尔曼滤波(EKF)算是经典款了,它把非线性系统在估计点附近线性化,然后套用标准卡尔曼滤波那套预测-更新流程。
% EKF 预测步骤片段
x_pred = f(x_est, u); % 非线性状态转移
F = jacobian(f, x_est); % 计算雅可比矩阵
P_pred = F * P_est * F' + Q;这里 f 是运动模型,jacobian 求偏导得到线性近似的状态转移矩阵 F。EKF 的问题在于线性化误差,尤其在非线性强的时候容易飘。
于是 Unscented Kalman Filter (UKF) 来了。它不搞线性化,而是选一组叫 sigma 点的样本,让它们经过真实非线性模型传递,再用这些点重建高斯分布。
% UKF 生成 sigma 点
[sigma_points, weights] = unscentedTransform(x_est, P_est);
sigma_points_pred = zeros(size(sigma_points));
for i = 1:size(sigma_points,2)
sigma_points_pred(:,i) = f(sigma_points(:,i), u);
end
x_pred = sigma_points_pred * weights';UKF 通常比 EKF 更稳定,尤其面对强非线性。但两者都是基于高斯假设,如果分布是多峰的(比如机器人可能在两个相似走廊中的任意一个),粒子滤波(PF)就更合适。
粒子滤波用一堆粒子表示后验分布,每个粒子是一个状态假设,通过运动模型传播,再用传感器观测给粒子赋权重,重采样。
% 粒子滤波重采样核心
cumulative_sum = cumsum(weights);
new_particles = zeros(size(particles));
for i = 1:N
r = rand();
idx = find(cumulative_sum >= r, 1);
new_particles(:,i) = particles(:,idx);
end这方法计算量大,但能处理任意分布。定位搞定了,还得有地图。网格地图简单直接,把环境划成小格子,每个格子存占据概率。
% 更新占据栅格地图(对数几率形式)
log_odds = log(map_occupied ./ (1 - map_occupied));
log_odds = log_odds + log(sensor_model(z)) - log(1 - sensor_model(z));
map_occupied = 1 - 1./(1+exp(log_odds));用对数几率形式可以避免数值问题,更新也快。
知道自己在哪,地图也有了,就该规划怎么走了。Dijkstra 是最短路径老将,它从起点开始,逐步扩展到所有可达节点。
% Dijkstra 核心循环
while ~isempty(unvisited)
[~, idx] = min(dist(unvisited));
current = unvisited(idx);
if current == goal, break; end
unvisited(idx) = [];
for neighbor = neighbors(current)
tentative = dist(current) + cost(current, neighbor);
if tentative < dist(neighbor)
dist(neighbor) = tentative;
prev(neighbor) = current;
end
end
end它保证找到最优解,但效率不高。A* 用启发函数 h(n) 引导搜索方向。
f_score = g_score + h(node, goal); % g_score 是实际代价,h 是启发函数如果 h(n) 是可采纳的(从不超估真实代价),A* 也能找到最优路径,通常比 Dijkstra 快很多。
规划出的路径可能拐弯太急,机器人不好跟,所以需要平滑。梯度下降法可以优化路径点序列,让路径更平滑且远离障碍物。
% 梯度下降平滑迭代
for iter = 1:max_iter
gradient = computeGradient(path, obstacles);
path = path - alpha * gradient;
endcomputeGradient 通常包含两项:一项让路径点靠近原始点,一项让相邻点间距均匀、角度变化小。
用于移动机器人导航的 MATLAB 示例 其中包括1.使用扩展卡尔曼滤波器进行定位的示例代码;2.使用 Unscented Kalman 滤波器进行定位的示例代码;3.用粒子过滤器进行定位的示例代码;使用网格地图进行映射的示例代码;5.用Dijkstra方法进行路径规划的示例代码;6.用Astar进行路径规划的示例代码;6.用梯度法进行路径平滑的示例代码;7.用动态窗口法进行局部路径规划的示例代码;8.用迭代最接近点(ICP)算法进行相对运动估计的示例代码;9.基于特征点的EKF SLAM的示例代码;10.用EM算法对混合高斯模型进行参数学习的示例代码;11.用Nelder-mead算法进行非线性优化的示例代码;12.用最陡峭下降法进行非线性优化的示例代码;用共轭梯度法进行非线性优化的示例
动态窗口法(DWA)则是局部规划,考虑机器人的动力学约束,在速度空间采样,模拟短时间轨迹,选最优的一条。
% DWA 轨迹评价
for v = v_range
for w = w_range
traj = simulateMotion(current_state, v, w, dt);
score = evaluateTrajectory(traj, goal, obstacles);
if score > best_score
best_v = v; best_w = w;
end
end
endevaluateTrajectory 会考虑朝向目标、远离障碍物、速度大小等因素。
移动中难免要用传感器估计自身运动,迭代最近点(ICP)就是用来对齐两帧点云,计算相对位姿变化的。
for iter = 1:max_iter
[correspondences, dists] = findNearestNeighbors(source, target);
T = estimateRigidTransform(source, target, correspondences);
source = transformPoints(source, T);
if norm(T - previous_T) < threshold, break; end
end它反复找最近点对应,再计算最优刚体变换,直到收敛。不过 ICP 容易陷局部最优,初值得好点。
把这些拼起来,就是 SLAM(同时定位与建图)了。基于特征点的 EKF SLAM 把地图特征点也放进状态向量里一起估计。
state_vector = [robot_pose; feature1; feature2; ...];
covariance_matrix = blkdiag(P_robot, P_features);每当观测到特征,就更新整个状态和协方差。但状态维数会随特征数增长,计算量平方级上升,所以大规模环境得用稀疏方法或图优化。
最后提几个底层优化工具。比如 EM 算法学高斯混合模型(GMM)参数,这可以用来对传感器数据聚类。
% EM 的 M 步更新高斯参数
for k = 1:K
resp = responsibilities(:,k); % 每个数据点属于第 k 个高斯的后验概率
mu(k,:) = sum(data .* resp) / sum(resp);
diff = data - mu(k,:);
sigma(:,:,k) = (diff' .* resp) * diff / sum(resp);
end还有非线性优化,像 Nelder-Mead(单纯形法),它不需求导,靠比较顶点函数值来移动单纯形。
% 排序顶点,计算重心
[values, order] = sort(f(simplex));
simplex = simplex(:,order);
centroid = mean(simplex(:,1:end-1), 2);然后根据反射、扩展、收缩等规则更新最差点。而最陡下降法沿着负梯度方向走,简单但可能 zigzag。
while norm(gradient) > tol
direction = -gradient;
alpha = lineSearch(f, x, direction);
x = x + alpha * direction;
gradient = computeGradient(f, x);
end共轭梯度法则更聪明,它构造的搜索方向是共轭的,通常收敛更快。
这些代码片段虽然简短,但基本反映了每个算法的核心思想。MATLAB 示例里通常有更完整的实现,包括数据生成、可视化、参数调节。真正用的时候,你得根据自己机器人的运动模型、传感器特性去调整,甚至混合几种方法。比如定位可以用 UKF 提供初值给粒子滤波,路径规划可以 A* 全局规划再 DWA 局部避障。多试试,调参数的过程虽然头疼,但也是玩机器人导航的乐趣之一吧。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 3
3 0
0- 0



 已为社区贡献31条内容
已为社区贡献31条内容

所有评论(0)