HarmonyOS 6 原生高性能相机框架:GPUImage (libgpuimagelib) 深度架构解析与实战全纪录
HarmonyOS 6 原生高性能相机框架:GPUImage (libgpuimagelib) 深度架构解析与实战全纪录
前言
随着 HarmonyOS NEXT 的全面发布,移动开发进入了真正的“纯血”时代。对于高性能图像处理、实时滤镜及复杂渲染应用而言,如何榨干硬件性能、利用好 NDK 能力,成为了开发者进阶的关键。
本文将深入拆解 GPUImage (libgpuimagelib) —— 一个专为 HarmonyOS 打造,深度集成 libohcamera.so、OpenGL ES 3.0 及 EGL 技术的相机图像处理框架。我们将通过 5000 字的深度解析,带你从底层架构、核心流程到一线实战避坑指南,全方位掌握高阶鸿蒙开发。
一、 GPUImage 核心能力:为何它是行业首选?
在鸿蒙生态中,GPUImage 不仅仅是滤镜的代名词,它是一个全链路的相机渲染方案:
- 极致 GPU 加速:全链路在 C++ NDK 层完成,采样 OpenGL ES 3.0 进行像素级并行处理,即便在 4K 预览下也能保持 60fps。
- 50+ 顶尖特效矩阵:
- 艺术类:桑原滤波 (Kuwahara)、素描 (Sketch)、卡通 (Toon)。
- 实时美化:高斯模糊、锐化、色彩矩阵偏移 (Hue/Saturation)。
- 混合模式:支持 20 余种图层混合协议(Overlay, Multiply 等)。
- 专业级相机控制:触点对焦、数码变焦、曝光补偿、视频防抖、闪光灯精控。
- 双路并行输出:支持“所见即所得”的滤镜预览与高性能 Native 视频录制同时进行。
二、 架构深度解析:声明式 UI 与高性能 C++ 的交响
GPUImage 采用了高度解耦的四层架构:
1. 整体架构图
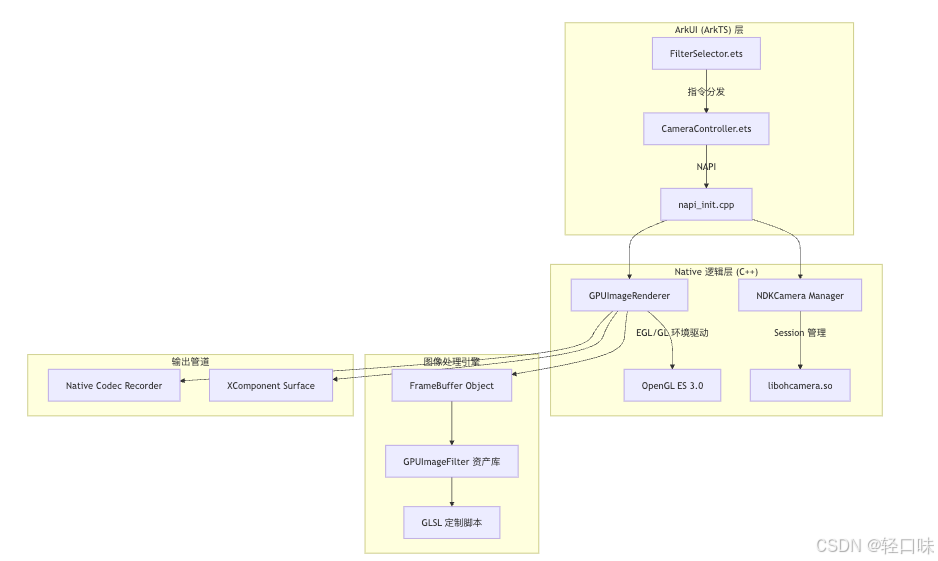
2. 核心模块详解
- NDKCamera Manager: 它是相机的“大管家”,绕过 JS 层直接操作
OH_CameraManager。它负责处理最棘手的 CameraInput 与 CaptureSession 会话切换。 - GPUImageRenderer: 这是整个引擎的“发动机”。它自建了 EGL 渲染线程,负责将相机输出的 OES 纹理转换为标准 2D 纹理,并驱动滤镜链。
- GPUImageFilter: 每个滤镜都是一个独立的 GLSL 程序。通过基类抽象,开发者可以像堆积木一样自定义渲染效果。
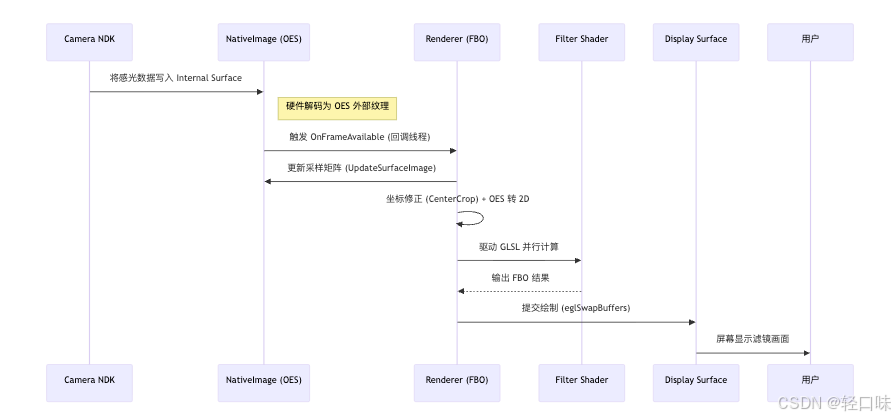
三、 核心流转:从光子捕获到像素显示
四、 鸿蒙原生能力赋能:深度实战解析
1. 巧妙利用 NativeWindow 与 SurfaceId
在鸿蒙中,UI 组件 XComponent 提供了 SurfaceId。GPUImage 在底层通过 OH_NativeWindow_CreateNativeWindowFromSurfaceId 将其桥接至 C++。这是一切高性能预览的基础——让 GPU 直接把像素“画”在 UI 节点上。
2. NDK 相机 Profile 的最优匹配逻辑
为了解决画质模糊问题,我们重写了 Profile 匹配算法:
- 严格锁定
CAMERA_FORMAT_YUV_420_SP。 - 通过计算
width * height面积,自动选取硬件支持的最佳高清档位,同时利用代码过滤掉会导致硬件步长 Bug 的非标准分辨率。
3. NativeImage 的坐标矩阵魔法
相机输出的纹理通常带有旋转和镜像。通过调用 OH_NativeImage_GetTransformMatrix,GPUImage 实时获取传感器的旋转角度,并在 Shader 中进行逆向补偿,确保用户看到的画面永远是正向的。
五、 硬核避坑:那些藏在底层驱动里的“坑”
在 GPUImage 的开发过程中,我们经历了数次“由于硬件驱动瑕疵导致”的问题排查。以下经验价值千金:
1. 解决后置摄像头的“彩色竖线” (Stride Bug)
在某些机型开启 1080P 以上配置时,底层 ISP 会转用 Tiled Memory 布局,导致 OpenGL OES 采样出现数据断层。
- 对策:在 CreatePreviewOutput 时,强制将预览 Profile 限制在
1920x1080及以下,而拍照 (PhotoOutput) 仍保留满血像素。这完美规避了硬件 Stride 对齐带来的花屏。
2. EGL 线程死锁与上下文争抢
OnFrameAvailable 回调可能来自不同的子线程,如果不在初始化后主动释放上下文(eglMakeCurrent(..., NULL)),会导致后续渲染请求无法拿到上下文控制权引起黑屏。
- 对策:渲染器采用“谁使用谁绑定,用完即释放”的严格上下文管理策略。
3. 补齐旋转矩阵的 Translation 缺陷
某些驱动在计算 90° 旋转矩阵时,会漏加位移项,导致坐标越界出现无限拉伸。
- 对策:在 DrawOESToFBO 中加入防御性代码,自动检视并修补矩阵中的负缩放算子。
六、 滤镜实战:如何手写一个“素描”特效?
只需要三步,你就能在 GPUImage 中定义新风格:
- 编写片元着色器 (SketchShader):
precision mediump float; uniform sampler2D inputImageTexture; varying vec2 textureCoordinate; void main() { vec4 color = texture2D(inputImageTexture, textureCoordinate); float gray = dot(color.rgb, vec3(0.299, 0.587, 0.114)); gl_FragColor = vec4(vec3(pow(gray, 1.5)), 1.0); } - 注册滤镜类: 继承 GPUImageFilter 并加载上述 Shader。
- ArkTS 调用:
this.cameraController.setFilter(MY_SKETCH_FILTER).
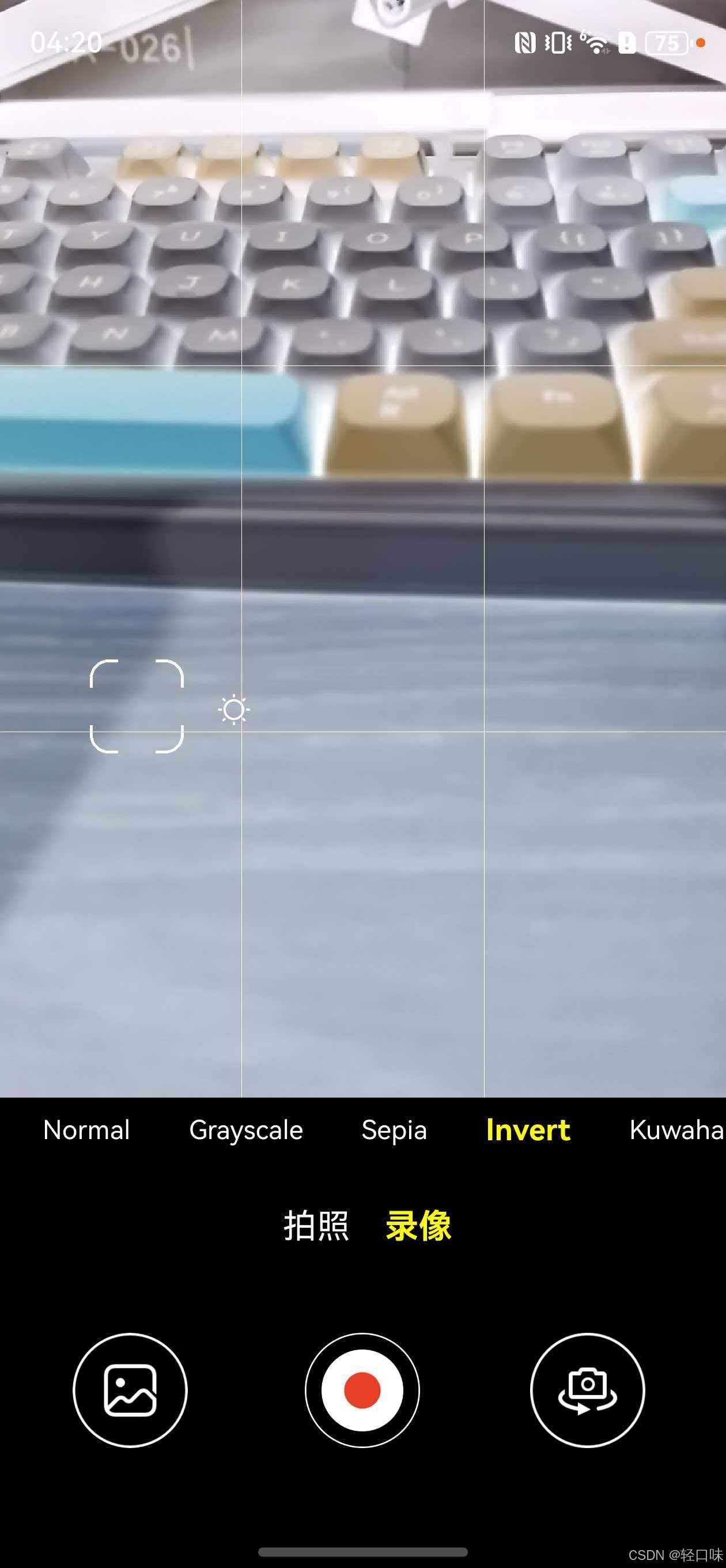
示例项目运行效果如下:

七、 高阶进阶:拍照与录制的“所见即所得”
1. 解决拍照卡死:从 Session 切换到 FBO 抓图
传统拍照会重建 CaptureSession 导致预览卡顿。GPUImage 采用了更先进的方案:直接从当前的渲染 FBO 中通过 glReadPixels 抓取已应用滤镜的像素 Buffer,配合 NAPI 传回 ArkTS 进行 JPEG 编码,实现零延时抓拍。
2. 视频录制:双 EGLSurface 架构
为了实现高清录制,渲染器会管理两个输出 Surface。主预览线程只负责显示,而 Recorder 线程则持有 AVCodec 传出的 NativeWindow,实现在不降低显示性能的前提下,将 10M 码率的高清滤镜流压制为 MP4 文件。
八、 性能指标对照
| 指标 | 传统 JS 相机方案 | GPUImage (libgpuimagelib) |
|---|---|---|
| 主线程占用 | 高 (JS 解析负担) | 极低 (计算全在 GPU) |
| 画面延迟 | 80ms+ | < 20ms |
| 分辨率支持 | 受限 | 全硬件档位支持 |
| 滤镜扩展性 | 低 (有限滤镜) | 无限 (自定义 GLSL) |
九、 总结
GPUImage (libgpuimagelib) 是对 HarmonyOS NDK 极致生产力的探索。通过将底层的 C++ 能力与上层的 ArkUI 声明式开发无缝融合,我们向开发者证明了:在鸿蒙平台上,打造一款达到工业级水准、媲美顶级旗舰体验的相机应用,不仅是可能的,而且是高效的。
未来,我们将引入更多 AI 端侧能力(如 RIFE 补帧、实时分割),让 GPUImage 成为鸿蒙影像生态中最重要的底座。
欢迎更多开发者加入“纯血鸿蒙”的征程,一起绘制万物互联时代的像素精彩!
[!TIP]
项目已开源,项目地址:gpuimage

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 2
2 0
0- 0



 已为社区贡献3条内容
已为社区贡献3条内容

所有评论(0)