【端侧部署yolo系列】yolov5_seg部署至全志开发板
注:awnpu_model_zoo\docs里有详细的开发文档以及参考指南
本文是根据《NPU开发环境部署参考指南》,部署PC的ubuntu环境,使用Docker镜像环境为例进行说明。
如果想对部署流程进行更加详细的了解,可以参考《NPU_模型部署_开发指南》
重要说明:在awnpu_model_zoo内没有的模型,可参考awnpu_model_zoo\examples里面对应系列的模型进行修改部署,需要自行编写对应模型cpp前后处理代码以及修改相应的配置文件(如model_config.h、CMakeLists.txt)。如果遇到模型导出量化失败的情况,需要对模型进行相应的裁剪、或者采用不同的量化方式等。本文的yolov5_seg已经在板端经过了推理验证。
环境配置
关于参考之前部署yolox的文章【端侧部署yolo系列】yolox部署至全志开发板T736![]() https://blog.csdn.net/troyteng/article/details/155444386?spm=1011.2124.3001.6209
https://blog.csdn.net/troyteng/article/details/155444386?spm=1011.2124.3001.6209
下载镜像文件和AWNPU_Model_Zoo,创建自己的容器。
模型准备
原始模型下载链接请参见yolov5s-seg.pt。
导出onnx模型
# 下载官方源码
git clone https://github.com/ultralytics/yolov5 # clone
cd yolov5
pip install -r requirements.txt # install
# onnx格式转换
python export.py --weights yolov5s-seg.pt --include onnx进入容器完成后续的操作。
模型简化
进入下载好的模型库文件awnpu_model_zoo/eamples
yolov5-seg网络的后处理部分8bit量化会产生较大的精度损失,通过onnx_extract.py对模型剪枝,修改输出结构,其中ouput0节点为3个输出head后处理解析后的节点;同时将后处理结构移至外部使用cpu进行相应的处理,最终模型输出差异如下,左边是官方模型,右边是修改后的模型
# 进入python目录,运行onnx_extract.py对模型进行裁剪,在convert_model目录下生成yolov5s-seg_rt.onnx
cd ./convert_model/python/
python3 onnx_extract.py
# 运行推理
python3 yolov5-seg-onnx.py -m ../yolov5s-seg_rt.onnx -i ../../model/bus.jpg -o output -s 0.25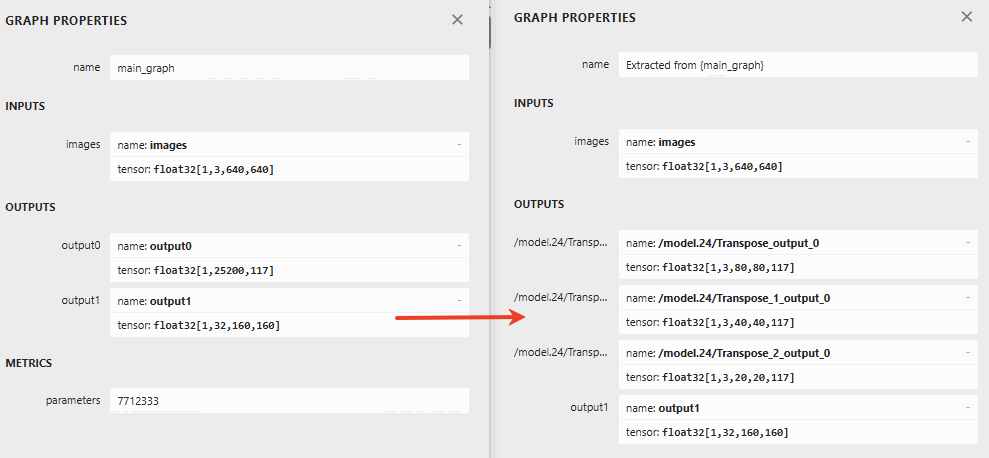
模型配置
模型配置还是参考yolox的部署,yolo系列的模型配置(归一化、前处理、RGB、量化校准数据集)都是一样的。
模型前后处理
后处理说明:对于yolov5_seg模型,就是在目标检测模型的基础上,多了一个output1掩码输出,形状为[1,32,160,160]。因此在分类和回归的后处理部分,我们可以直接参考yolov5后处理。
掩码部分的处理简单概括如下:
从每个特征图中的第五个维度117提取32个字段,是每个检测框的掩码特征系数,将目标的掩码特征与掩码原型output1进行矩阵乘法,应用sigmoid函数,调整掩码尺寸一匹配原始图像,裁剪掩码到目标边界区域。最后将结果可视化。
配置文件model_config.h
配置文件model_config.h可以直接复制其他yolo官方系列的模型(yolov5、yolov8、yolo11、yolo26)。
前处理yolov5_seg_pre.cpp
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <iostream>
#include <stdio.h>
#include <stdint.h>
#include <string.h>
#include <math.h>
#include "model_config.h"
/* model_inputmeta.yml file param modify, eg:
preproc_node_params:
add_preproc_node: true
preproc_type: IMAGE_RGB
*/
void get_input_data(const char* image_file, unsigned char* input_data, int letterbox_rows, int letterbox_cols)
{
cv::Mat sample = cv::imread(image_file, 1);
if (sample.empty()) {
fprintf(stderr, "cv::imread %s failed\n", image_file);
return;
}
cv::Mat img;
cv::cvtColor(sample, img, cv::COLOR_BGR2RGB);
/* letterbox process to support different letterbox size */
float scale_letterbox;
if ((letterbox_rows * 1.0 / img.rows) < (letterbox_cols * 1.0 / img.cols))
{
scale_letterbox = letterbox_rows * 1.0 / img.rows;
}
else
{
scale_letterbox = letterbox_cols * 1.0 / img.cols;
}
int resize_cols = int(scale_letterbox * img.cols);
int resize_rows = int(scale_letterbox * img.rows);
cv::resize(img, img, cv::Size(resize_cols, resize_rows));
// create a mat with input_data ptr
cv::Mat img_new(letterbox_rows, letterbox_cols, CV_8UC3, input_data);
int top = (letterbox_rows - resize_rows) / 2;
int bot = (letterbox_rows - resize_rows + 1) / 2;
int left = (letterbox_cols - resize_cols) / 2;
int right = (letterbox_cols - resize_cols + 1) / 2;
// Letterbox filling
cv::copyMakeBorder(img, img_new, top, bot, left, right, cv::BORDER_CONSTANT, cv::Scalar(114, 114, 114));
}
int yolov5_seg_preprocess(const char* imagepath, void* buff_ptr, unsigned int buff_size)
{
int img_c = 3;
// set default letterbox size
int letterbox_rows = LETTERBOX_ROWS;
int letterbox_cols = LETTERBOX_COLS;
int img_size = letterbox_rows * letterbox_cols * img_c;
unsigned int data_size = img_size * sizeof(uint8_t);
if (data_size > buff_size) {
printf("data size > buff size, please check code. \n");
return -1;
}
get_input_data(imagepath, (unsigned char*)buff_ptr, letterbox_rows, letterbox_cols);
return 0;
}
后处理yolov5_seg_post.cpp
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <iostream>
#include <stdio.h>
#include <vector>
#include <cmath>
#include <chrono>
#include "model_config.h"
using namespace std;
struct Object
{
cv::Rect_<float> rect;
int label;
float prob;
std::vector<float> mask_feat;
cv::Mat mask;
};
static inline float sigmoid(float x)
{
return static_cast<float>(1.f / (1.f + exp(-x)));
}
static inline float desigmoid(float x)
{
return static_cast<float>(-log(1.f/x - 1.f));
}
static inline float intersection_area(const Object& a, const Object& b)
{
cv::Rect_<float> inter = a.rect & b.rect;
return inter.area();
}
static void qsort_descent_inplace(std::vector<Object>& objects, int left, int right)
{
int i = left;
int j = right;
float p = objects[(left + right) / 2].prob;
while (i <= j)
{
while (objects[i].prob > p)
i++;
while (objects[j].prob < p)
j--;
if (i <= j)
{
// swap
std::swap(objects[i], objects[j]);
i++;
j--;
}
}
#pragma omp parallel sections
{
#pragma omp section
{
if (left < j) qsort_descent_inplace(objects, left, j);
}
#pragma omp section
{
if (i < right) qsort_descent_inplace(objects, i, right);
}
}
}
static void qsort_descent_inplace(std::vector<Object>& objects)
{
if (objects.empty())
return;
qsort_descent_inplace(objects, 0, objects.size() - 1);
}
static void nms_sorted_bboxes(const std::vector<Object>& objects, std::vector<int>& picked, float nms_threshold, bool agnostic = false)
{
picked.clear();
const int n = objects.size();
std::vector<float> areas(n);
for (int i = 0; i < n; i++)
{
areas[i] = objects[i].rect.area();
}
for (int i = 0; i < n; i++)
{
const Object& a = objects[i];
int keep = 1;
for (int j = 0; j < (int)picked.size(); j++)
{
const Object& b = objects[picked[j]];
// if (!agnostic && a.label != b.label)
// continue;
// intersection over union
float inter_area = intersection_area(a, b);
float union_area = areas[i] + areas[picked[j]] - inter_area;
// float IoU = inter_area / union_area
if (inter_area / union_area > nms_threshold)
keep = 0;
}
if (keep)
picked.push_back(i);
}
}
static void generate_proposals_rt(int stride, const float* feat, float prob_threshold,
std::vector<Object>& objects,
int letterbox_cols, int letterbox_rows)
{
static const float anchors[18] = {10,13,16,30,33,23,30,61,62,45,59,119,116,90,156,198,373,326};
const int anchor_num = 3;
const int feat_w = letterbox_cols / stride;
const int feat_h = letterbox_rows / stride;
const int cls_num = CLASS_NUM;
const int mask_num = 32;
const int single_anchor_dim = cls_num + 5 + mask_num;
int anchor_group = 1;
if (stride == 8)
anchor_group = 1;
if (stride == 16)
anchor_group = 2;
if (stride == 32)
anchor_group = 3;
const float deprob_threshold = desigmoid(prob_threshold);
const int feat_size = feat_w * feat_h;
const int feat_size_cls_5_mask = feat_size * single_anchor_dim;
const float* anchor_data[3] = {
feat,
feat + feat_size_cls_5_mask,
feat + feat_size_cls_5_mask * 2
};
const int feat_size_4 = feat_size * 4;
const int feat_size_5 = feat_size * 5;
for (int a = 0; a < anchor_num; a++)
{
const float* anchor_ptr = anchor_data[a];
for (int h = 0; h < feat_h; h++)
{
const int h_offset = h * feat_w;
for (int w = 0; w < feat_w; w++)
{
const int loc_idx = (h_offset + w);
const float* pos_ptr = anchor_ptr + loc_idx;
// box score
const float box_score = *(pos_ptr + feat_size_4);
if (box_score < deprob_threshold)
continue;
// class score
int class_index = 0;
float max_score = -FLT_MAX;
float* class_score_ptr = (float*)pos_ptr + 5 * feat_size;
for (int s = 0; s < cls_num; s++) {
if (*class_score_ptr > max_score) {
class_index = s;
max_score = *class_score_ptr;
}
class_score_ptr += feat_size;
}
if (max_score < deprob_threshold)
continue;
const float sig_box_score = sigmoid(box_score);
const float sig_class_score = sigmoid(max_score);
const float final_score = sig_box_score * sig_class_score;
if (final_score < prob_threshold)
continue;
// get box info
const float dx = sigmoid(*pos_ptr);
const float dy = sigmoid(*(pos_ptr + feat_size));
const float dw = sigmoid(*(pos_ptr + 2 * feat_size));
const float dh = sigmoid(*(pos_ptr + 3 * feat_size));
const float pred_cx = (dx * 2.0f - 0.5f + w) * stride;
const float pred_cy = (dy * 2.0f - 0.5f + h) * stride;
float anchor_w = anchors[(anchor_group - 1) * 6 + a * 2 + 0];
float anchor_h = anchors[(anchor_group - 1) * 6 + a * 2 + 1];
const float pred_w = dw * dw * 4.0f * anchor_w;
const float pred_h = dh * dh * 4.0f * anchor_h;
Object obj;
obj.rect.x = pred_cx - pred_w * 0.5f;
obj.rect.y = pred_cy - pred_h * 0.5f;
obj.rect.width = pred_w;
obj.rect.height = pred_h;
obj.label = class_index;
obj.prob = final_score;
// get mask features
obj.mask_feat.resize(mask_num);
float* mask_feat_ptr = (float*)pos_ptr + (5 + cls_num) * feat_size;
for (int m = 0; m < mask_num; m++) {
obj.mask_feat[m] = *(mask_feat_ptr + m * feat_size);
}
objects.push_back(obj);
}
}
}
}
static int detect_yolov5_rt(const cv::Mat& bgr, std::vector<Object>& objects, float **output, float *proto){
std::chrono::steady_clock::time_point Tbegin, Tend;
Tbegin = std::chrono::steady_clock::now();
const float *p8_data_ptr = output[0];
const float *p16_data_ptr = output[1];
const float *p32_data_ptr = output[2];
// set default letterbox size
int letterbox_rows = LETTERBOX_ROWS;
int letterbox_cols = LETTERBOX_COLS;
/* postprocess */
const float prob_threshold = SCORE_THRESHOLD;
const float nms_threshold = NMS_THRESHOLD;
std::vector<Object> proposals;
std::vector<Object> objects8;
std::vector<Object> objects16;
std::vector<Object> objects32;
generate_proposals_rt(32, p32_data_ptr, prob_threshold, objects32, letterbox_cols, letterbox_rows);
proposals.insert(proposals.end(), objects32.begin(), objects32.end());
generate_proposals_rt(16, p16_data_ptr, prob_threshold, objects16, letterbox_cols, letterbox_rows);
proposals.insert(proposals.end(), objects16.begin(), objects16.end());
generate_proposals_rt( 8, p8_data_ptr, prob_threshold, objects8, letterbox_cols, letterbox_rows);
proposals.insert(proposals.end(), objects8.begin(), objects8.end());
qsort_descent_inplace(proposals);
std::vector<int> picked;
nms_sorted_bboxes(proposals, picked, nms_threshold);
float scale_letterbox;
int resize_rows;
int resize_cols;
if ((letterbox_rows * 1.0 / bgr.rows) < (letterbox_cols * 1.0 / bgr.cols))
{
scale_letterbox = letterbox_rows * 1.0 / bgr.rows;
}
else
{
scale_letterbox = letterbox_cols * 1.0 / bgr.cols;
}
resize_cols = int(scale_letterbox * bgr.cols);
resize_rows = int(scale_letterbox * bgr.rows);
int tmp_h = (letterbox_rows - resize_rows) / 2;
int tmp_w = (letterbox_cols - resize_cols) / 2;
float ratio_y = (float)bgr.rows / resize_rows;
float ratio_x = (float)bgr.cols / resize_cols;
int count = picked.size();
objects.resize(count);
for (int i = 0; i < count; i++)
{
objects[i] = proposals[picked[i]];
float x0 = (objects[i].rect.x);
float y0 = (objects[i].rect.y);
float x1 = (objects[i].rect.x + objects[i].rect.width);
float y1 = (objects[i].rect.y + objects[i].rect.height);
x0 = (x0 - tmp_w) * ratio_x;
y0 = (y0 - tmp_h) * ratio_y;
x1 = (x1 - tmp_w) * ratio_x;
y1 = (y1 - tmp_h) * ratio_y;
x0 = std::max(std::min(x0, (float)(bgr.cols - 1)), 0.f);
y0 = std::max(std::min(y0, (float)(bgr.rows - 1)), 0.f);
x1 = std::max(std::min(x1, (float)(bgr.cols - 1)), 0.f);
y1 = std::max(std::min(y1, (float)(bgr.rows - 1)), 0.f);
objects[i].rect.x = x0;
objects[i].rect.y = y0;
objects[i].rect.width = x1 - x0;
objects[i].rect.height = y1 - y0;
}
if (proto) {
int proto_c = 32;
int proto_h = 160;
int proto_w = 160;
cv::Mat mask_protos = cv::Mat(proto_c, proto_h * proto_w, CV_32FC1, const_cast<float*>(proto));
for (int i = 0; i < count; i++) {
Object& obj = objects[i];
cv::Mat mask_proposals = cv::Mat(1, proto_c, CV_32FC1, obj.mask_feat.data());
cv::Mat masks_feature = mask_proposals * mask_protos;
cv::Mat mask = masks_feature.reshape(1, proto_h);
cv::Mat ones_mat = cv::Mat::ones(mask.size(), CV_32FC1);
cv::exp(-mask, mask);
mask = ones_mat / (ones_mat + mask);
cv::resize(mask, mask, cv::Size(letterbox_cols, letterbox_rows));
cv::Rect valid_roi(tmp_w, tmp_h, resize_cols, resize_rows);
mask = mask(valid_roi).clone();
cv::resize(mask, mask, cv::Size(bgr.cols, bgr.rows));
cv::Rect bbox_roi(obj.rect.x, obj.rect.y, obj.rect.width, obj.rect.height);
bbox_roi.x = std::max(0, bbox_roi.x);
bbox_roi.y = std::max(0, bbox_roi.y);
bbox_roi.width = std::min(bgr.cols - bbox_roi.x, bbox_roi.width);
bbox_roi.height = std::min(bgr.rows - bbox_roi.y, bbox_roi.height);
if (bbox_roi.width > 0 && bbox_roi.height > 0) {
mask = mask(bbox_roi).clone();
cv::threshold(mask, obj.mask, MASK_THRESHOLD, 255, cv::THRESH_BINARY);
obj.mask.convertTo(obj.mask, CV_8UC1);
} else {
obj.mask = cv::Mat();
}
}
}
Tend = std::chrono::steady_clock::now();
float f = std::chrono::duration_cast <std::chrono::milliseconds> (Tend - Tbegin).count();
std::cout << "post process time : " << f << " ms" << std::endl;
fprintf(stderr, "detection num: %d\n", count);
return 0;
}
static void draw_objects(const cv::Mat& bgr, const std::vector<Object>& objects)
{
cv::Mat image = bgr.clone();
std::vector<cv::Scalar> colors(CLASS_NUM);
for (int i = 0; i < CLASS_NUM; i++)
colors[i] = cv::Scalar(rand()%256, rand()%256, rand()%256);
for (size_t i = 0; i < objects.size(); i++) {
const Object& obj = objects[i];
if (!obj.mask.empty()) {
cv::Rect original_rect = obj.rect;
if (original_rect.width != obj.mask.cols || original_rect.height != obj.mask.rows) {
original_rect.width = obj.mask.cols;
original_rect.height = obj.mask.rows;
original_rect.x = std::min(original_rect.x, image.cols - original_rect.width);
original_rect.y = std::min(original_rect.y, image.rows - original_rect.height);
original_rect.x = std::max(0, original_rect.x);
original_rect.y = std::max(0, original_rect.y);
}
cv::Mat mask_color(obj.mask.size(), CV_8UC3, colors[obj.label]);
cv::Mat masked_image;
cv::bitwise_and(mask_color, mask_color, masked_image, obj.mask);
cv::addWeighted(image(original_rect), 0.5, masked_image, 0.5, 0, image(original_rect));
}
fprintf(stderr, "%2d: %3.0f%%, [%4.0f, %4.0f, %4.0f, %4.0f], %s\n", obj.label, obj.prob * 100, obj.rect.x,
obj.rect.y, obj.rect.x + obj.rect.width, obj.rect.y + obj.rect.height, g_classes_name[obj.label].c_str());
cv::rectangle(image, obj.rect, cv::Scalar(255, 0, 0), 2);
char text[256];
sprintf(text, "%s %.1f%%", g_classes_name[obj.label].c_str(), obj.prob * 100);
int baseLine = 0;
cv::Size label_size = cv::getTextSize(text, cv::FONT_HERSHEY_SIMPLEX , 0.5, 1, &baseLine);
int x = obj.rect.x;
int y = obj.rect.y - label_size.height - baseLine;
if (y < 0)
y = 0;
if (x + label_size.width > image.cols)
x = image.cols - label_size.width;
cv::rectangle(image, cv::Rect(cv::Point(x, y), cv::Size(label_size.width, label_size.height + baseLine)),
cv::Scalar(255, 255, 255), -1);
cv::putText(image, text, cv::Point(x, y + label_size.height), cv::FONT_HERSHEY_SIMPLEX , 0.5,
cv::Scalar(0, 0, 0));
}
cv::imwrite("output_yolov5_seg.png", image);
}
int yolov5_seg_postprocess(const char *imagepath, float **output)
{
cv::Mat m = cv::imread(imagepath, 1);
if (m.empty()) return -1;
std::vector<Object> objects;
detect_yolov5_rt(m, objects, output, output[3]); // output[3]为原型掩码
draw_objects(m, objects);
return 0;
}
主函数:main()
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/time.h>
#include "npulib.h"
#include "model_config.h"
/*-------------------------------------------
Macros and Variables
-------------------------------------------*/
extern int yolov5_seg_preprocess(const char* imagepath, void* buff_ptr, unsigned int buff_size);
extern int yolov5_seg_postprocess(const char *imagepath, float **output);
const char *usage =
"model_demo -nb modle_path -i input_path -l loop_run_count -m malloc_mbyte \n"
"-nb modle_path: the NBG file path.\n"
"-i input_path: the input file path.\n"
"-l loop_run_count: the number of loop run network.\n"
"-m malloc_mbyte: npu_unit init memory Mbytes.\n"
"-h : help\n"
"example: model_demo -nb model.nb -i input.tensor -l 10 -m 20 \n";
enum time_idx_e {
NPU_INIT = 0,
NETWORK_CREATE,
NETWORK_PREPARE,
NETWORK_PREPROCESS,
NETWORK_RUN,
NETWORK_LOOP,
TIME_IDX_MAX = 9
};
#if defined(__linux__)
#define TIME_SLOTS 10
static uint64_t time_begin[TIME_SLOTS];
static uint64_t time_end[TIME_SLOTS];
static uint64_t GetTime(void)
{
struct timeval time;
gettimeofday(&time, NULL);
return (uint64_t)(time.tv_usec + time.tv_sec * 1000000);
}
static void TimeBegin(int id)
{
time_begin[id] = GetTime();
}
static void TimeEnd(int id)
{
time_end[id] = GetTime();
}
static uint64_t TimeGet(int id)
{
return time_end[id] - time_begin[id];
}
#endif
int main(int argc, char** argv)
{
int status = 0;
int i = 0;
unsigned int count = 0;
long long total_infer_time = 0;
char *model_file = nullptr;
char *input_file = nullptr;
unsigned int loop_count = 1;
if (argc < 2) {
printf("%s\n", usage);
return -1;
}
for (i = 0; i< argc; i++) {
if (!strcmp(argv[i], "-nb")) {
model_file = argv[++i];
}
else if (!strcmp(argv[i], "-i")) {
input_file = argv[++i];
}
else if (!strcmp(argv[i], "-l")) {
loop_count = atoi(argv[++i]);
}
else if (!strcmp(argv[i], "-h")) {
printf("%s\n", usage);
return 0;
}
}
printf("model_file=%s, input=%s, loop_count=%d \n", model_file, input_file, loop_count);
if (model_file == nullptr)
return -1;
/* NPU init*/
NpuUint npu_uint;
int ret = npu_uint.npu_init();
if (ret != 0) {
return -1;
}
NetworkItem yolov5;
unsigned int network_id = 0;
status = yolov5.network_create(model_file, network_id);
if (status != 0) {
printf("network %d create failed.\n", network_id);
return -1;
}
status = yolov5.network_prepare();
if (status != 0) {
printf("network prepare fail, status=%d\n", status);
return -1;
}
TimeBegin(NETWORK_PREPROCESS);
// input jpg file, no copy way
void *input_buffer_ptr = nullptr;
unsigned int input_buffer_size = 0;
yolov5.get_network_input_buff_info(0, &input_buffer_ptr, &input_buffer_size);
printf("buffer ptr: %p, buffer size: %d \n", input_buffer_ptr, input_buffer_size);
yolov5_seg_preprocess(input_file, input_buffer_ptr, input_buffer_size);
TimeEnd(NETWORK_PREPROCESS);
printf("feed input cost: %lu us.\n", (unsigned long)TimeGet(NETWORK_PREPROCESS));
// create yolov5 output buffer
int output_cnt = yolov5.get_output_cnt(); // network output count
float **output_data = new float*[output_cnt]();
for (int i = 0; i < output_cnt; i++)
output_data[i] = new float[yolov5.m_output_data_len[i]];
i = 0;
/* run network */
TimeBegin(NETWORK_LOOP);
while (count < loop_count) {
count++;
printf("network: %d, loop count: %d\n", i, count);
status = yolov5.network_input_output_set();
if (status != 0) {
printf("set network input/output %d failed.\n", i);
return -1;
}
#if defined (__linux__)
TimeBegin(NETWORK_RUN);
#endif
status = yolov5.network_run();
if (status != 0) {
printf("fail to run network, status=%d, batchCount=%d\n", status, i);
return -2;
}
#if defined (__linux__)
TimeEnd(NETWORK_RUN);
printf("run time for this network %d: %lu us.\n", i, (unsigned long)TimeGet(NETWORK_RUN));
#endif
total_infer_time += (unsigned long)TimeGet(NETWORK_RUN);
yolov5.get_output(output_data);
yolov5_seg_postprocess(input_file, output_data);
}
TimeEnd(NETWORK_LOOP);
if (loop_count > 1) {
printf("network: %d, this network run avg inference time=%d us, total avg cost: %d us\n", i,
(uint32_t)(total_infer_time / loop_count), (unsigned int)(TimeGet(NETWORK_LOOP) / loop_count));
}
// free output buffer
for (int i = 0; i < output_cnt; i++) {
delete[] output_data[i];
output_data[i] = nullptr;
}
if (output_data != nullptr)
delete[] output_data;
return ret;
}
模型转换
后续的一系列和其他模型一样,这里就直接给出转换的命令了,详细的说明可以参考yolox的部署,或者《NPU_模型部署_开发指南》
# using xxx_env.sh to create softlink
./convert_model_env.sh
# 导入
# pegasus_import.sh <model_name>
./pegasus_import.sh yolov5s-seg_rt
# 量化
# pegasus_quantize.sh <model_name> <quantize_type> <calibration_set_size>
./pegasus_quantize.sh yolov5s-seg_rt uint8 12
# 仿真(可选)
# pegasus_inference.sh <model_name> <quantize_type>
./pegasus_inference.sh yolov5s-seg_rt uint8
# 导出nb模型
# pegasus_export_ovx_nbg.sh <model_name> <quantize_type> <platform>
./pegasus_export_ovx_nbg.sh yolov5s-seg_rt uint8 t736
# 导出的模型文件存放在../model目录
# 例如 ../model/yolov5s-seg_rt_uint8_t736.nb编译、推理
这里以在Linux系统下进行编译推理,Android系统参考yolox的部署,这里直接给出命令行,根据自己的平台和系统进行修改就行了。
# 进入yolov5_seg目录,进行编译
cd ../examples/yolov5_seg/
./../build_linux.sh -t t736在examples目录下生成install目录,推送yolov5_seg_demo_linux_t736文件至板端,方式有多种,这里使用adb
adb push install\yolov5_seg_demo_linux_t736 /mnt/UDISK/进入板端相应的文件进行推理
# 运行可执行文件
# ./yolov5_seg_demo_t736 -h 查看执行示例说明
chmod +x ./yolov5_seg_demo_t736
./yolov5_seg_demo_t736 -nb model/yolov5s-seg_rt_uint8_t736.nb -i model/bus.jpg输出结果
detection num: 5
0: 85%, [ 216, 408, 354, 860], person
0: 83%, [ 57, 395, 241, 909], person
0: 82%, [ 665, 391, 809, 873], person
5: 77%, [ 11, 229, 804, 775], bus
0: 45%, [ 4, 543, 77, 890], person
destory npu finished.
~NpuUint.


AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 9
9 0
0- 0



 已为社区贡献7条内容
已为社区贡献7条内容

所有评论(0)