基于LQR的主动前轮转向(AFS)车辆稳定性控制策略与动力学参考模型优化
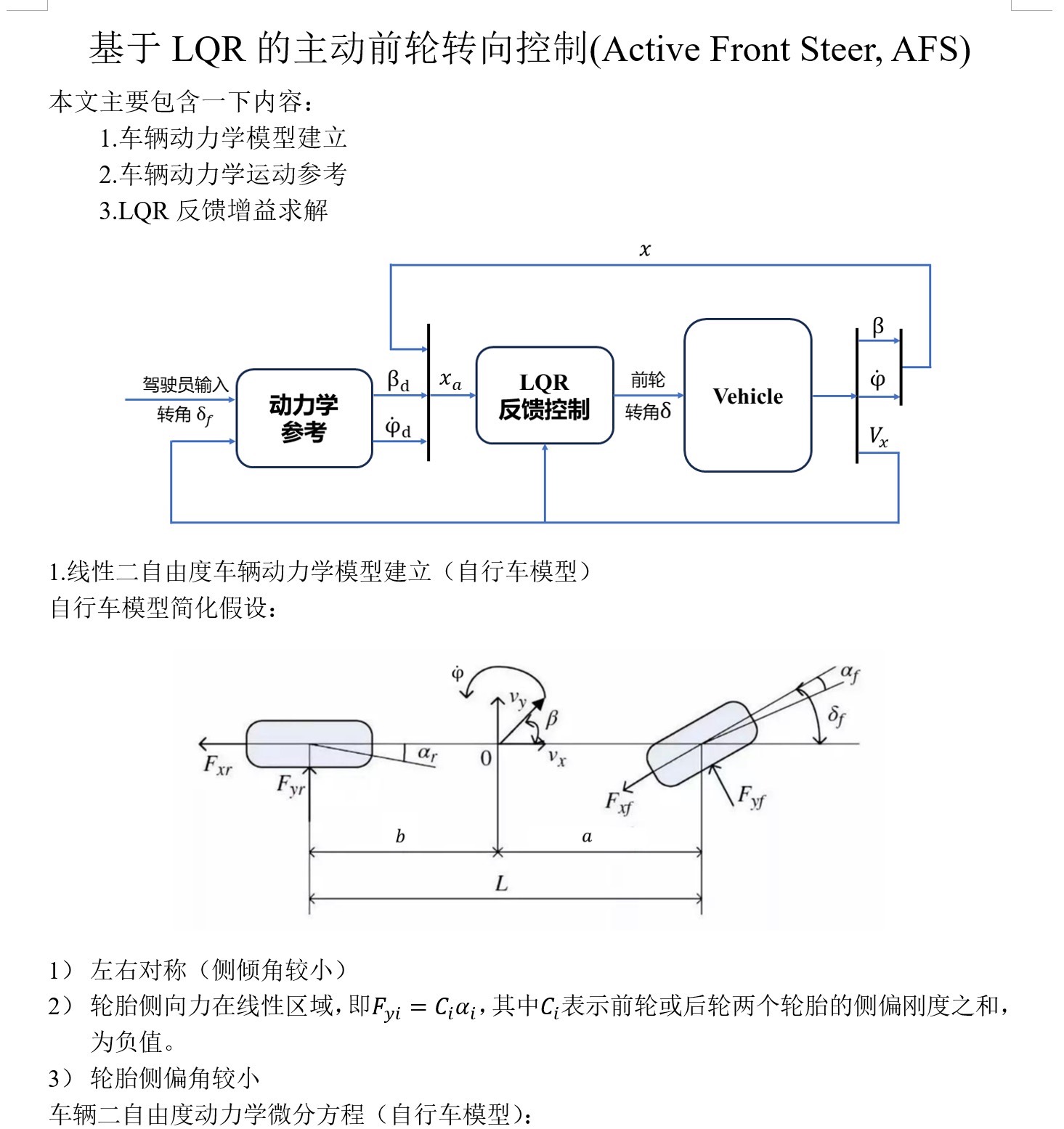
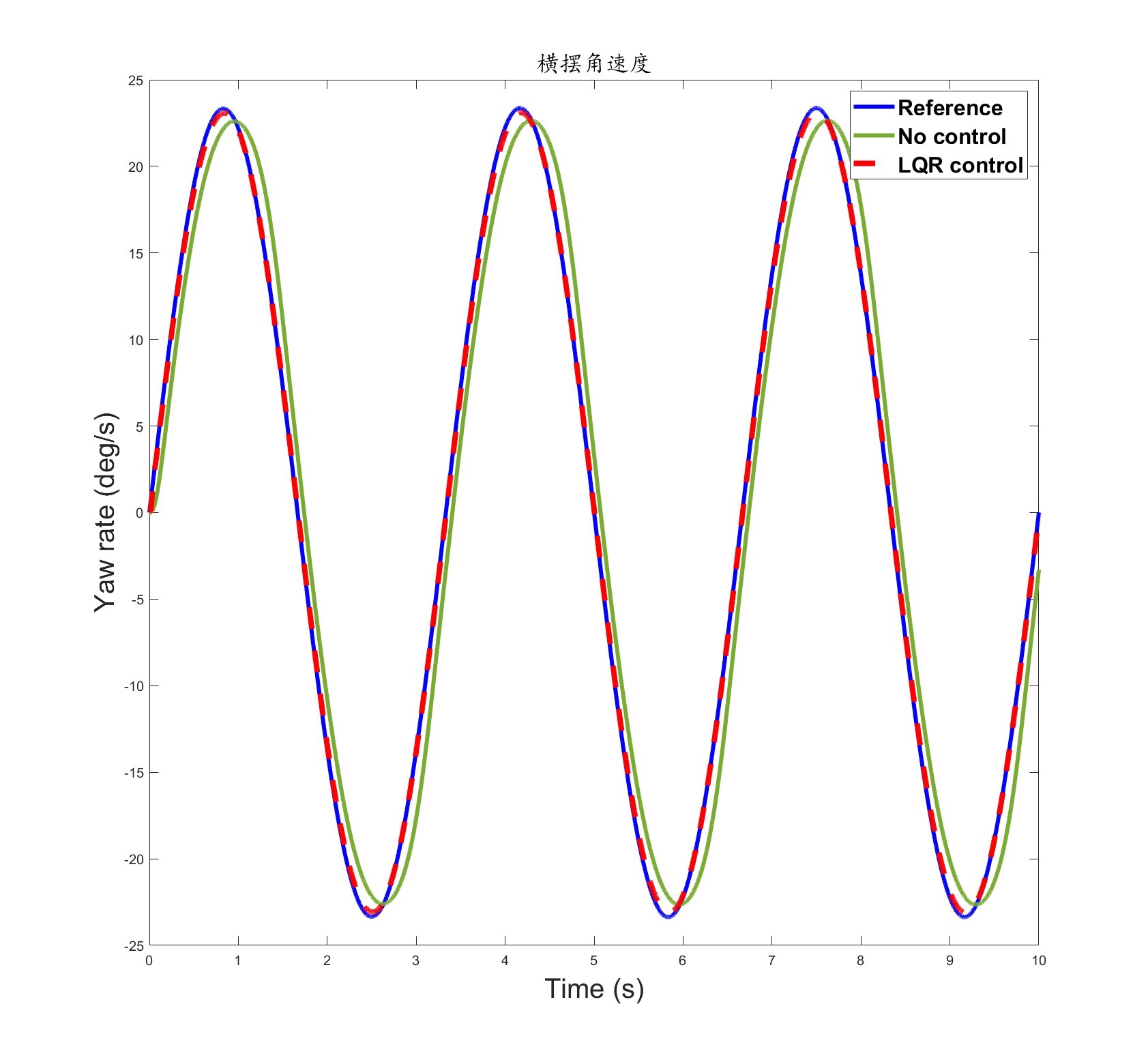
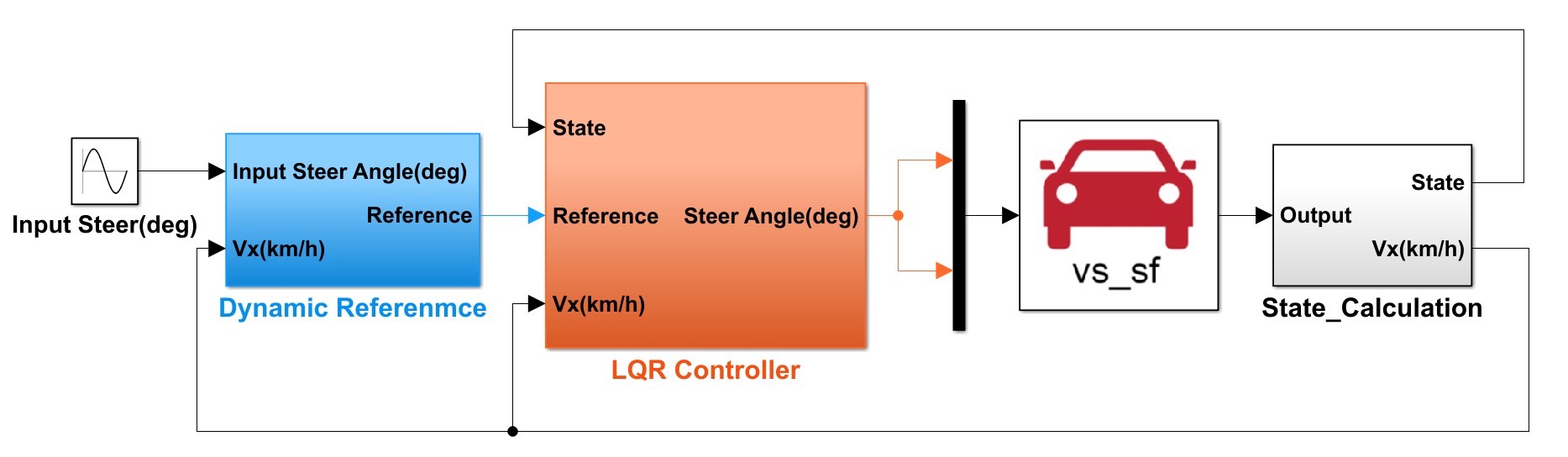
基于LQR的主动前轮转向(AFS)车辆稳定性控制(ESC) 主动前轮转向(Active Front Steer,AFS)通过控制系统在驾驶员输入的基础上,附加一个前轮转角从而提高车辆的操纵性以及稳定性。 而LQR控制是最优控制的一种,不仅控制效果好,鲁棒性强,同时运行速度快,被广泛应用。 此模型基于LQR开发了AFS控制器,通过编写离散LQR最优反馈增益求解算法,预先离线计算出不同车辆状态的反馈增益,可以提高控制器运行时的速度和控制效果。 使用侧重机动性为目标的动力学参考,这可以有效的改善车辆的运动性能。 原理图如图6所示。 资料中有matlab代码,simulink模型和介绍资料(自制),资料包括模型建立的全部内容,包括模型建立,动力学运动参考和离散LQR反馈增益的推导求解过程。 通过Carsim-Simulink联合仿真验证算法的控制效果。
在现代汽车工程中,主动前轮转向(AFS)技术通过在前轮转角上增加一个控制系统,显著提升了车辆的操纵性和稳定性。而要实现这一目标,LQR(线性二次型调节器)控制算法提供了一个强有力的工具。今天,我们就来聊聊如何基于LQR开发一个AFS控制器,并通过Carsim-Simulink联合仿真来验证其效果。
首先,LQR控制算法的核心在于其能够提供最优的控制效果,同时具备良好的鲁棒性和快速运行的特点。在我们的AFS控制器中,我们首先需要编写一个离散LQR最优反馈增益求解算法。这个算法的目的是预先计算出不同车辆状态下的反馈增益,这样在实际控制过程中,控制器可以快速响应,提高控制效果。
让我们来看一段MATLAB代码,这段代码展示了如何实现离散LQR反馈增益的求解:
function K = discreteLQR(A, B, Q, R)
% 解离散时间LQR问题
% A, B是系统矩阵,Q, R是权重矩阵
[K, S, e] = dlqr(A, B, Q, R);
end在这段代码中,A和B是描述车辆动态的系统矩阵,Q和R是权重矩阵,用于调整控制器的性能。通过调用dlqr函数,我们可以得到最优反馈增益矩阵K,这个矩阵将用于后续的控制过程中。
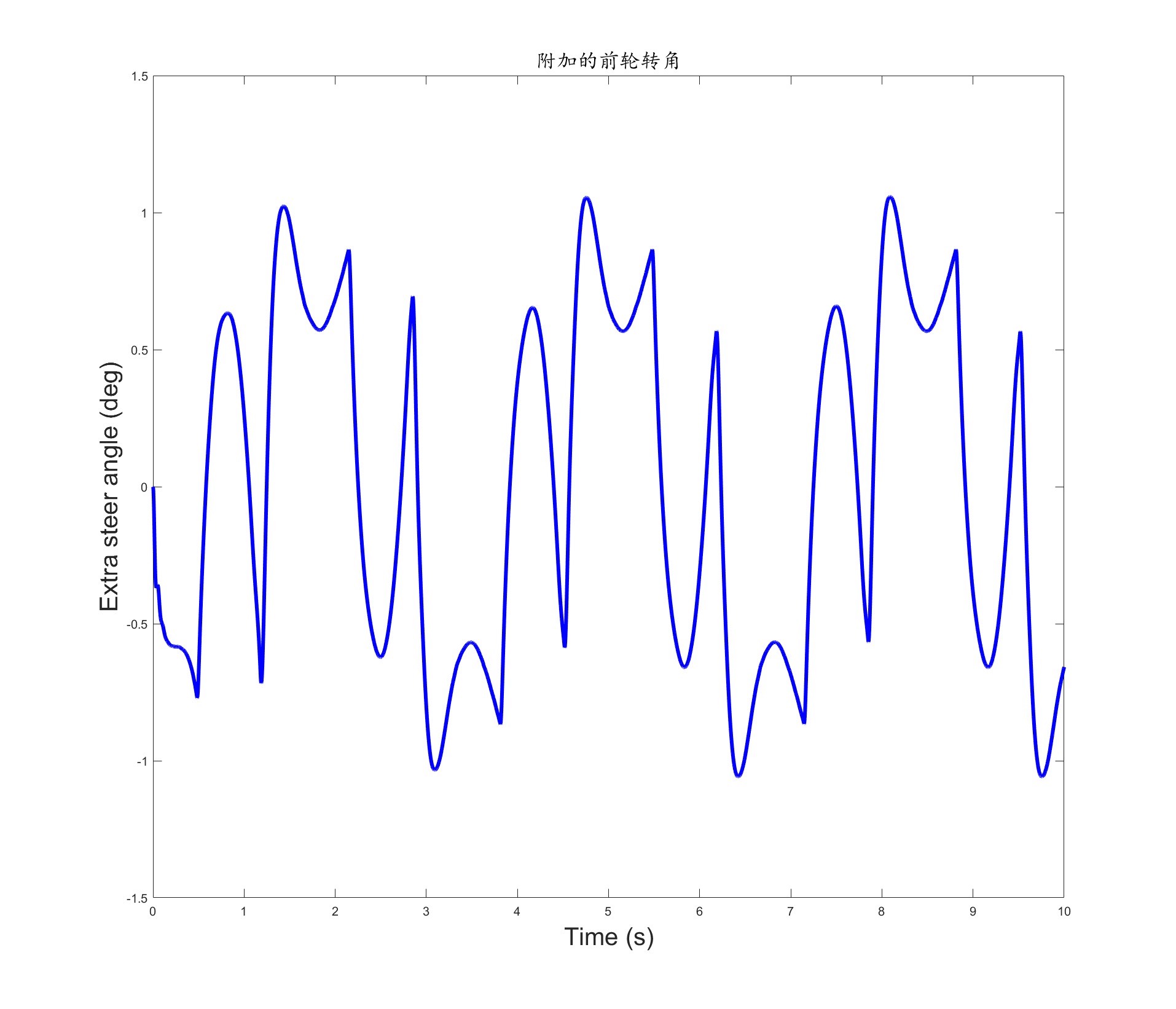
基于LQR的主动前轮转向(AFS)车辆稳定性控制(ESC) 主动前轮转向(Active Front Steer,AFS)通过控制系统在驾驶员输入的基础上,附加一个前轮转角从而提高车辆的操纵性以及稳定性。 而LQR控制是最优控制的一种,不仅控制效果好,鲁棒性强,同时运行速度快,被广泛应用。 此模型基于LQR开发了AFS控制器,通过编写离散LQR最优反馈增益求解算法,预先离线计算出不同车辆状态的反馈增益,可以提高控制器运行时的速度和控制效果。 使用侧重机动性为目标的动力学参考,这可以有效的改善车辆的运动性能。 原理图如图6所示。 资料中有matlab代码,simulink模型和介绍资料(自制),资料包括模型建立的全部内容,包括模型建立,动力学运动参考和离散LQR反馈增益的推导求解过程。 通过Carsim-Simulink联合仿真验证算法的控制效果。
接下来,我们需要将这个LQR控制器集成到Simulink模型中。Simulink提供了一个直观的图形化界面,使得我们可以轻松地将控制算法与车辆模型结合起来。在Simulink中,我们可以设置不同的车辆状态和输入条件,通过Carsim进行联合仿真,来验证我们的AFS控制器的实际效果。
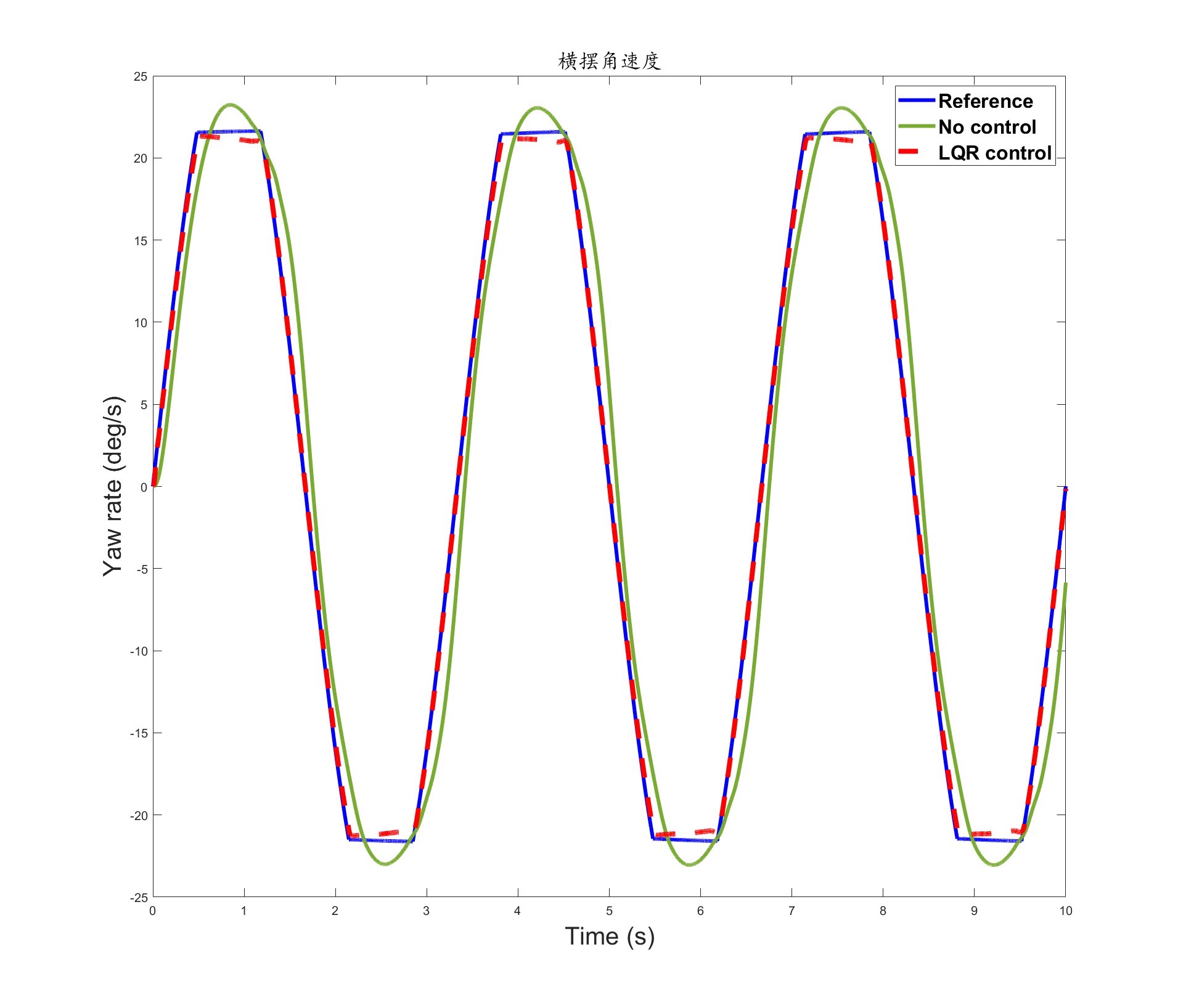
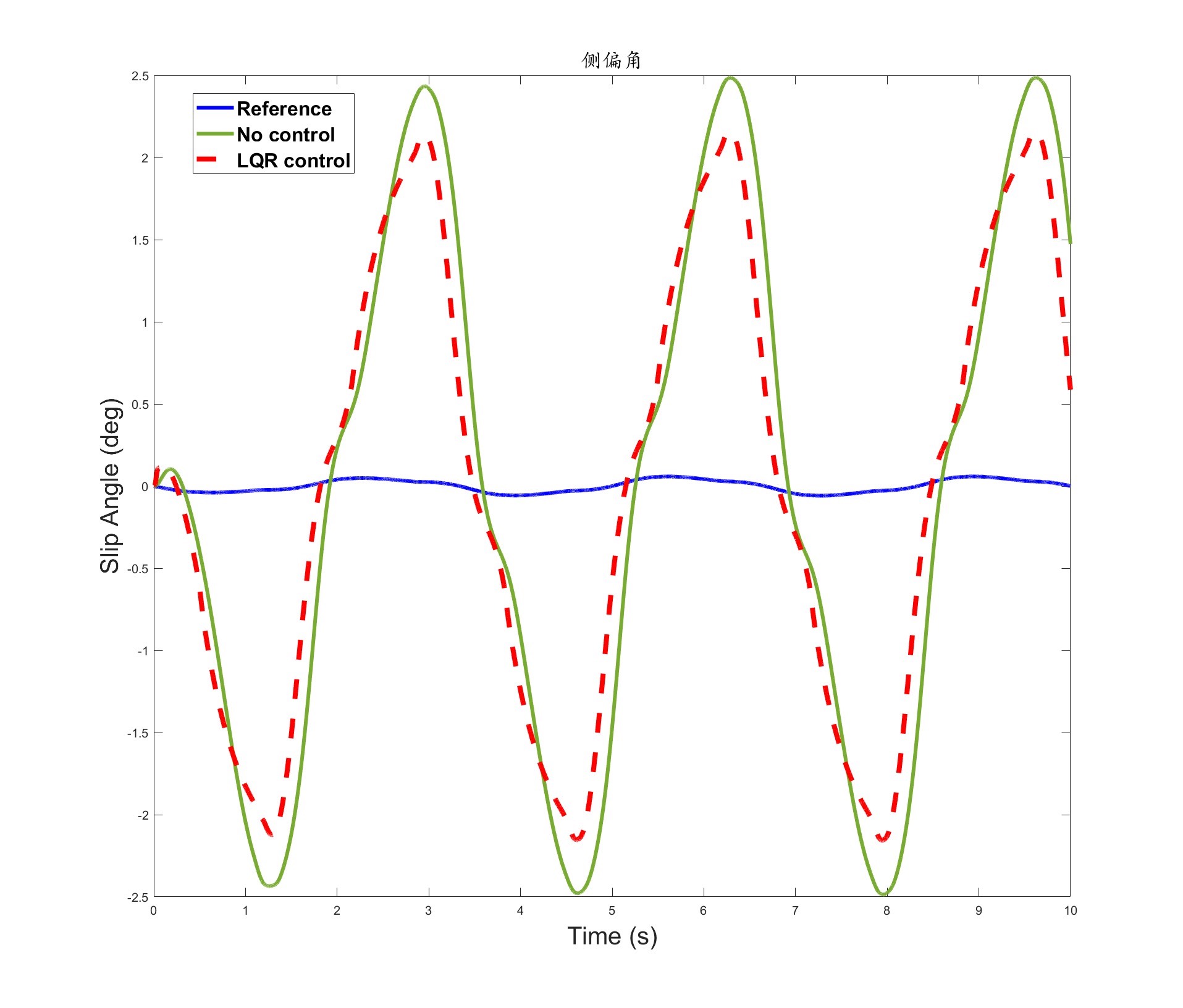
在仿真过程中,我们可以观察到车辆在不同驾驶条件下的动态响应。例如,在高速行驶时,AFS控制器如何通过调整前轮转角来保持车辆的稳定性;在紧急避让情况下,控制器如何快速响应,提高车辆的操纵性。
通过这种方式,我们不仅能够验证LQR控制算法在AFS应用中的有效性,还能够根据仿真结果进一步优化控制器的参数,以达到更好的控制效果。
总之,基于LQR的主动前轮转向控制技术,通过其高效和鲁棒的控制算法,为现代车辆提供了更高的安全性和驾驶体验。通过MATLAB和Simulink的强大工具,我们能够快速开发和验证这些先进的控制策略,推动汽车工程技术的不断进步。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 7
7 0
0- 0



 已为社区贡献47条内容
已为社区贡献47条内容

所有评论(0)