线性时变模型预测控制LTV - MPC的Matlab + Simulink仿真之旅
线性时变模型预测控制LTV-MPC Matlab+simulink仿真(2020b) 线性时变系统(传递函数 单入单出) 包含:1:代码部分:隐式mpc 自适应mpc 时变mpc,三种mpc的闭环仿真 2:基于simulink的时变mpc仿真
在控制系统领域,线性时变模型预测控制(LTV - MPC)是一种强大的工具,今天就来和大家分享下在Matlab 2020b环境下,如何实现相关的仿真。
线性时变系统简介
我们处理的是单入单出的线性时变系统,通过传递函数来描述。这种系统与传统线性时不变系统不同,其参数会随着时间变化,这给控制带来了新的挑战,但同时也提供了适应动态环境的能力。
代码部分
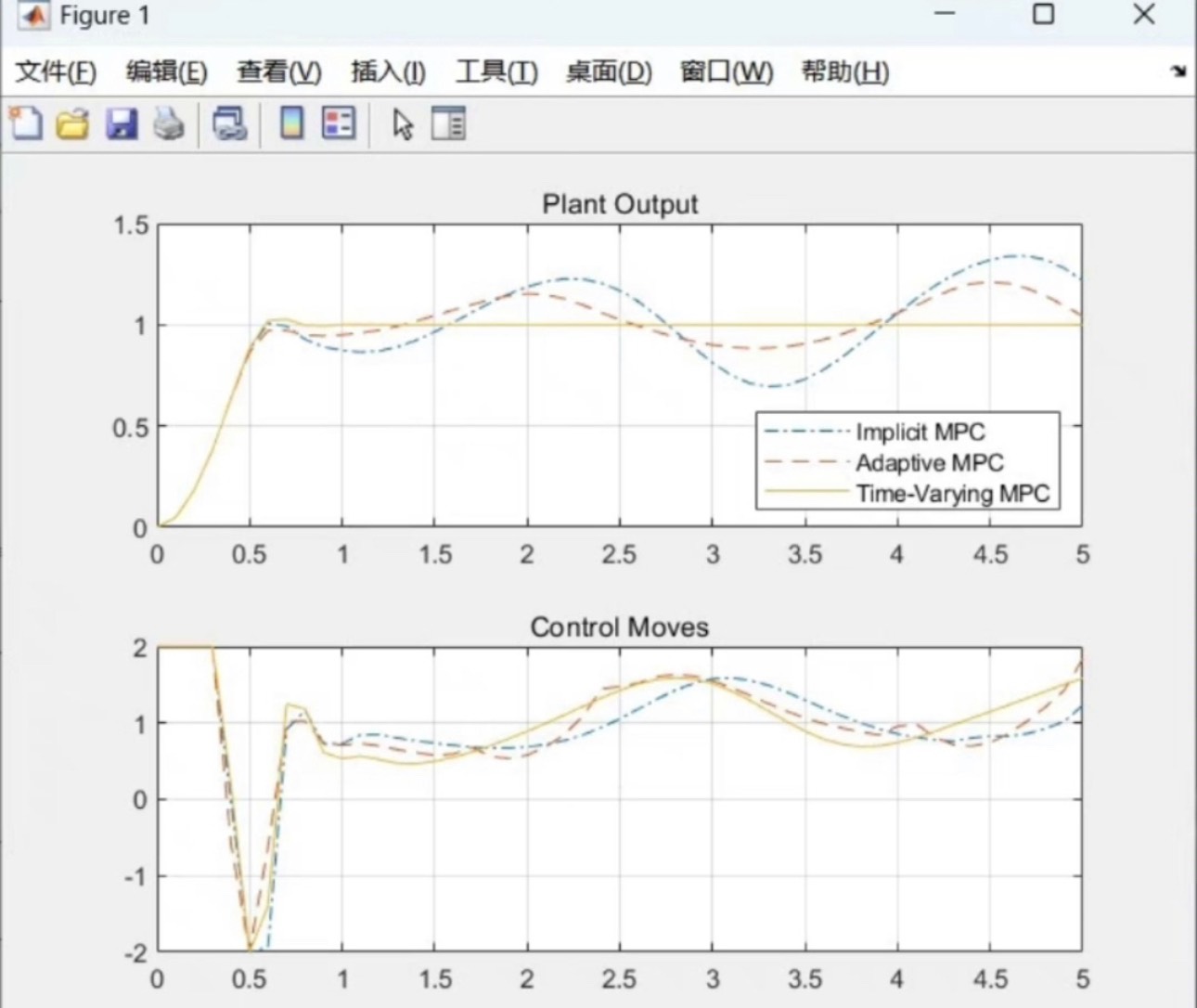
隐式MPC
隐式MPC是MPC中的一种重要实现方式。下面是一段简单的Matlab代码示例(这里仅为示意,实际应用需根据具体系统调整):
% 系统参数设定
A = [1 0.1; 0 1];
B = [0.1; 1];
C = [1 0];
sys = ss(A, B, C, 0);
% 隐式MPC控制器参数
Np = 10; % 预测时域
Nu = 5; % 控制时域
Q = eye(1); % 状态权重矩阵
R = 0.1; % 控制输入权重矩阵
% 设计隐式MPC控制器
mpcController = mpc(sys, Np, Nu, Q, R);
% 闭环仿真
t = 0:0.1:10;
u = zeros(size(t));
y = zeros(size(t));
x = [0; 0];
for k = 1:length(t)
[u(k), ~, ~] = predict(mpcController, y(k), x);
y(k+1) = C * x + D * u(k);
x = A * x + B * u(k);
end代码分析:首先,我们定义了系统的状态空间矩阵 A、B、C 和 D(这里 D 为0),构建了系统模型 sys。接着设置隐式MPC控制器的关键参数,如预测时域 Np、控制时域 Nu,以及权重矩阵 Q 和 R。权重矩阵决定了对状态跟踪和控制输入变化的重视程度。之后通过 mpc 函数设计出隐式MPC控制器。最后在闭环仿真部分,我们迭代计算控制输入 u 和系统输出 y,模拟系统在隐式MPC控制下的运行情况。
自适应MPC
自适应MPC能够根据系统运行情况动态调整控制策略。代码如下:
% 系统参数设定(假设时变参数)
A = @(t) [1 0.1*t; 0 1];
B = [0.1; 1];
C = [1 0];
% 自适应MPC参数
Np = 10;
Nu = 5;
Q = eye(1);
R = 0.1;
% 初始化
t = 0:0.1:10;
u = zeros(size(t));
y = zeros(size(t));
x = [0; 0];
for k = 1:length(t)
Ak = A(t(k));
sys = ss(Ak, B, C, 0);
mpcController = mpc(sys, Np, Nu, Q, R);
[u(k), ~, ~] = predict(mpcController, y(k), x);
y(k+1) = C * x + D * u(k);
x = Ak * x + B * u(k);
end代码分析:这里系统矩阵 A 是一个关于时间 t 的函数,体现了系统的时变特性。在每次迭代中,根据当前时间 t(k) 重新构建系统模型 sys,并设计新的MPC控制器。这样,控制器就能自适应系统参数的变化,实现更好的控制效果。
时变MPC
时变MPC与自适应MPC有相似之处,但更侧重于对时变系统的直接处理。
% 时变系统参数
A1 = [1 0.1; 0 1];
A2 = [1 0.2; 0 1];
B = [0.1; 1];
C = [1 0];
% 时变MPC参数
Np = 10;
Nu = 5;
Q = eye(1);
R = 0.1;
% 仿真时间
t = 0:0.1:10;
u = zeros(size(t));
y = zeros(size(t));
x = [0; 0];
for k = 1:length(t)
if t(k) < 5
Ak = A1;
else
Ak = A2;
end
sys = ss(Ak, B, C, 0);
mpcController = mpc(sys, Np, Nu, Q, R);
[u(k), ~, ~] = predict(mpcController, y(k), x);
y(k+1) = C * x + D * u(k);
x = Ak * x + B * u(k);
end代码分析:此代码中系统矩阵 A 在时间 t = 5 时发生变化。在仿真过程中,根据时间判断使用哪个 A 矩阵构建系统模型,进而设计时变MPC控制器。这种方式能有效应对系统参数在特定时间点的突变。
基于Simulink的时变MPC仿真
在Simulink中搭建时变MPC仿真模型也是非常直观的。首先,我们要在Simulink库中找到相关模块,比如状态空间模块用于描述线性时变系统,MPC Controller模块用于实现MPC控制算法。
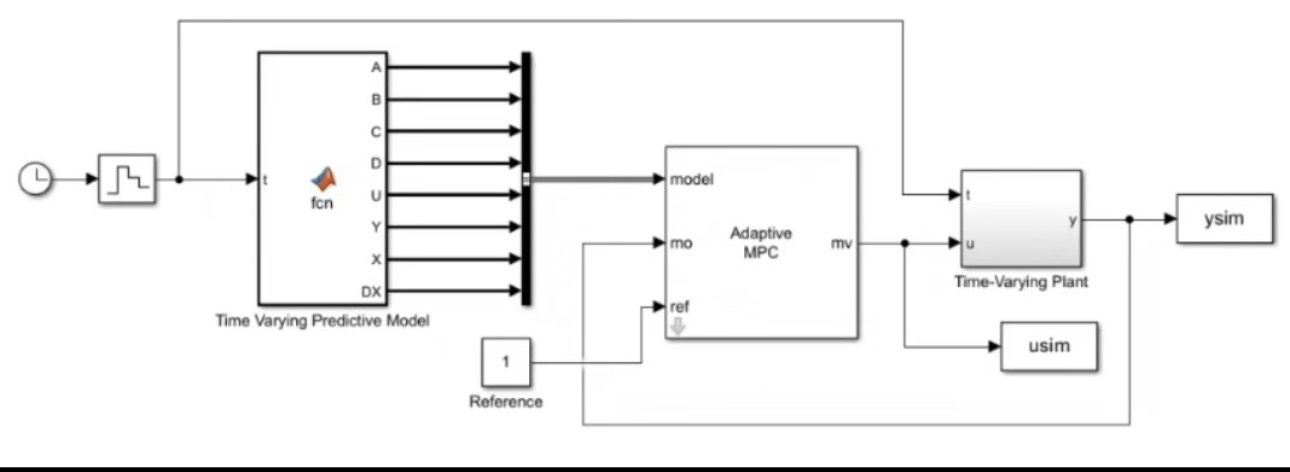
将状态空间模块的参数根据我们的线性时变系统进行设置,例如时变的 A 矩阵可以通过一个随时间变化的信号源来控制。MPC Controller模块则需要设置预测时域、控制时域以及权重矩阵等参数,与代码中的设置相对应。
线性时变模型预测控制LTV-MPC Matlab+simulink仿真(2020b) 线性时变系统(传递函数 单入单出) 包含:1:代码部分:隐式mpc 自适应mpc 时变mpc,三种mpc的闭环仿真 2:基于simulink的时变mpc仿真
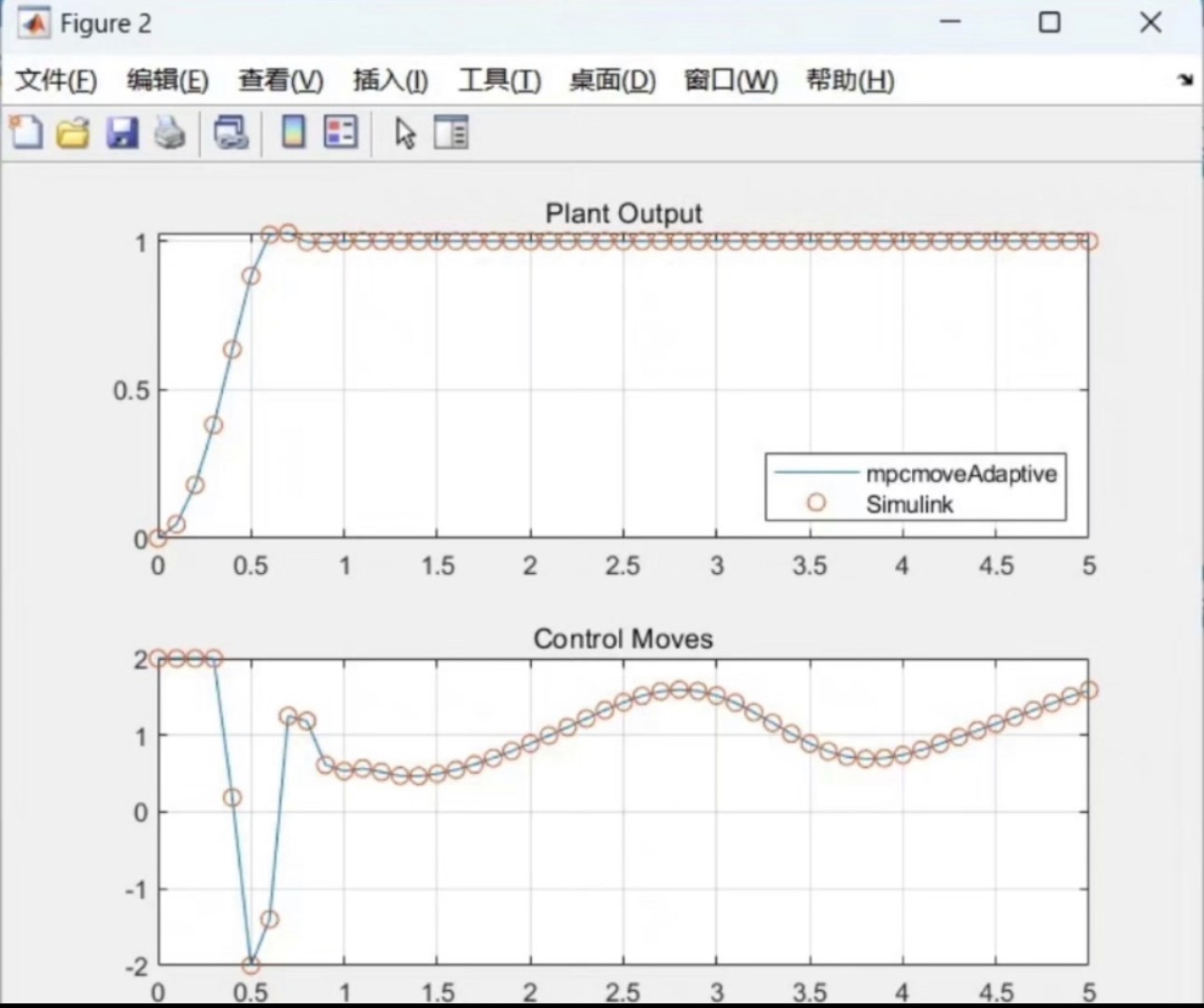
连接好各个模块后,设置仿真时间和步长,就可以运行仿真了。通过观察示波器等显示模块,我们能直观看到系统输出和控制输入随时间的变化情况,与代码仿真结果相互验证。
线性时变模型预测控制在实际应用中有广泛的前景,无论是代码实现还是Simulink仿真,都为我们深入理解和应用这一技术提供了有力的手段。希望大家通过这篇博文,对LTV - MPC的Matlab + Simulink仿真有更清晰的认识,一起探索更多控制领域的奥秘!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 9
9 0
0- 0



 已为社区贡献52条内容
已为社区贡献52条内容

所有评论(0)