联合仿真模型验证:Carsim + 车辆动力学模型(十四自由度)实践
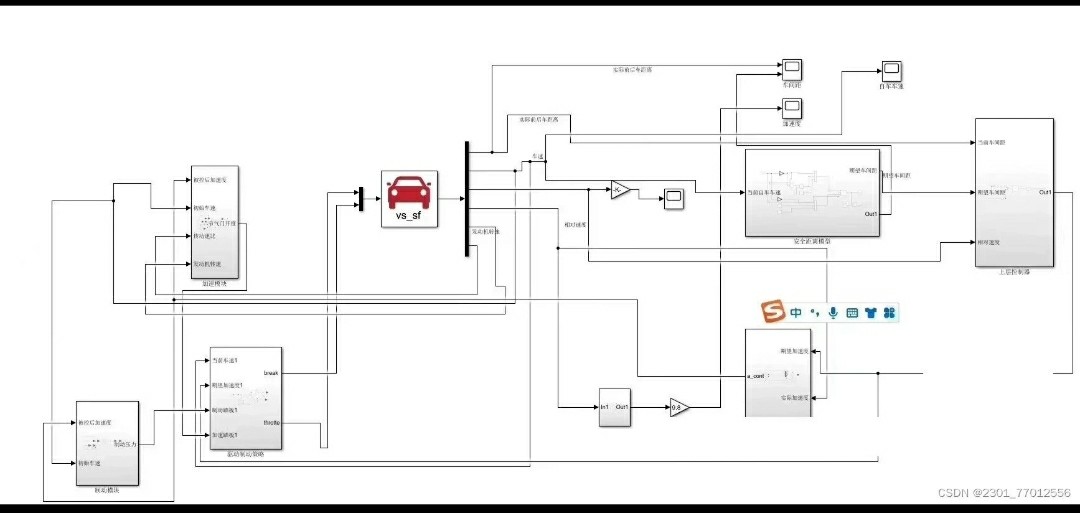
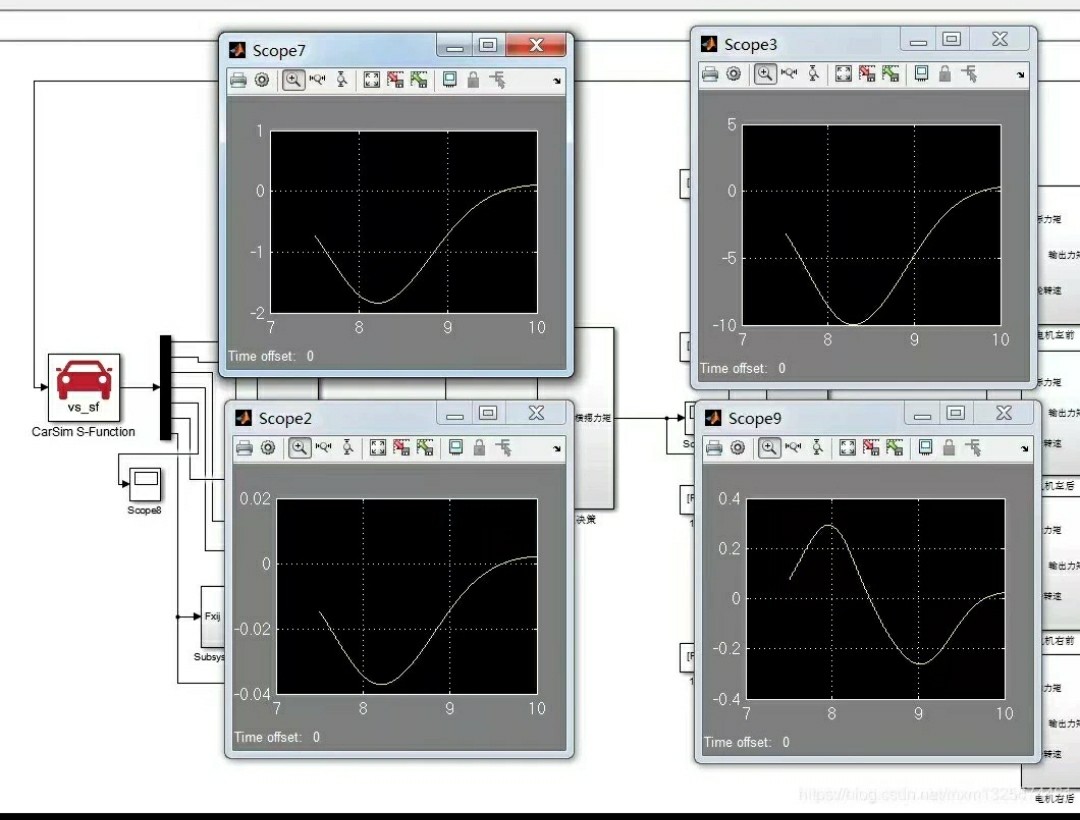
联合仿真模型验证Carsim+车辆动力学模型(十四自由度) 软件使用:Carsim2019.0+Matlab/Simulink 适用场景:采用模块化建模方法,搭建14自由度整车模型,将此模型与carsim进行联合仿真模型验证。 (模型和 carsim存在一定误差) 产品 simulink源码包含如下模块:工况:阶跃工况,正弦输入 整车模块:14自由度整车模型+ carsim的cpar文件包含模块:转向系统,整车系统,悬架系统,魔术轮胎,车轮系统,PI驾驶员控制模块等 十四自由度包含:整车纵向,横向,横摆,车身俯仰,侧倾,垂向跳动,车轮的四轮旋转和垂向自由度,每个自由度的数据都可在simulink当中实时查看。
在车辆动力学研究领域,为了更精准地模拟车辆在各种工况下的运行状态,联合仿真技术成为了一种强有力的工具。这次就来聊聊使用Carsim2019.0和Matlab/Simulink进行联合仿真,验证十四自由度车辆动力学模型的过程。
适用场景与建模方法
采用模块化建模方法搭建14自由度整车模型,这可不是个简单活儿。每个模块都有其独特的作用,就像汽车的各个零部件,协同工作才能让车辆跑起来。我们把这个精心搭建的模型与Carsim结合,进行联合仿真模型验证。不过得注意,模型和Carsim之间会存在一定误差,这也是我们在验证过程中需要重点关注和分析的点。
Simulink源码模块剖析
- 工况模块
包含阶跃工况和正弦输入。以阶跃工况为例,在Simulink里实现它的代码可能长这样:
% 阶跃工况模拟
time = 0:0.01:10; % 时间范围0到10秒,步长0.01秒
input_signal = ones(size(time)); % 生成幅值为1的阶跃信号
step_signal = [time; input_signal]; % 组合时间和信号这里通过简单的代码生成了一个在0时刻幅值从0跳变到1并保持的阶跃信号,用来模拟车辆行驶过程中突然的输入变化,比如突然踩下油门或者刹车。正弦输入则是模拟周期性的输入,像车辆在颠簸路面行驶时的振动输入。
- 整车模块
- 14自由度整车模型:这个模型可复杂了,它涵盖了整车纵向、横向、横摆、车身俯仰、侧倾、垂向跳动,以及车轮的四轮旋转和垂向自由度。每个自由度的数据都能在Simulink中实时查看,方便我们随时掌握车辆模型的动态变化。
- Carsim的cpar文件包含模块:转向系统,控制车辆行驶方向,就像人的方向盘。整车系统整合各个部分,让车辆成为一个有机整体。悬架系统起到缓冲和支撑作用,魔术轮胎模型则更精准地模拟轮胎与地面的相互作用,车轮系统包含车轮的各种参数设置。还有PI驾驶员控制模块,模拟驾驶员的操作。
以转向系统为例,在Simulink中搭建的一个简单的转向控制模块代码可能如下:
% 转向系统简单控制
Kp = 1; % 比例系数
Ki = 0.1; % 积分系数
error = desired_angle - current_angle; % 期望角度与当前角度的误差
integral = integral + error * dt; % 积分项
steering_command = Kp * error + Ki * integral; % PI控制输出转向指令这里通过PI控制算法,根据期望转向角度和当前实际转向角度的误差,计算出转向指令,控制车辆的转向动作。
联合仿真的意义与挑战
通过联合仿真,我们可以将Matlab/Simulink强大的算法设计和数据处理能力与Carsim高精度的车辆动力学模型相结合。然而,正如前面提到的,模型与Carsim之间存在误差。这就需要我们在仿真过程中仔细分析每个自由度的数据,查看在不同工况下模型与Carsim的差异,不断调整和优化我们的14自由度整车模型,让它尽可能接近真实的车辆动力学特性。
联合仿真模型验证Carsim+车辆动力学模型(十四自由度) 软件使用:Carsim2019.0+Matlab/Simulink 适用场景:采用模块化建模方法,搭建14自由度整车模型,将此模型与carsim进行联合仿真模型验证。 (模型和 carsim存在一定误差) 产品 simulink源码包含如下模块:工况:阶跃工况,正弦输入 整车模块:14自由度整车模型+ carsim的cpar文件包含模块:转向系统,整车系统,悬架系统,魔术轮胎,车轮系统,PI驾驶员控制模块等 十四自由度包含:整车纵向,横向,横摆,车身俯仰,侧倾,垂向跳动,车轮的四轮旋转和垂向自由度,每个自由度的数据都可在simulink当中实时查看。
总之,Carsim与14自由度车辆动力学模型的联合仿真,虽然充满挑战,但为我们深入研究车辆动力学提供了一个非常有效的途径,让我们能更好地理解车辆在复杂工况下的行为,为车辆设计和优化提供有力支持。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 11
11 0
0- 0



 已为社区贡献64条内容
已为社区贡献64条内容

所有评论(0)