基于BP神经网络PI的永磁同步电机控制探索
基于BP神经网络PI的永磁同步电机控制【提供参考资料】【有模 型对比】 一、算法简介 利用BP神经网络对永磁同步电机的速度环PI进行调整,增强控制的抗干扰性。 BP神经网络采用梯度下降法寻优,调整依据为转速与给定值的误差,可根据实际情况,调整转速环PI,以达更优的控制效果。 算法主体采用matlab function编写,带有注释,可读性强。 二、图片介绍 图一为仿真整体架构; 图二为BP神经网络PI具体模型,主体为matlab function编写而成; 图三为BP神经网络PI部分代码,包含注释; 图四为转速,其中红线为BP神经网络PI控制下的转速,蓝线为普通PI控制下的转速,由图可知前者优于后者; 图五为比例系数kp调整过程; 图六为积分系数ki调整过程; 图七为模型的参考资料。 永磁同步电机(pmsm) BP神经网络 PID
在电机控制领域,永磁同步电机(PMSM)因其高效、节能等优点被广泛应用。而如何更精准地控制PMSM的速度,一直是研究的热点。今天就来聊聊基于BP神经网络PI的永磁同步电机控制方法。
一、算法简介
这个算法核心在于利用BP神经网络对永磁同步电机的速度环PI进行调整,以此增强控制的抗干扰性。BP神经网络大家应该都不陌生,它采用梯度下降法寻优。在这个应用场景里,调整的依据就是转速与给定值之间的误差。简单来说,通过不断计算这个误差,BP神经网络就能根据实际情况,对转速环PI进行调整,最终达到更优的控制效果。
基于BP神经网络PI的永磁同步电机控制【提供参考资料】【有模 型对比】 一、算法简介 利用BP神经网络对永磁同步电机的速度环PI进行调整,增强控制的抗干扰性。 BP神经网络采用梯度下降法寻优,调整依据为转速与给定值的误差,可根据实际情况,调整转速环PI,以达更优的控制效果。 算法主体采用matlab function编写,带有注释,可读性强。 二、图片介绍 图一为仿真整体架构; 图二为BP神经网络PI具体模型,主体为matlab function编写而成; 图三为BP神经网络PI部分代码,包含注释; 图四为转速,其中红线为BP神经网络PI控制下的转速,蓝线为普通PI控制下的转速,由图可知前者优于后者; 图五为比例系数kp调整过程; 图六为积分系数ki调整过程; 图七为模型的参考资料。 永磁同步电机(pmsm) BP神经网络 PID
下面我们来看看部分关键代码(以Matlab为例):
% 假设这里是BP神经网络PI控制的部分核心代码
function [kp, ki] = bpnn_pi_adjust(error, kp, ki, learning_rate)
% error为转速与给定值的误差
% kp当前比例系数
% ki当前积分系数
% learning_rate学习率
% 利用误差反向传播来调整kp和ki
% 这里简单示意,实际可能更复杂
dkp = learning_rate * error;
dki = learning_rate * error;
kp = kp + dkp;
ki = ki + dki;
% 返回调整后的kp和ki
end在这段代码里,bpnnpiadjust函数接收误差error、当前比例系数kp、积分系数ki以及学习率learning_rate作为输入。通过简单的计算(这里只是示意,实际BP神经网络计算更复杂),根据误差来调整kp和ki的值,然后返回调整后的参数,从而实现PI参数的动态调整。
二、图片介绍
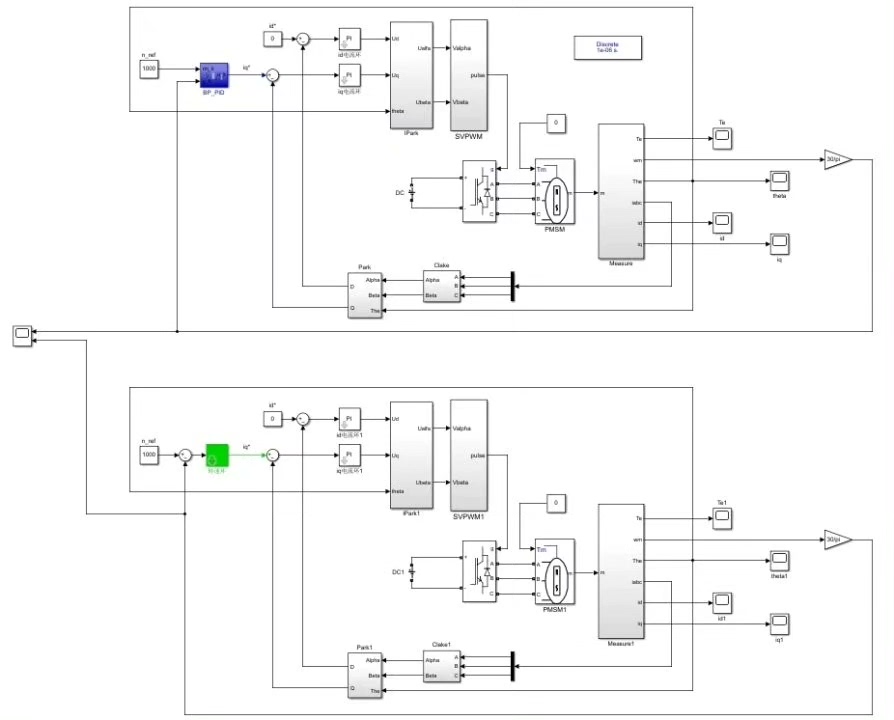
图一:仿真整体架构
这张图展示了整个仿真的框架,从信号输入,到永磁同步电机模型,再到各种反馈环节等等,清晰地呈现了整个控制流程的脉络。它就像是一个导航图,让我们知道各个部分在整个系统中所处的位置和作用。
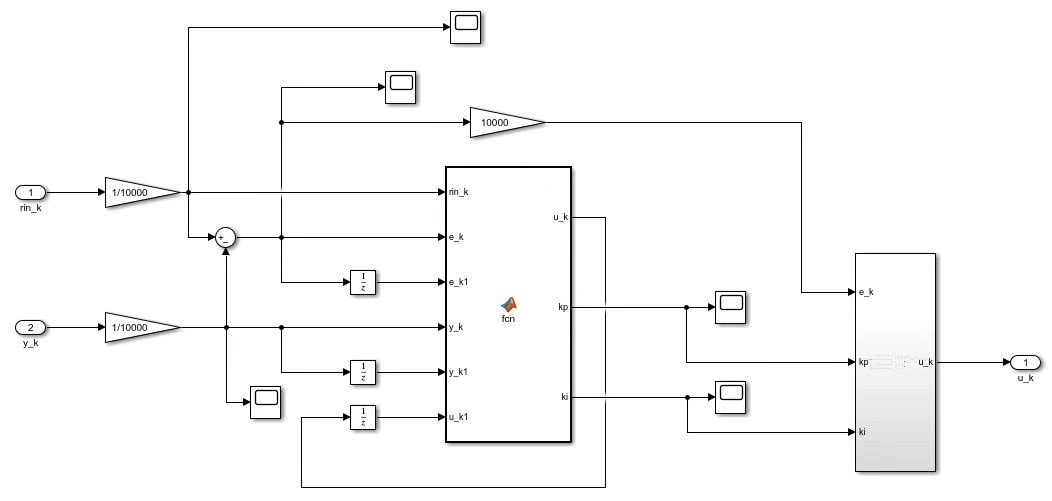
图二:BP神经网络PI具体模型
这个模型主体是用Matlab function编写而成。从模型中我们可以看到BP神经网络如何与PI控制器相互作用,BP神经网络根据输入的误差信号,按照特定的算法对PI的参数进行调整。这里面的每一个节点和连线都代表着数据的流动和计算的过程。
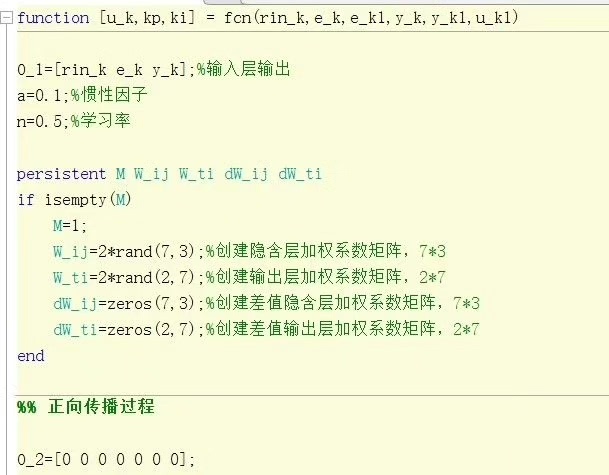
图三:BP神经网络PI部分代码
图中展示的代码包含详细注释,能让我们更好地理解代码逻辑。就像刚才分享的示例代码一样,从变量的定义,到核心计算部分,注释都能帮助我们快速把握代码的功能和实现思路。
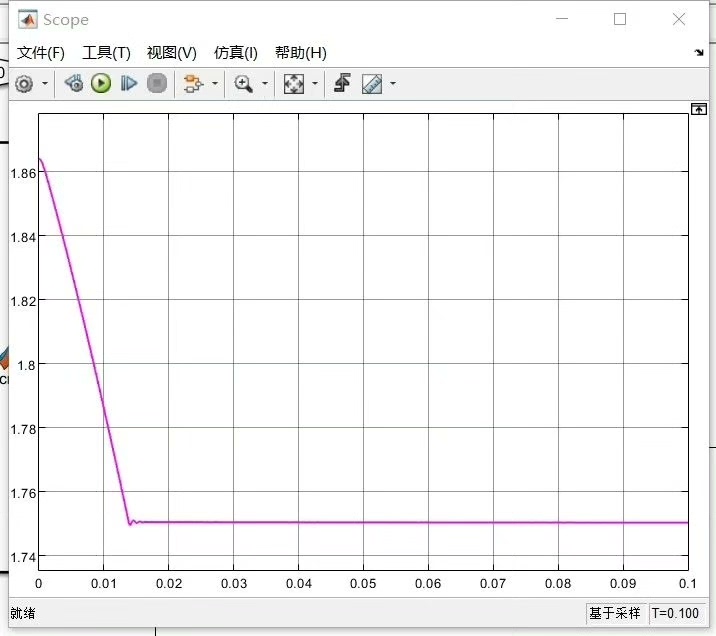
图四:转速对比
红线代表BP神经网络PI控制下的转速,蓝线是普通PI控制下的转速。从图中能明显看出,红线更加平稳,能够更快地达到给定转速并且在受到干扰时恢复能力更强。这直观地体现了基于BP神经网络PI控制的优势,BP神经网络能够根据实时误差动态调整PI参数,使得电机转速控制更加精准。
图五:比例系数kp调整过程
通过观察这个图,我们可以看到在电机运行过程中,kp值是如何随着误差的变化而动态调整的。当电机转速与给定值偏差较大时,kp会相应增大,以加快转速的调整;当转速接近给定值时,kp又会适当减小,防止转速超调。
图六:积分系数ki调整过程
和kp类似,ki的调整过程也反映了BP神经网络对误差的处理策略。ki主要用于消除稳态误差,图中展示了ki如何根据系统运行情况逐渐变化,最终让电机转速稳定在给定值。
图七:模型的参考资料
这张图罗列了整个模型构建过程中参考的各类资料,这些资料是算法研究和模型搭建的基石,涵盖了前人在永磁同步电机控制、BP神经网络应用等方面的优秀成果,为我们的研究提供了坚实的理论依据。
通过对基于BP神经网络PI的永磁同步电机控制算法以及相关图片的介绍,相信大家对这个有趣且实用的控制方法有了更深入的认识。在实际应用中,这种方法有望进一步提升永磁同步电机的控制性能,为工业生产和日常生活带来更多便利。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 7
7 0
0- 0



 已为社区贡献25条内容
已为社区贡献25条内容

所有评论(0)