汽车质心侧偏角估计:状态观测器与卡尔曼滤波的奇妙碰撞
汽车状态估计,汽车质心侧偏角估计,质心侧偏角估计,卡尔曼滤波估计,状态观测器。 Carsim和Simulink联合仿真。 使用了两种方法进行估计,一种是状态观测器法,一种是卡尔曼滤波法进行的。 两种估计方法均为simulink模块搭建,并未使用m语言以及simulink自带模块,是首创方式。 具体模型效果如下: 图一:模型的整体概览图,上为状态观测器法;下为卡尔曼滤波估计法。 图二:状态观测器法内部结构图。 图三:卡尔曼滤波法内部结构图。 图四:Carsim配置截图。 图五:状态观测器法参数配置截图。 图六,图七,图八:30km/h和120km/h下两种估计方法的 质心侧偏角和横摆角速度估计对比图。 图九:文件所有内容。 此外,仿真模型为虚拟资产,一旦不支持退换,该模型配有参考文献以及运行演示视频。

嘿,各位汽车和技术爱好者们!今天来聊聊汽车状态估计中很关键的一块——汽车质心侧偏角估计。这次我们采用了 Carsim 和 Simulink 联合仿真的方式,玩出了点新花样。
两种独特的估计方法
我们用了两种方法进行质心侧偏角估计,分别是状态观测器法和卡尔曼滤波法。而且重点来了,这两种估计方法都是通过 Simulink 模块搭建,没有动用 m 语言,也没用 Simulink 自带模块,绝对首创,够酷吧!
状态观测器法
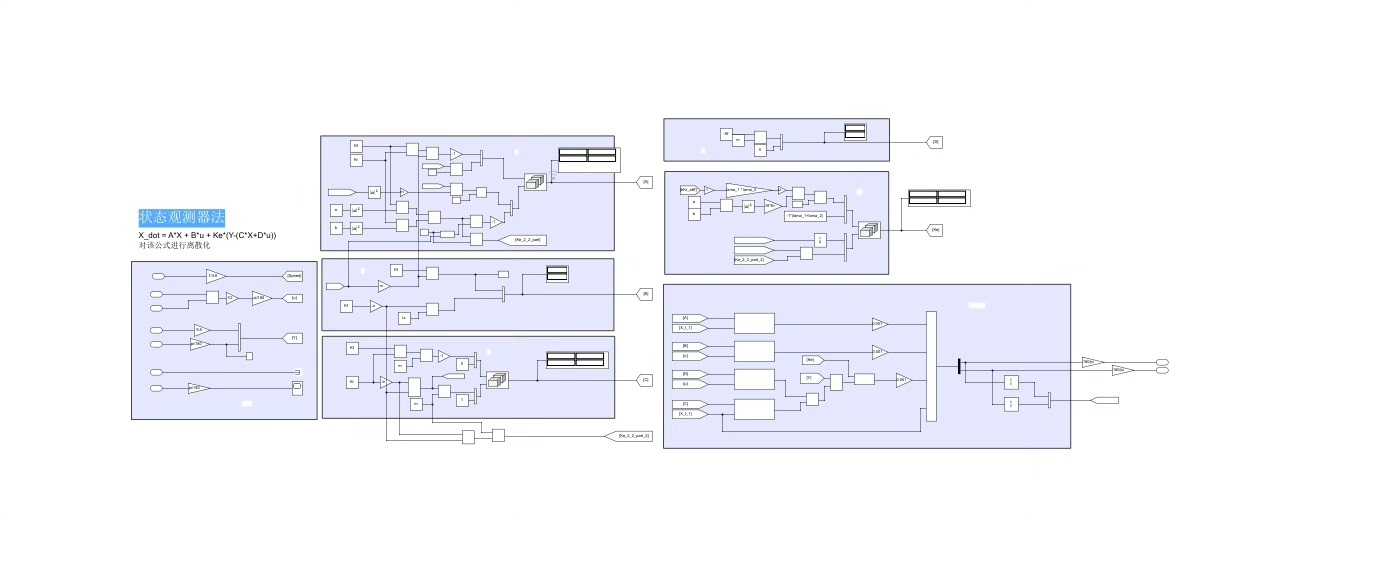
先说说状态观测器法。从图二(状态观测器法内部结构图)能看到它独特的架构。简单来讲,状态观测器的核心就是通过对系统输入输出的观测,来重构系统内部的状态。假设我们有一个汽车动力学系统,状态方程可以写成:
% 假设简单状态方程
% x_dot = Ax + Bu
% y = Cx + Du
A = [0 1; -1 -2]; % 状态转移矩阵示例
B = [0; 1]; % 输入矩阵示例
C = [1 0]; % 输出矩阵示例
D = 0; % 直接传输矩阵示例这里 x 就是我们要估计的状态,包括质心侧偏角等信息。状态观测器就是要根据输入 u 和输出 y 来估计 x。在 Simulink 搭建的模块里,就是按照这样的原理,一步一步实现对质心侧偏角的估计。
卡尔曼滤波法
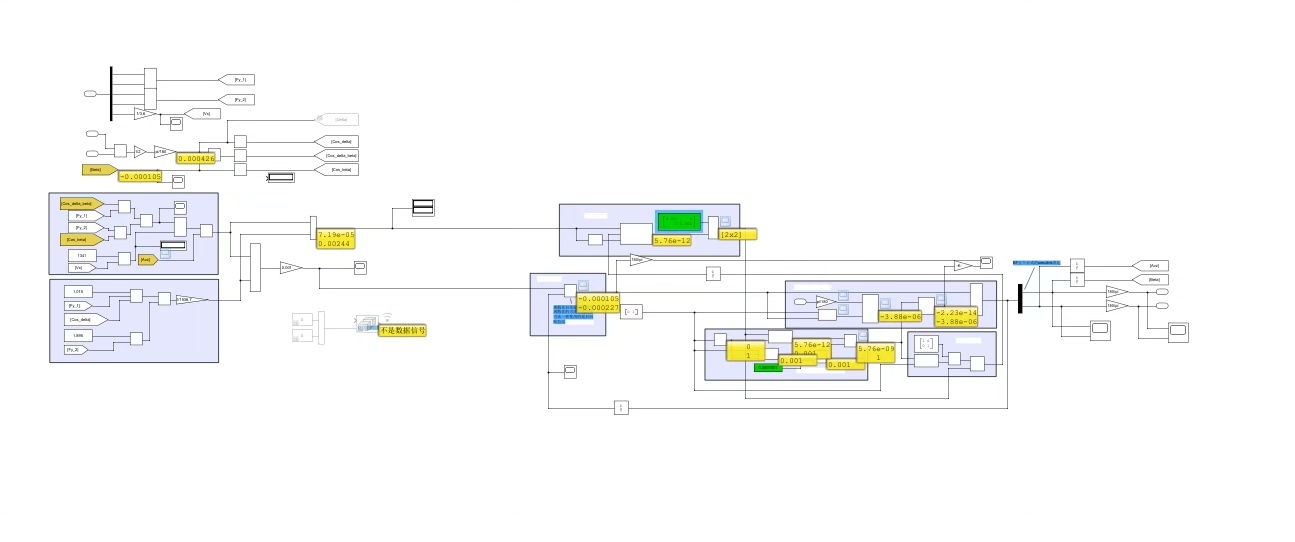
再看看卡尔曼滤波法,从图三(卡尔曼滤波法内部结构图)能感受到它的复杂精巧。卡尔曼滤波是一种最优线性递推滤波算法。它的流程大致是先预测,再更新。预测阶段:
% 预测步骤
x_hat_minus = A * x_hat_plus; % 预测状态
P_minus = A * P_plus * A' + Q; % 预测协方差
% A 是状态转移矩阵,x_hat_plus 是上一时刻估计状态,P_plus 是上一时刻估计协方差,Q 是过程噪声协方差更新阶段:
% 更新步骤
K = P_minus * C' / (C * P_minus * C' + R); % 卡尔曼增益
x_hat_plus = x_hat_minus + K * (y - C * x_hat_minus); % 更新状态估计
P_plus = (eye(size(A)) - K * C) * P_minus; % 更新协方差
% C 是观测矩阵,y 是观测值,R 是观测噪声协方差通过不断重复这两个步骤,卡尔曼滤波就能给出对质心侧偏角的最优估计。
联合仿真与模型效果
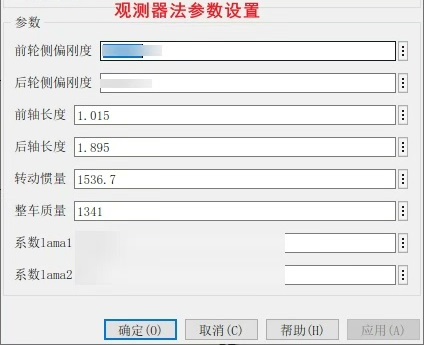
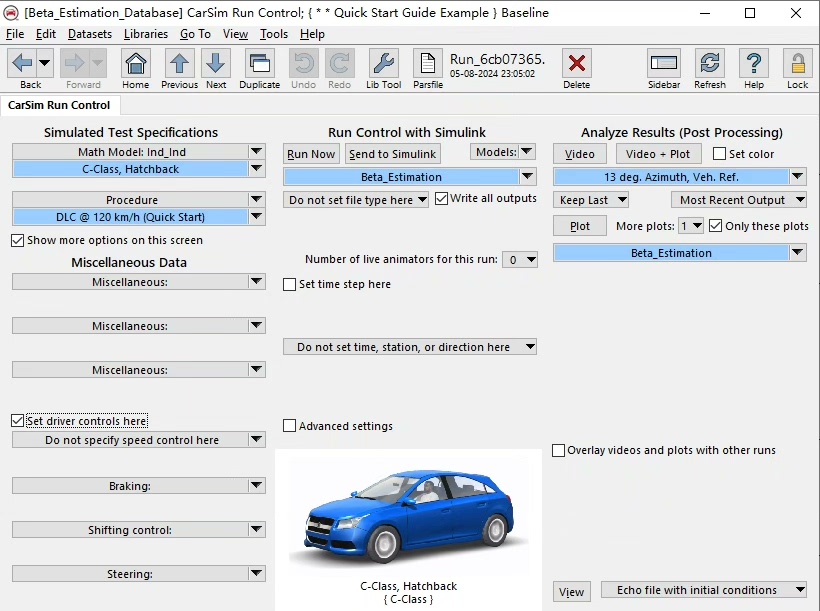
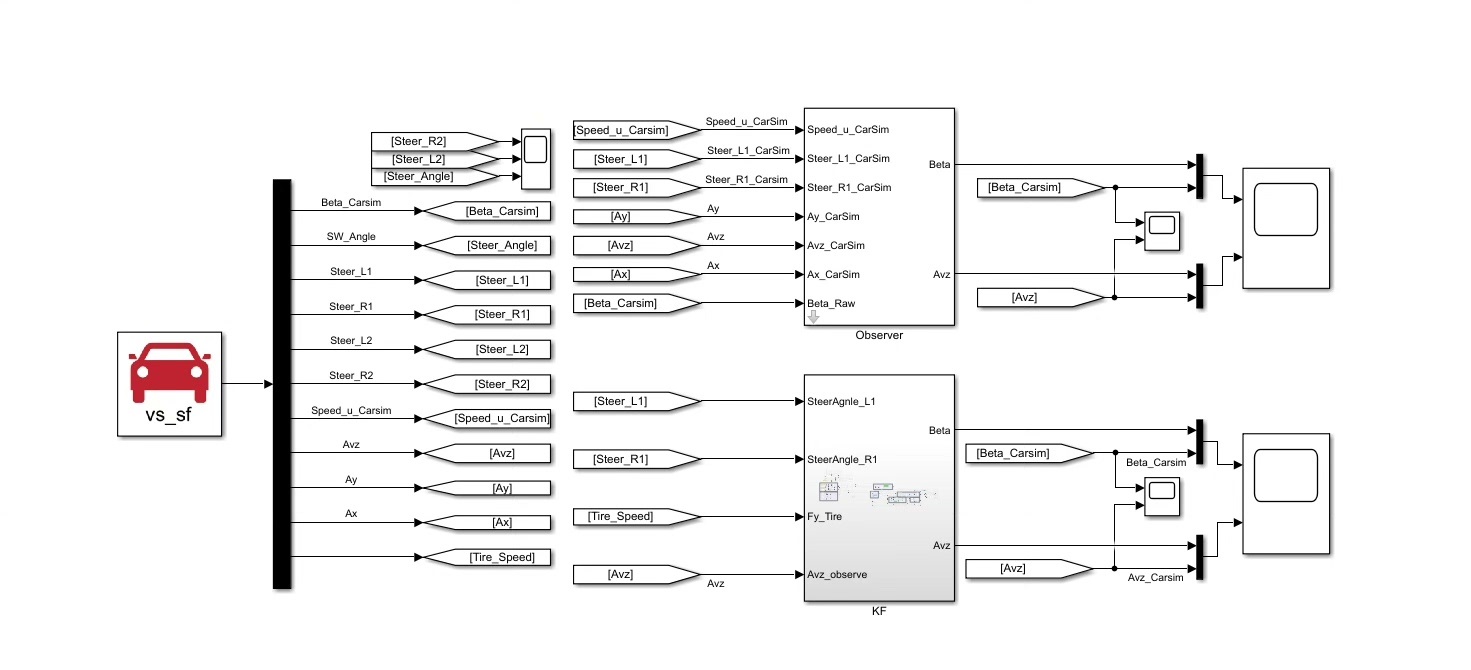
通过 Carsim 和 Simulink 联合仿真,得到了超有趣的结果。从图一(模型的整体概览图)能直观对比状态观测器法和卡尔曼滤波估计法。图四是 Carsim 配置截图,展示了车辆模型等配置细节。图五是状态观测器法参数配置截图,能看到各种参数设定。
汽车状态估计,汽车质心侧偏角估计,质心侧偏角估计,卡尔曼滤波估计,状态观测器。 Carsim和Simulink联合仿真。 使用了两种方法进行估计,一种是状态观测器法,一种是卡尔曼滤波法进行的。 两种估计方法均为simulink模块搭建,并未使用m语言以及simulink自带模块,是首创方式。 具体模型效果如下: 图一:模型的整体概览图,上为状态观测器法;下为卡尔曼滤波估计法。 图二:状态观测器法内部结构图。 图三:卡尔曼滤波法内部结构图。 图四:Carsim配置截图。 图五:状态观测器法参数配置截图。 图六,图七,图八:30km/h和120km/h下两种估计方法的 质心侧偏角和横摆角速度估计对比图。 图九:文件所有内容。 此外,仿真模型为虚拟资产,一旦不支持退换,该模型配有参考文献以及运行演示视频。
最精彩的是图六、图七、图八,它们呈现了 30km/h 和 120km/h 下两种估计方法的质心侧偏角和横摆角速度估计对比图。可以清晰看到两种方法在不同速度下的表现,各有千秋。
模型相关说明
最后得提一下,这个仿真模型可是虚拟资产,一旦售出不支持退换哦。不过别担心,模型配有参考文献,方便大家深入研究背后的理论。还有运行演示视频,能让你更直观感受整个估计过程。从图九(文件所有内容)里,能找到模型的各种细节。
这次的汽车质心侧偏角估计探索,通过两种独特的方法和联合仿真,给汽车状态估计领域带来了新的思路,希望能给大家更多启发!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 9
9 0
0- 0



 已为社区贡献34条内容
已为社区贡献34条内容

所有评论(0)