基于商用车的带有遗忘因子的最小二乘法的坡度估计实践
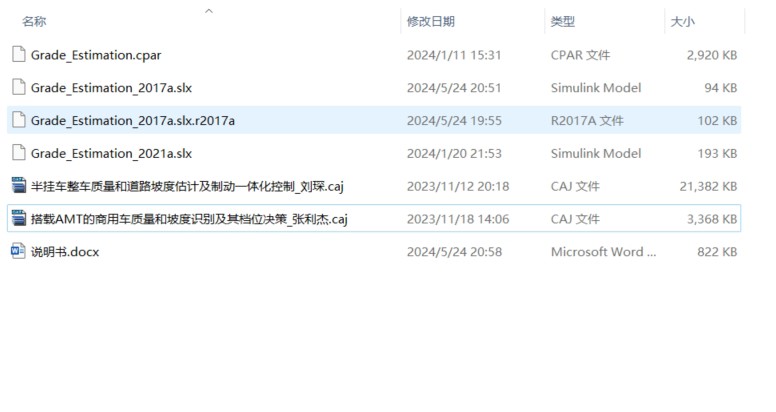
基于商用车的带有遗忘因子的最小二乘法的坡度估计 版本:Trucksim2019 MATLAB2017a 介绍:使用带有遗忘因子的最小二乘法对电动半挂车行驶过程中的坡度进行估计,包括驾驶员模型、电机模型、整车参数、最小二乘法、四挡换挡模型 提供文件: 1、Trucksim文件和simulink文件 2、建模说明文档(包括simulink每部分介绍和原理解释) 3、相关论文
最近在研究基于商用车的坡度估计问题,采用的是带有遗忘因子的最小二乘法,工具则是Trucksim2019和MATLAB2017a 。今天就来和大家分享一下这个有趣的项目。
一、整体思路
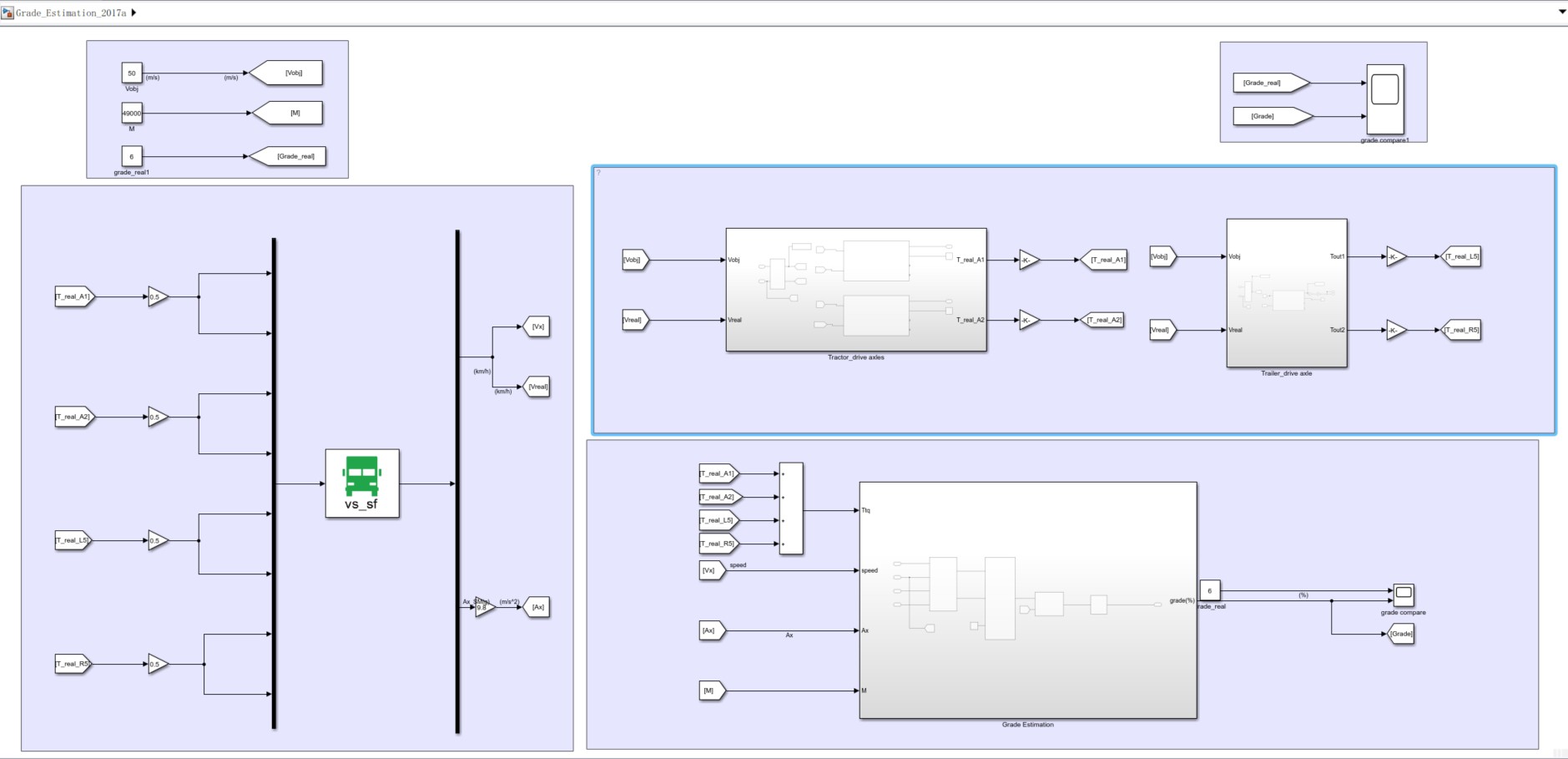
我们的目标是精确估计电动半挂车行驶过程中的坡度。这里面涉及到多个关键模型,像驾驶员模型、电机模型、整车参数、最小二乘法以及四挡换挡模型。
驾驶员模型
驾驶员模型模拟的是真实驾驶员在不同路况下对车辆的操作。比如,驾驶员会根据坡度、车速等因素来控制油门、刹车和换挡。虽然在代码中没有特别复杂的数学公式,但它是整个系统响应现实驾驶情况的重要一环。
电机模型
电机模型则刻画了电机的特性,包括扭矩输出、转速关系等。在MATLAB中,我们可以通过一些传递函数来模拟电机的行为,例如:
% 简单的电机传递函数模型
num = [1];
den = [0.1 1];
sys_motor = tf(num, den);这里创建了一个简单的一阶传递函数来近似电机的动态响应。分子 num 代表传递函数的零点系数,分母 den 代表极点系数。0.1 这个值影响着系统的响应速度,值越小,系统响应越快,但可能会导致不稳定。
整车参数
整车参数涵盖了车辆的质量、轴距、轮胎半径等。这些参数对于准确模拟车辆动力学至关重要。在MATLAB代码中,我们可以这样定义:
% 定义整车参数
mass = 10000; % 车辆质量,单位:kg
wheel_radius = 0.5; % 轮胎半径,单位:m
wheelbase = 5; % 轴距,单位:m这些参数在后续计算车辆受力、运动状态等方面都会用到。
二、最小二乘法与遗忘因子
最小二乘法是我们坡度估计的核心算法。它通过最小化观测数据与模型预测数据之间的误差平方和,来寻找最佳的模型参数。
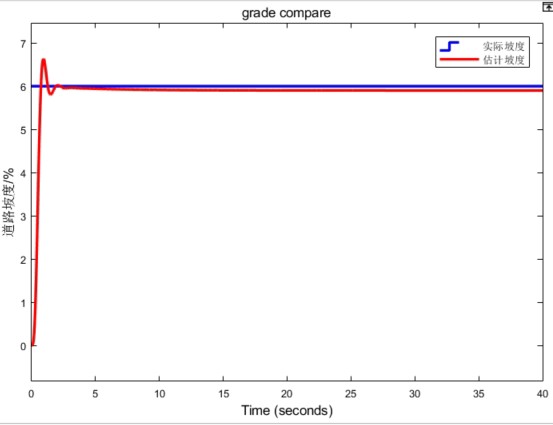
而遗忘因子的引入,则是为了让算法更能适应系统的时变特性。比如,车辆在行驶过程中,轮胎磨损、载重变化等因素会导致车辆动力学特性发生改变。遗忘因子可以让算法对新的数据赋予更高的权重,而逐渐“遗忘”旧的数据。
基于商用车的带有遗忘因子的最小二乘法的坡度估计 版本:Trucksim2019 MATLAB2017a 介绍:使用带有遗忘因子的最小二乘法对电动半挂车行驶过程中的坡度进行估计,包括驾驶员模型、电机模型、整车参数、最小二乘法、四挡换挡模型 提供文件: 1、Trucksim文件和simulink文件 2、建模说明文档(包括simulink每部分介绍和原理解释) 3、相关论文
在MATLAB中实现带有遗忘因子的最小二乘法,代码如下:
lambda = 0.95; % 遗忘因子
P = eye(2); % 初始协方差矩阵
theta = zeros(2, 1); % 初始参数估计值
for k = 1:length(data)
y = data(k, 1); % 观测值
phi = [data(k, 2) 1]; % 回归向量
K = P * phi / (lambda + phi' * P * phi);
theta = theta + K * (y - phi' * theta);
P = (eye(2) - K * phi') * P / lambda;
end在这段代码里,lambda 就是遗忘因子,取值在0到1之间,越接近1,对旧数据的遗忘速度越慢。P 是协方差矩阵,用于更新参数估计的不确定性。theta 是我们要求解的参数,通过不断迭代更新,使其更接近真实值。
三、四挡换挡模型
四挡换挡模型模拟了车辆在不同速度和负载下的换挡逻辑。它决定了车辆在行驶过程中何时从一个挡位切换到另一个挡位,以保证车辆的动力性能和燃油经济性。在实际代码实现中,会涉及到一些条件判断语句,例如:
if speed < 20 && load < 0.5
gear = 1;
elseif speed < 40 && load < 0.7
gear = 2;
elseif speed < 60 && load < 0.9
gear = 3;
else
gear = 4;
end这里简单根据车速 speed 和负载 load 来决定挡位 gear。实际情况可能会更复杂,需要考虑更多因素,比如发动机转速、驾驶员的驾驶习惯等。
四、文件资源
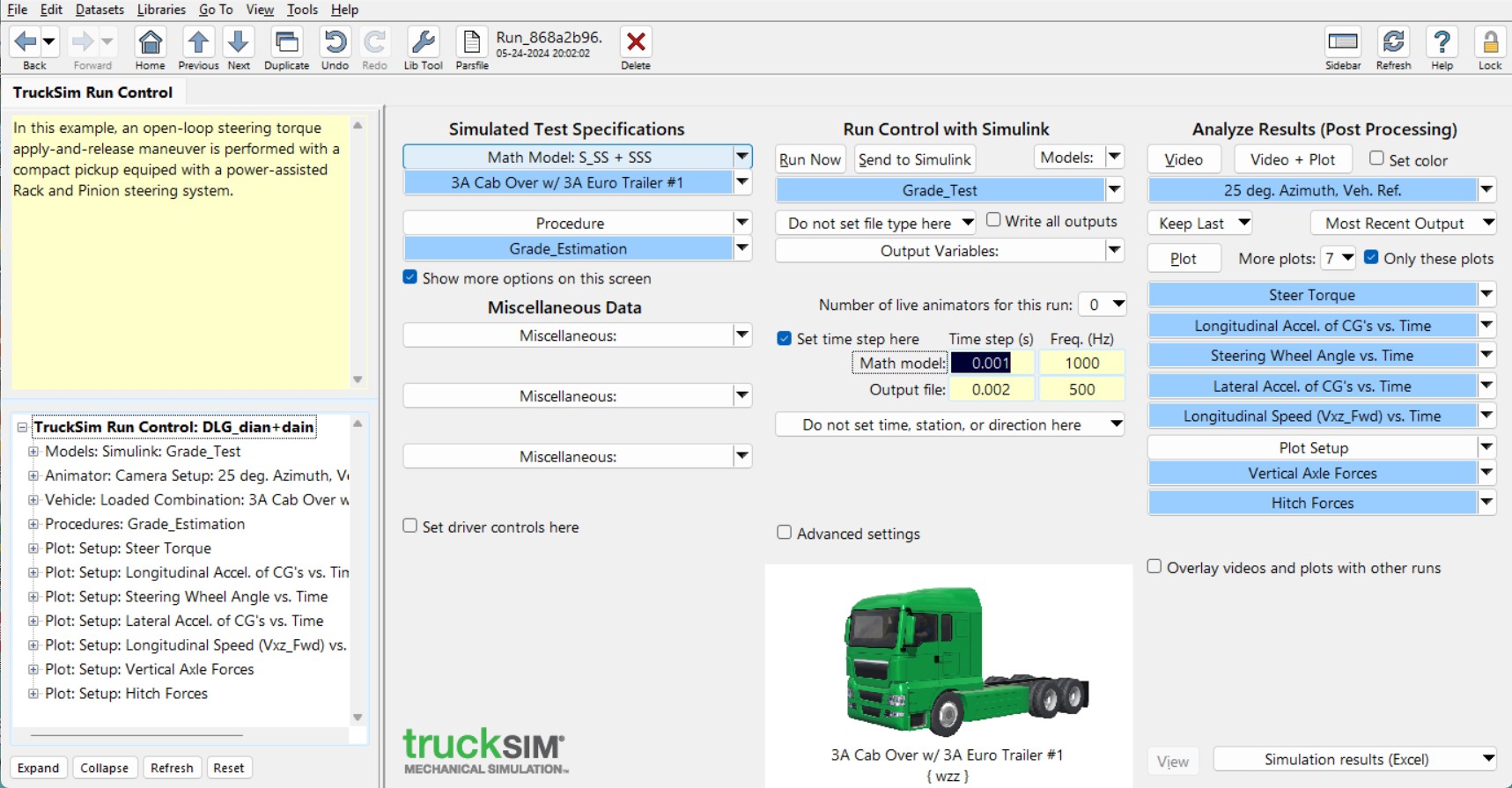
在这个项目中,提供了Trucksim文件和simulink文件,这两个文件是整个项目的重要载体。Trucksim用于模拟真实的车辆行驶环境,而simulink则将各个模型进行整合和可视化。建模说明文档对simulink的每部分进行了详细介绍,同时也阐述了整个项目的原理解释,非常有助于我们理解和改进模型。此外,相关论文也为我们提供了理论支持和前人的研究经验。
总的来说,基于商用车的带有遗忘因子的最小二乘法的坡度估计是一个结合了多学科知识的有趣项目,通过不断优化模型和参数,我们可以更准确地估计车辆行驶过程中的坡度,为车辆的智能化控制提供有力支持。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献51条内容
已为社区贡献51条内容

所有评论(0)