自适应滑模(SMO)在永磁同步电机中的应用:示例C语言定点代码与仿真模型
自适应滑模(SMO)_永磁同步电机_示例C语言定点代码和仿真模型 1. 相比普通的滑模算法,不使用低通滤波器,调参更为简单。 2. 相比普通的滑模算法,估算的角度更加准确,速度更加稳定。 3. 详细原理介绍请参考知乎同名账号技术文章。 C代码特点: 1.定点q15格式代码。 2.代码全结构体封装,注释清楚,结构清晰。 3.通用表贴和内嵌式电机。 代码,普通滑模和自适应滑模性能比较的仿真模型(Matlab 2020b版本)。 文件包括: 1.观测器.C文件.H文件及相关文件,使用举例说明。 2.参考中文和英文文献。 3. 注意代码只有观测器相关部分, 不是整个工程运行文件。
最近在研究永磁同步电机控制算法时,发现了一种超棒的自适应滑模(SMO)方法😎。它和普通的滑模算法相比,有着不少亮眼的优势呢🧐。
自适应滑模算法的优势
首先,它不用低通滤波器,这就使得调参变得简单多啦👏。以往在普通滑模算法里,低通滤波器的参数调整总是让人头疼不已,而自适应滑模算法直接把这个麻烦解决了,简直太贴心👍。
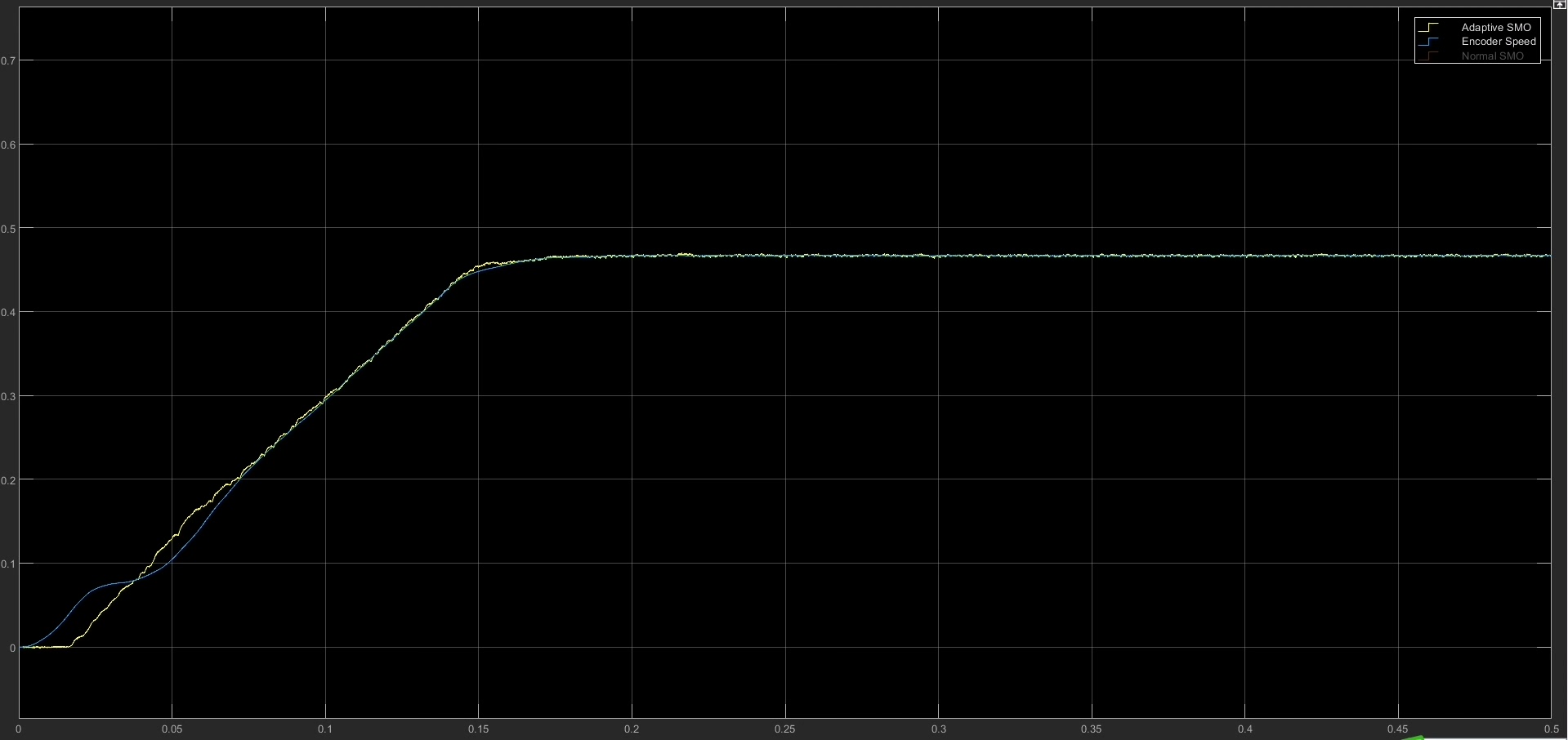
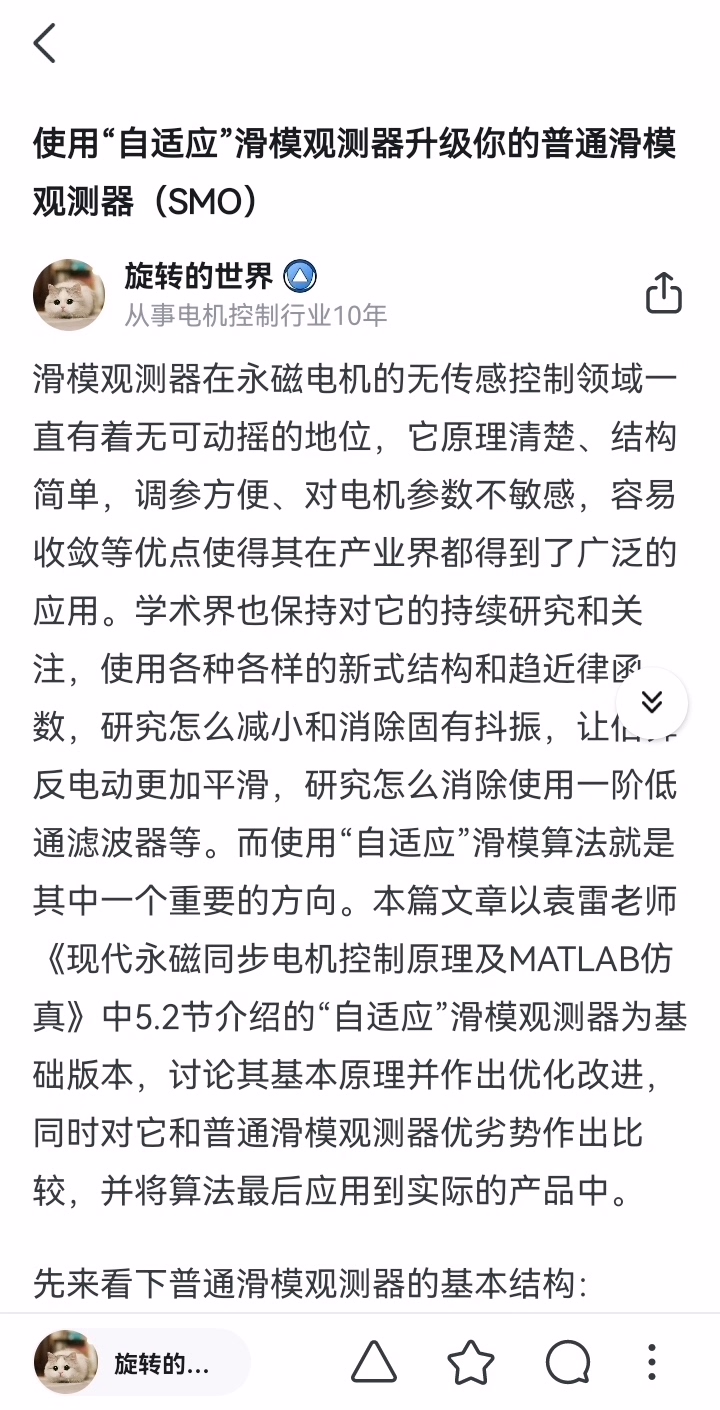
其次,它估算的角度更加准确,速度也更加稳定🤗。这对于永磁同步电机的稳定运行可是至关重要的。想象一下,如果电机的角度估算不准确,速度不稳定,那电机运行起来得多“闹脾气”呀😅。而自适应滑模算法很好地避免了这些问题,让电机能够更平稳、高效地工作。
要是想深入了解它的详细原理,推荐去知乎同名账号看看技术文章📖,里面讲得很详细。
C代码特点
这次还有配套的C代码哦,是定点q15格式代码呢🤓。这种格式在一些对精度和资源要求较高的场合非常实用。
代码全结构体封装,注释清楚,结构清晰👏。这对于我们阅读和理解代码来说,简直是太友好了。看着清晰的代码结构和详细的注释,就像有个贴心的小伙伴在旁边给我们讲解一样,理解起来轻松多啦😁。
自适应滑模(SMO)_永磁同步电机_示例C语言定点代码和仿真模型 1. 相比普通的滑模算法,不使用低通滤波器,调参更为简单。 2. 相比普通的滑模算法,估算的角度更加准确,速度更加稳定。 3. 详细原理介绍请参考知乎同名账号技术文章。 C代码特点: 1.定点q15格式代码。 2.代码全结构体封装,注释清楚,结构清晰。 3.通用表贴和内嵌式电机。 代码,普通滑模和自适应滑模性能比较的仿真模型(Matlab 2020b版本)。 文件包括: 1.观测器.C文件.H文件及相关文件,使用举例说明。 2.参考中文和英文文献。 3. 注意代码只有观测器相关部分, 不是整个工程运行文件。
而且它适用于通用表贴和内嵌式电机,通用性很强👍。不管是哪种类型的永磁同步电机,都能在这个代码的基础上进行适配和优化,真的很厉害👏。
仿真模型
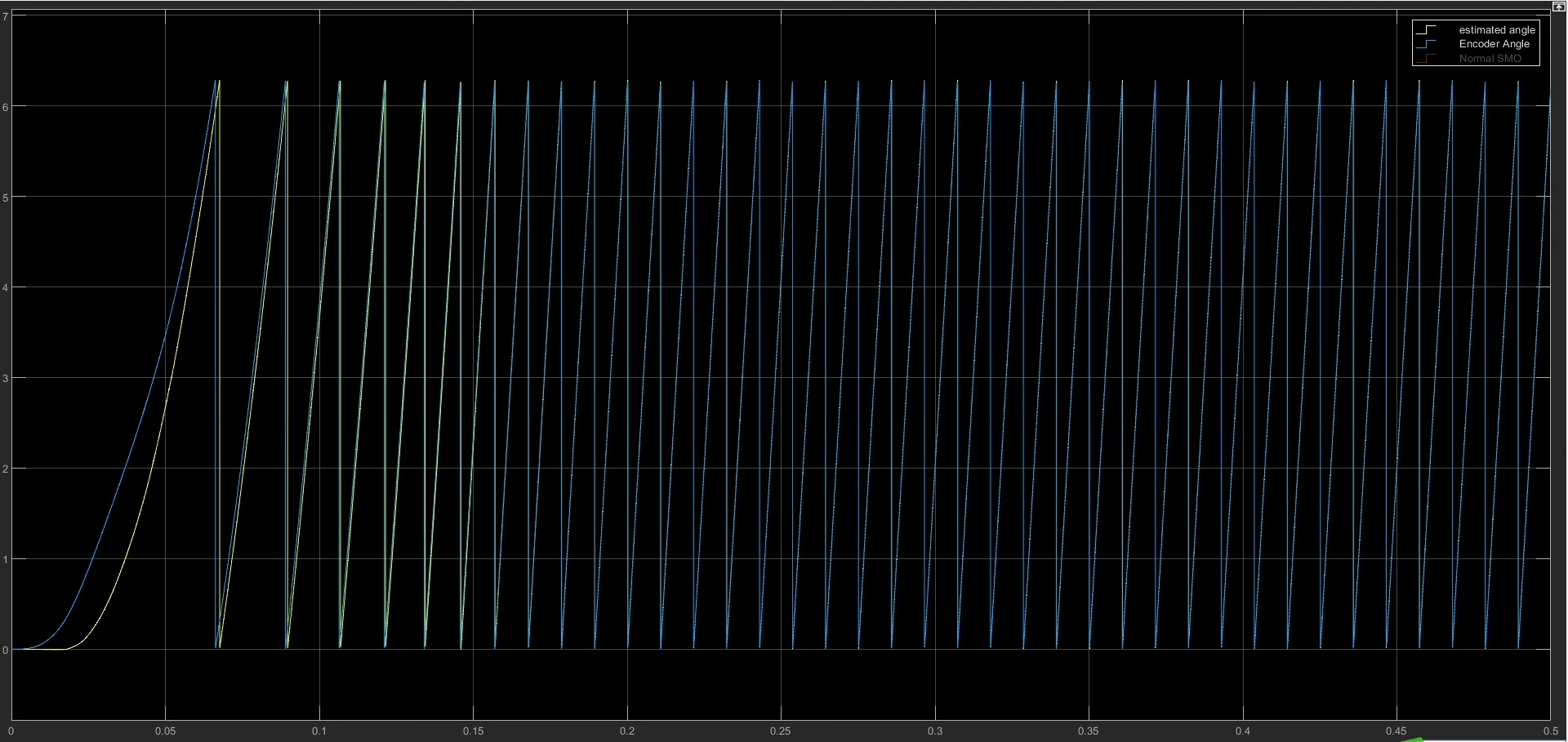
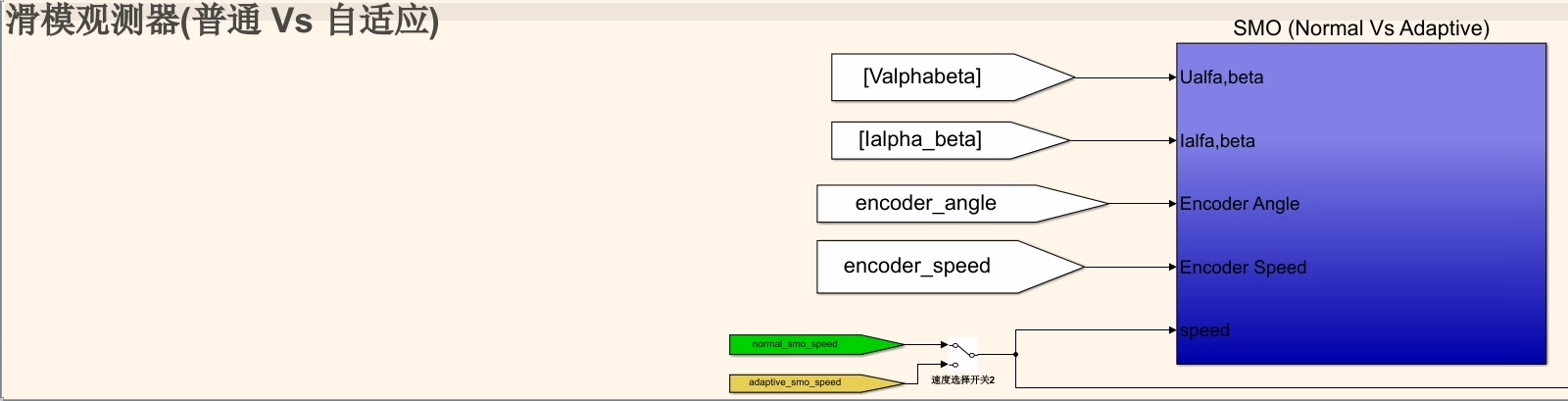
另外还提供了普通滑模和自适应滑模性能比较的仿真模型(Matlab 2020b版本)🎯。通过这个仿真模型,我们可以直观地看到两种算法在实际运行中的表现差异。
给大家分享一下仿真模型里可能会用到的一些关键代码(这里只是简单示意哦😜):
% 定义永磁同步电机参数
poles = 4; % 极对数
R_s = 0.5; % 定子电阻
L_d = 0.01; % d轴电感
L_q = 0.01; % q轴电感
J = 0.001; % 转动惯量
B = 0.001; % 粘性摩擦系数
K_e = 1; % 反电动势系数
K_t = 1; % 转矩系数
% 设定仿真时间和步长
simulation_time = 5; % 仿真时间5秒
step_size = 1e-5; % 步长1e-5秒
% 初始化变量
omega_r = 0; % 转子角速度初始值
theta_r = 0; % 转子角度初始值
i_d = 0; % d轴电流初始值
i_q = 0; % q轴电流初始值
% 主仿真循环
for t = 0:step_size:simulation_time
% 这里可以加入自适应滑模算法和普通滑模算法的具体计算逻辑
% 例如计算电压、电流、转矩等
% 以自适应滑模算法计算转矩为例
tau_sm = adaptive_smo_torque_calculation(i_d, i_q, omega_r, theta_r);
% 普通滑模算法计算转矩
tau_normal_sm = normal_smo_torque_calculation(i_d, i_q, omega_r, theta_r);
% 更新转子角速度和角度
omega_r_dot = (tau_sm - B * omega_r) / J;
omega_r = omega_r + omega_r_dot * step_size;
theta_r = theta_r + omega_r * step_size;
% 更新电流
% 这里省略具体的电流更新计算代码
% 记录数据用于绘图
time_data(t / step_size + 1) = t;
torque_sm_data(t / step_size + 1) = tau_sm;
torque_normal_sm_data(t / step_size + 1) = tau_normal_sm;
end
% 绘图比较两种算法的转矩输出
figure;
plot(time_data, torque_sm_data, 'b', 'DisplayName', 'Adaptive SMO Torque');
hold on;
plot(time_data, torque_normal_sm_data, 'r--', 'DisplayName', 'Normal SMO Torque');
xlabel('Time (s)');
ylabel('Torque (N.m)');
title('Torque Comparison between Adaptive and Normal SMO');
legend;
grid on;在这段代码里,我们先定义了永磁同步电机的各种参数,然后设定了仿真时间和步长。接着初始化了一些变量,进入主仿真循环。在循环里,分别计算了自适应滑模算法和普通滑模算法下的转矩,然后更新了转子的角速度、角度以及电流(这里省略了部分电流更新代码,实际应用中要完整编写)。最后通过绘图展示了两种算法下转矩随时间的变化情况,这样就能很直观地比较它们的性能啦😃。
文件里还包括观测器.C文件、.H文件及相关文件,并且有使用举例说明📄。另外还有参考中文和英文文献,方便我们进一步深入研究。要注意哦,代码只有观测器相关部分,不是整个工程运行文件🧐。
总之,这次分享的自适应滑模(SMO)永磁同步电机的示例C语言定点代码和仿真模型,对于研究和应用永磁同步电机控制算法的小伙伴来说,真的是一份超有价值的资料呀🎉!希望大家都能从中有所收获😁。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 0
0 0
0- 0



 已为社区贡献29条内容
已为社区贡献29条内容

所有评论(0)