ABS汽车防抱死制动系统PID控制模型
基于simulink和carsim联合仿真的ABS汽车防抱死制动系统PID控制模型 控制车轮滑移率在最优值附近,防止车轮发生抱死拖滑,获取较好的制动性能 控制方式为PID控制,输入为实际滑移率与最优滑移率偏差,输出为制动压力调节信号,相较于蓝绿车的逻辑门限值控制,制动效果更好更稳定 附赠ABS控制原理PDF 附赠汽车系统动力学书籍参考资料
各位车迷朋友们,今天要跟大家聊一个非常有意思的话题——汽车防抱死制动系统(ABS)。作为一个汽车爱好者,我一直对这个系统充满好奇。毕竟,ABS可是汽车安全性能中不可或缺的一部分,它能在关键时刻帮助我们避免车轮抱死,从而提升制动效果和安全性。
一、ABS系统到底是个啥?
首先,咱们得搞清楚ABS到底是个啥。ABS的全称是Anti-lock Braking System,中文翻译过来就是防抱死制动系统。它的主要作用就是在刹车时防止车轮抱死,从而保证车辆在紧急制动时仍能保持方向控制,避免发生失控的情况。
那ABS是怎么实现这个功能的呢?简单来说,ABS通过传感器实时监测车轮的转速,当检测到某个车轮即将抱死时,系统会迅速调节该车轮的制动力,使其在抱死边缘来回摆动,从而保持车轮与地面的摩擦力最大化。这个过程听起来像是在“抖刹车”,但实际上,ABS的控制精度非常高,完全不需要驾驶者手动操作。
二、滑移率:ABS的核心控制指标
在ABS系统中,滑移率是一个非常重要的概念。滑移率指的是车轮在制动过程中相对于地面的滑动程度。当车轮完全滚动时,滑移率为0;当车轮完全抱死时,滑移率为100%。研究表明,车轮的滑移率在15%-30%之间时,轮胎与地面的摩擦力达到最大值,这也是ABS系统需要控制的目标区间。
滑移率的计算公式很简单:
滑移率 = (车速 - 轮速) / 车速 × 100%
其中,车速可以通过车辆的整体速度获得,而轮速则由车轮速度传感器测量得到。
三、PID控制:ABS的“大脑”
在ABS系统中,PID控制算法是实现滑移率精准控制的核心技术。PID控制是一种闭环控制算法,通过调节比例(P)、积分(I)和微分(D)三个参数,使系统的输出能够快速、准确地跟踪输入的变化。
基于simulink和carsim联合仿真的ABS汽车防抱死制动系统PID控制模型 控制车轮滑移率在最优值附近,防止车轮发生抱死拖滑,获取较好的制动性能 控制方式为PID控制,输入为实际滑移率与最优滑移率偏差,输出为制动压力调节信号,相较于蓝绿车的逻辑门限值控制,制动效果更好更稳定 附赠ABS控制原理PDF 附赠汽车系统动力学书籍参考资料
对于ABS系统来说,PID控制的输入是实际滑移率与目标滑移率之间的偏差,输出则是对制动力的调节信号。具体来说,当实际滑移率低于目标值时,系统会增加制动力;当实际滑移率高于目标值时,系统会减小制动力。通过不断调整制动力,系统能够将滑移率稳定在目标区间内。
1. PID控制的基本原理
PID控制算法的数学表达式如下:
输出 = Kp × 误差 + Ki × 积分误差 + Kd × 微分误差
其中:
- Kp是比例系数,用于调节系统的响应速度
- Ki是积分系数,用于消除稳态误差
- Kd是微分系数,用于抑制系统的振荡
2. ABS系统中的PID控制实现
在ABS系统中,PID控制算法的实现需要考虑以下几个关键点:
- 传感器信号的获取与处理
- 制动压力的实时调节
- 系统的抗干扰能力
四、Simulink + CarSim:仿真分析的黄金搭档
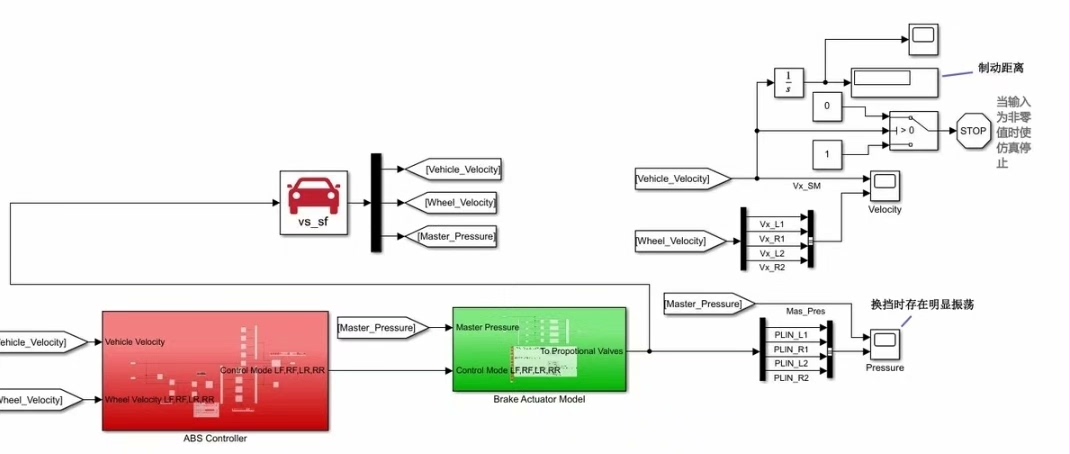
为了验证ABS系统的性能,我们通常会进行仿真分析。Simulink和CarSim的联合仿真环境,为我们提供了一个强大的工具,可以用来验证ABS系统的控制策略和性能。
1. Simulink模型搭建
在Simulink中,我们可以轻松搭建出ABS系统的控制模型。通过Simulink的图形化界面,我们可以直观地看到系统的各个组成部分以及它们之间的相互作用。
% Simulink模型搭建代码示例
model = 'ABS_PID_Control';
open_system(model);2. CarSim接口配置
CarSim是一款专业的汽车动力学仿真软件,它能够提供高精度的车辆动力学模型。通过Simulink与CarSim的接口,我们可以将ABS控制模型与车辆动力学模型结合起来,进行联合仿真。
% CarSim接口配置代码示例
carsim_config = load_system('ABS_PID_Control/CarSim_Interface');3. 联合仿真与结果分析
通过联合仿真,我们可以得到ABS系统在不同工况下的性能表现。例如,我们可以分析系统在紧急制动、湿滑路面等不同情况下的滑移率控制效果。
% 联合仿真代码示例
sim('ABS_PID_Control');五、仿真结果与性能分析
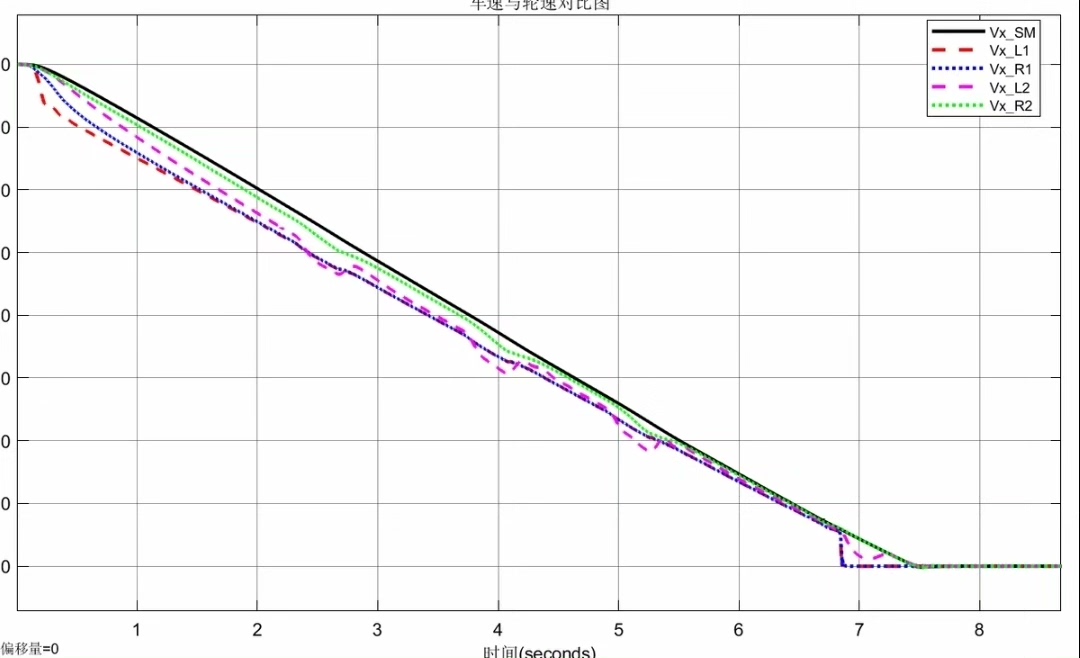
通过仿真分析,我们发现采用PID控制的ABS系统在控制车轮滑移率方面表现出色。与传统的逻辑门限值控制相比,PID控制能够更快速、更精确地调节制动力,从而提高制动性能和稳定性。
具体来说,PID控制在以下几个方面表现尤为突出:
- 响应速度:PID控制能够快速响应滑移率的变化,确保系统在最短时间内做出调整。
- 控制精度:PID控制能够将滑移率稳定在目标区间内,从而保证最佳的摩擦力。
- 稳定性:PID控制具有良好的抗干扰能力,能够在不同工况下保持系统的稳定性。
六、总结与展望
通过本次研究,我们深入探讨了ABS系统的控制原理,并通过Simulink和CarSim的联合仿真,验证了PID控制在ABS系统中的优越性。仿真结果表明,PID控制能够显著提高ABS系统的性能,为车辆的安全制动提供了有力保障。
对于未来的研究,我们可以考虑以下几个方向:
- 自适应控制:根据车辆状态和路面条件,动态调整PID参数,进一步优化控制效果。
- 多目标优化:在保证滑移率控制的同时,考虑其他性能指标,如制动距离和舒适性。
- 硬件在环仿真:结合硬件在环仿真技术,进一步提升控制策略的验证水平。
总之,ABS系统的研究和开发是一项复杂而有趣的工作。通过不断的技术创新和优化,我们可以为驾驶者提供更安全、更可靠的制动体验。
附赠资料:
- ABS控制原理PDF
- 汽车系统动力学书籍参考资料
感兴趣的朋友可以自行下载学习,一起探讨更多有趣的汽车技术话题!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 0
0 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)