基于滑膜控制扰动观测器的永磁同步电机PMSM模型控制对比探究
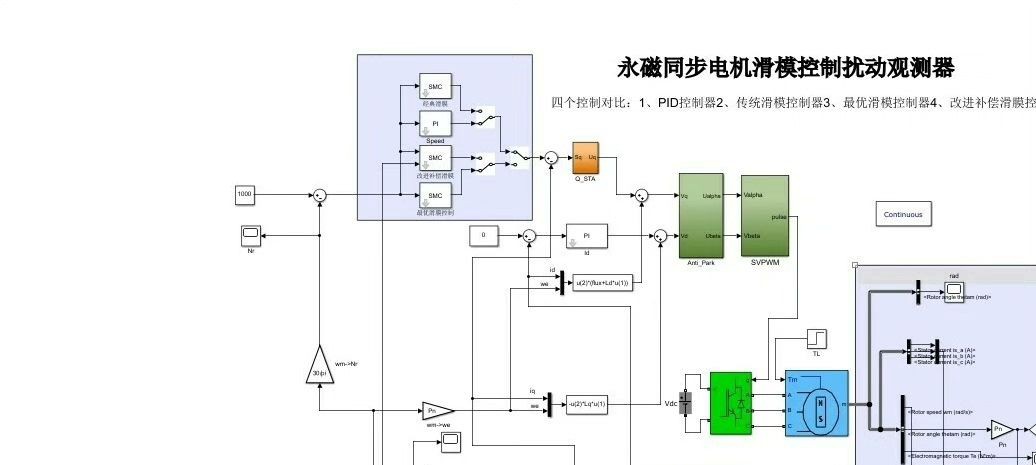
基于滑膜控制扰动观测器的永磁同步电机PMSM模型 四个控制对比: 1、PID控制器 2、传统滑模控制器 3、最优滑模控制器 4、改进补偿滑膜控制器 附带出图四个控制对比的说明文档及参考文献
在永磁同步电机(PMSM)的控制领域,不同控制策略各有千秋。今天咱们就来唠唠基于滑膜控制扰动观测器的PMSM模型下,四种常见控制策略的对比。
一、PID控制器
PID控制器算是控制领域的“老大哥”了,简单却有效。它通过比例(P)、积分(I)、微分(D)三个环节对误差进行处理,进而调整控制量。
import numpy as np
class PIDController:
def __init__(self, kp, ki, kd):
self.kp = kp
self.ki = ki
self.kd = kd
self.prev_error = 0
self.integral = 0
def update(self, setpoint, process_variable):
error = setpoint - process_variable
p_term = self.kp * error
self.integral += error
i_term = self.ki * error
derivative = error - self.prev_error
d_term = self.kd * derivative
output = p_term + i_term + d_term
self.prev_error = error
return output上述代码简单实现了一个PID控制器类。init方法初始化了比例、积分、微分系数,以及上一次的误差和积分项。update方法根据设定值和当前实际值计算误差,进而算出P、I、D三项的值,最后得出控制输出。
在PMSM控制中,PID控制器能快速响应,一定程度上消除稳态误差。但面对复杂工况变化时,它的适应性就显得有些不足。
二、传统滑模控制器
传统滑模控制器基于滑动模态的概念,系统状态能在特定切换面上滑动并渐进稳定。它对系统参数变化和外部干扰有较强鲁棒性。
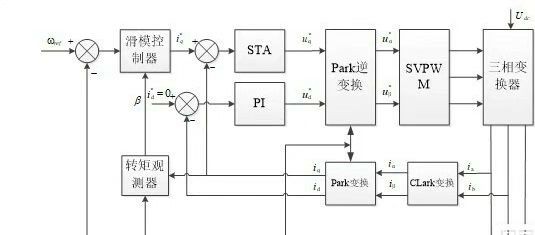
假设PMSM的状态方程为:
\(\dot{x} = Ax + Bu + Dd\)
其中 \(x\) 是状态变量,\(A\) 是系统矩阵,\(B\) 是输入矩阵,\(u\) 是控制输入,\(D\) 是干扰矩阵,\(d\) 是干扰。
滑模面通常定义为 \(s = Cx\) ,其中 \(C\) 是滑模面系数矩阵。控制律设计为:
\(u = -K\mathrm{sgn}(s)\)
import numpy as np
def traditional_smc(x, A, B, C, K):
s = np.dot(C, x)
u = -K * np.sign(s)
return u这段代码简单实现了传统滑模控制律的计算。先根据当前状态 \(x\) 计算滑模面的值 \(s\) ,然后根据控制增益 \(K\) 和滑模面值的符号得出控制输入 \(u\) 。然而,传统滑模控制器存在抖振问题,这会影响系统性能和寿命。
三、最优滑模控制器
为了克服传统滑模控制器的抖振问题,最优滑模控制器应运而生。它通过优化滑模面和控制律,在保证鲁棒性的同时减小抖振。
基于滑膜控制扰动观测器的永磁同步电机PMSM模型 四个控制对比: 1、PID控制器 2、传统滑模控制器 3、最优滑模控制器 4、改进补偿滑膜控制器 附带出图四个控制对比的说明文档及参考文献
一般采用二次型性能指标来设计最优滑模控制器:
\(J=\int_{0}^{\infty}(x^TQx + u^TRu)dt\)
其中 \(Q\) 和 \(R\) 是加权矩阵,通过求解Riccati方程找到最优控制增益。
import numpy as np
from scipy.linalg import solve_continuous_are
def optimal_smc(x, A, B, Q, R, C):
P = solve_continuous_are(A, B, Q, R)
K = np.dot(np.linalg.inv(R), np.dot(B.T, P))
s = np.dot(C, x)
u = -np.dot(K, x) - np.sign(s)
return u上述代码中,先通过 solvecontinuousare 函数求解Riccati方程得到矩阵 \(P\) ,进而算出最优控制增益 \(K\) 。再结合滑模面计算控制输入 \(u\) 。相比传统滑模,它在抑制抖振上有更好表现。
四、改进补偿滑膜控制器
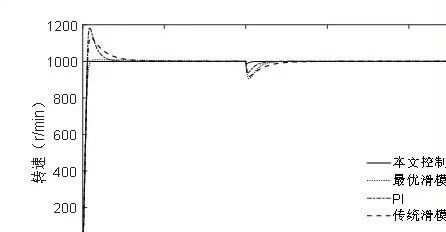
改进补偿滑膜控制器则是在前面的基础上,进一步对扰动进行补偿。它利用滑膜控制扰动观测器实时估计干扰,并将补偿量加入控制律。
假设扰动观测器的估计值为 \(\hat{d}\) ,那么改进后的控制律为:
\(u = -K\mathrm{sgn}(s) - \hat{d}\)
import numpy as np
def improved_smc(x, A, B, C, K, disturbance_estimator):
s = np.dot(C, x)
u = -K * np.sign(s) - disturbance_estimator(x)
return u在这个代码实现里,控制律计算时减去了扰动观测器对当前状态 \(x\) 估计出的干扰值。这种方式能更好地应对外部干扰,提升系统的控制精度。
四个控制对比的说明文档及参考文献
说明文档
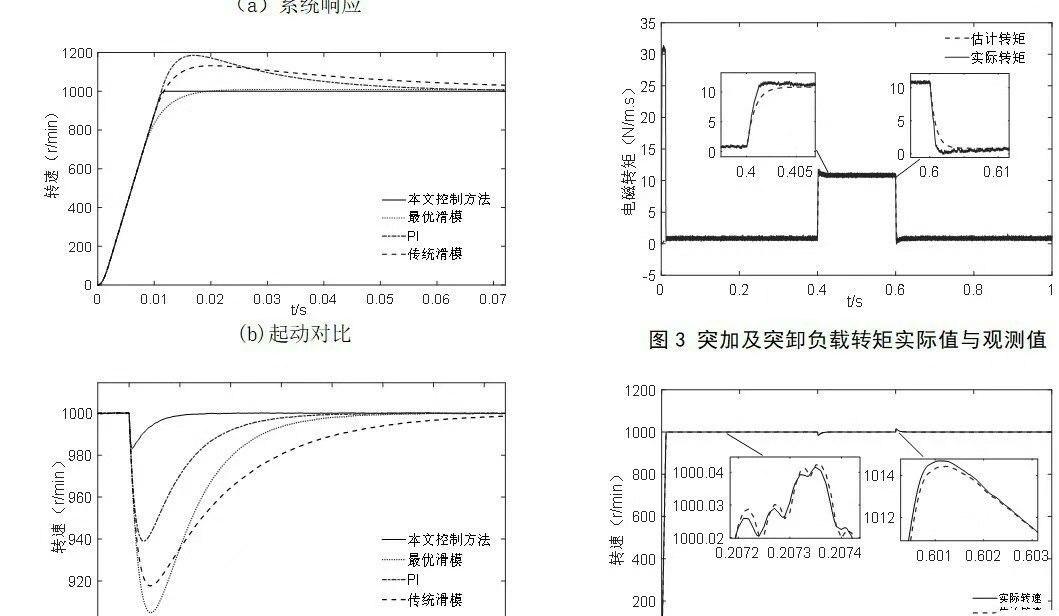
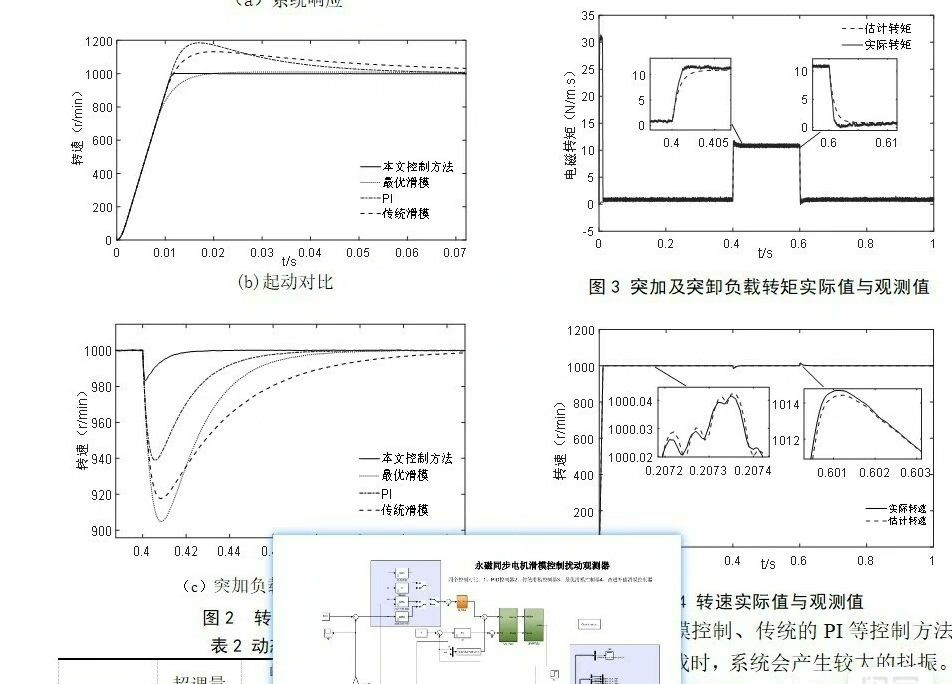
通过对上述四种控制器在PMSM模型上的应用对比,可以发现:
- PID控制器简单易用,但鲁棒性较差,在工况变化大时难以维持良好控制性能。
- 传统滑模控制器鲁棒性强,但抖振问题明显。
- 最优滑模控制器有效抑制抖振,兼顾鲁棒性和性能。
- 改进补偿滑膜控制器在应对干扰方面表现出色,能进一步提升控制精度。
在实际应用中,需根据具体需求和场景选择合适的控制策略。
参考文献
[1] 《永磁同步电机控制技术》 - 详细介绍了PMSM的基础理论和多种控制方法。
[2] “Sliding Mode Control for Permanent Magnet Synchronous Motors: A Review” - 深入探讨了滑模控制在PMSM中的应用及发展。
希望通过这篇博文,能让大家对基于滑膜控制扰动观测器的PMSM模型下的不同控制策略有更清晰的认识。欢迎一起讨论交流。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献20条内容
已为社区贡献20条内容

所有评论(0)