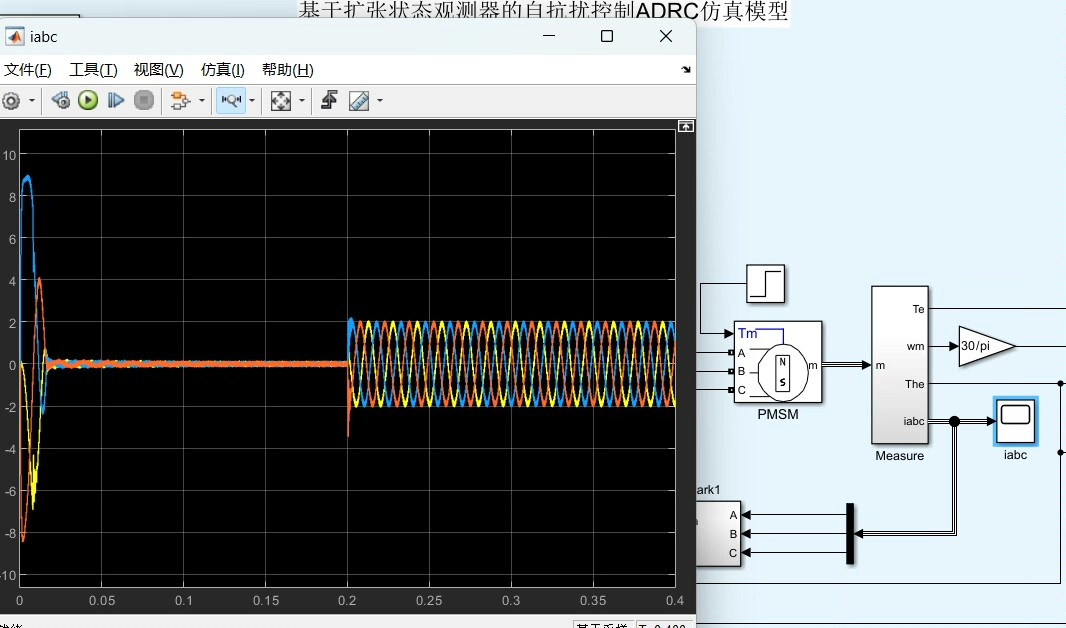
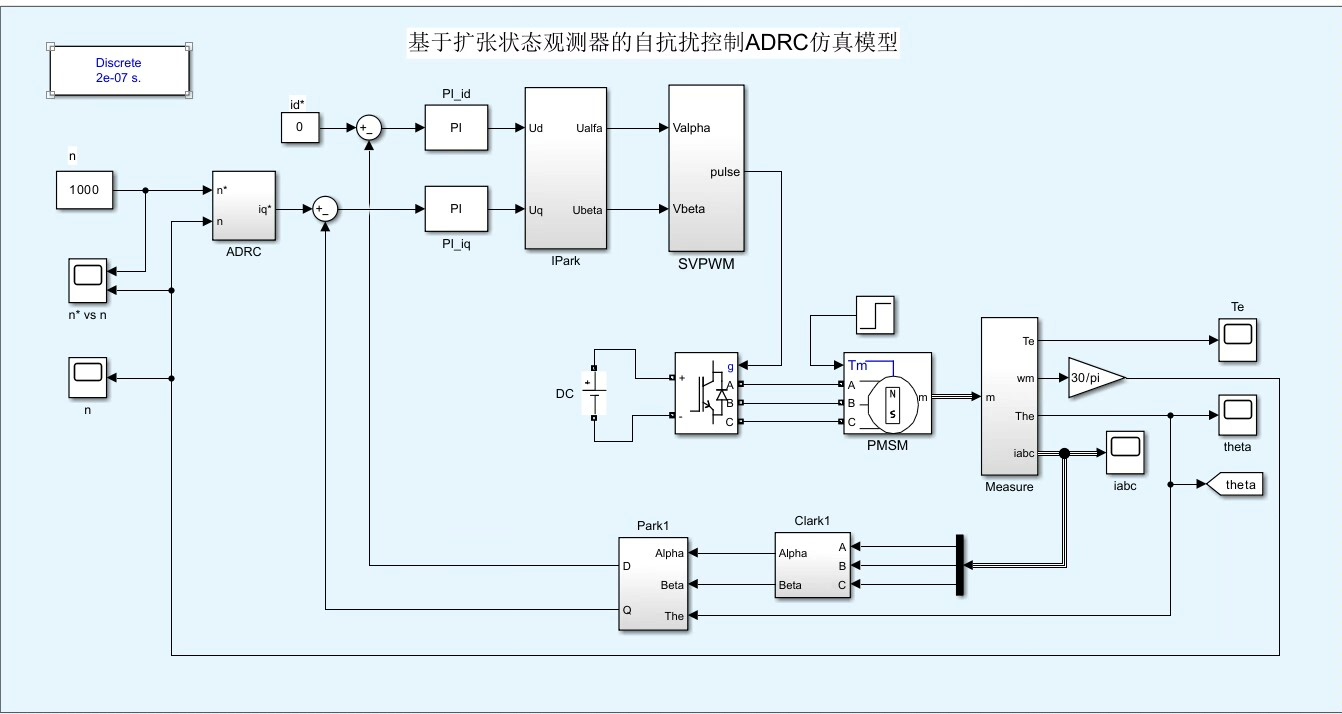
基于扩张状态观测器的PMSM自抗扰控制ADRC仿真模型研究:探索TD、NLSEF与ESO的协同...
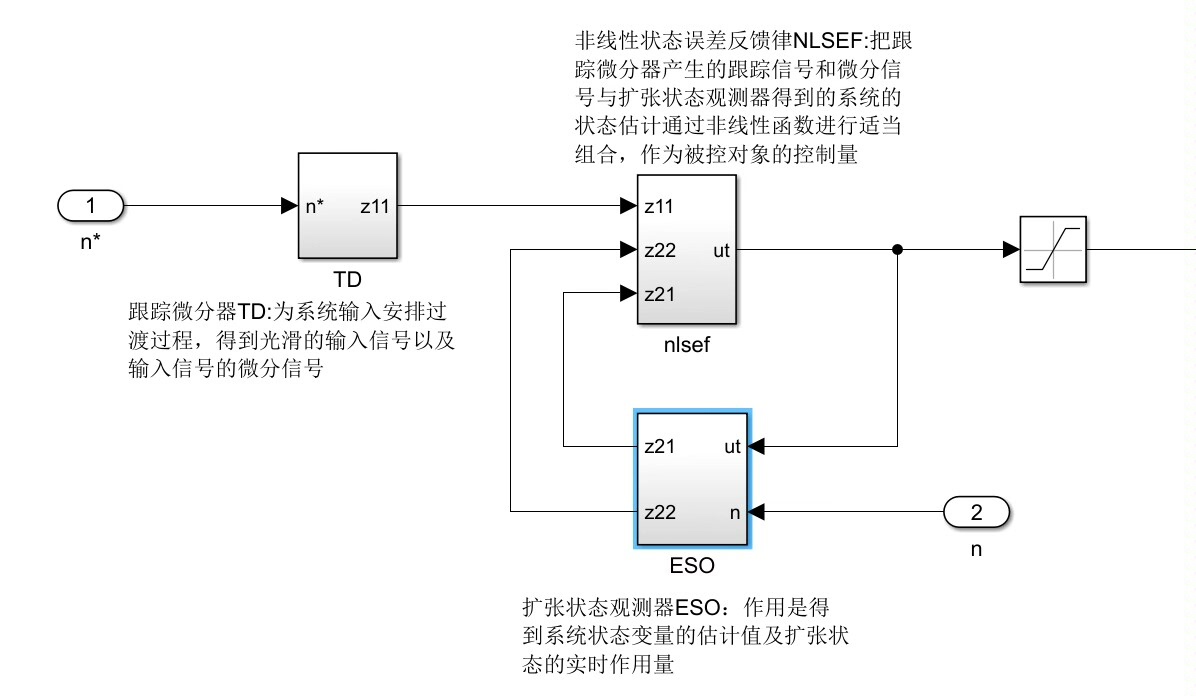
MATLAB/Simulink基于扩张状态观测器的永磁同步电机(PMSM)自抗扰控制ADRC仿真模型 ①跟踪微分器TD:为系统输入安排过渡过程,得到光滑的输入信号以及输入信号的微分信号。 ②非线性状态误差反馈律NLSEF:把跟踪微分器产生的跟踪信号和微分信号与扩张状态观测器得到的系统的状态估计通过非线性函数进行适当组合,作为被控对象的控制量 ③扩张状态观测器ESO:作用是得到系统状态变量的估计值及扩张状态的实时作用量。
在永磁同步电机(PMSM)控制领域,工程师们最头疼的往往不是理想工况下的控制效果,而是系统参数变化、负载扰动这些"不速之客"。传统PID控制就像拿着固定地图找路,遇到突发路况容易翻车。这时候自抗扰控制(ADRC)带着它的三大法宝闪亮登场——今天咱们就拆开这个黑盒子,看看它到底怎么让电机控制变得"抗揍又灵活"。
先给系统装个行车记录仪
跟踪微分器TD就像是控制系统的预判大师。试想电机转速指令突然从0飙升到3000rpm,直接怼给电机容易引起震荡。TD的解决思路很聪明:"急什么,咱们先规划个安全路径"。通过安排过渡过程,把阶跃信号变成平滑的S曲线。MATLAB里实现这个功能只需要几行代码:
function [v1, v2] = TD(v, h, T)
persistent x1 x2
if isempty(x1)
x1 = 0; x2 = 0;
end
d = h*h;
a = x2 + h*(x1 - v)/d;
x1 = x1 + h*x2;
x2 = x2 + h*fhan(x1 - v, x2, 0.5, h);
v1 = x1;
v2 = x2;
end这个非线性跟踪算法里藏着个小秘密:参数h控制着过渡快慢。就像开车时踩油门的力度,h太大会超调,太小又反应迟钝。实际调参时建议从0.01开始逐步试错,观察过渡曲线的平滑度。
状态观测器的读心术
扩张状态观测器ESO是真正的幕后英雄。它不仅盯着电机转速、电流这些明面上的状态,还专门开了个"上帝视角"来观测总扰动。这就好比给电机装了个CT机,把参数漂移、负载变化这些藏在暗处的干扰都揪出来。Simulink模型里通常用这个状态方程实现:
function dx = ESO(y, u)
global beta1 beta2 beta3
e = z1 - y;
dz1 = z2 - beta1*e;
dz2 = z3 - beta2*fal(e,0.5,0.1) + 1500*u;
dz3 = -beta3*fal(e,0.25,0.1);
dx = [dz1; dz2; dz3];
end重点在最后那个扩张状态z3——它就像个海绵,专门吸收系统内外所有扰动。beta系数的选取有讲究,建议按带宽法设置:beta1=3w, beta2=3w², beta3=w³,w取系统带宽的3-5倍。
MATLAB/Simulink基于扩张状态观测器的永磁同步电机(PMSM)自抗扰控制ADRC仿真模型 ①跟踪微分器TD:为系统输入安排过渡过程,得到光滑的输入信号以及输入信号的微分信号。 ②非线性状态误差反馈律NLSEF:把跟踪微分器产生的跟踪信号和微分信号与扩张状态观测器得到的系统的状态估计通过非线性函数进行适当组合,作为被控对象的控制量 ③扩张状态观测器ESO:作用是得到系统状态变量的估计值及扩张状态的实时作用量。
非线性组合的暴力美学
当TD和ESO把准备好的材料送到NLSEF面前,这个非线性大厨开始展现真正的技术。不同于PID的线性加权,它用fal函数进行混搭:
function f = fal(e, alpha, delta)
if abs(e) > delta
f = abs(e)^alpha * sign(e);
else
f = e / (delta^(1-alpha));
end
end这个看似简单的函数藏着两个彩蛋:当误差大时表现激进(类似PD控制),误差小时自动切换为温和模式。alpha参数控制着非线性程度,0.75是个不错的起调点。实际调试时会发现,这比传统PID多了一个调节维度,对付负载突变时效果拔群。
仿真调参实战经验
在Simulink里搭完模型后,先别急着点运行。几个避坑指南:
- ESO的初始状态尽量接近真实值,否则观测器会"懵圈"
- 先调TD的过渡时间,再调ESO带宽,最后打磨NLSEF的非线性参数
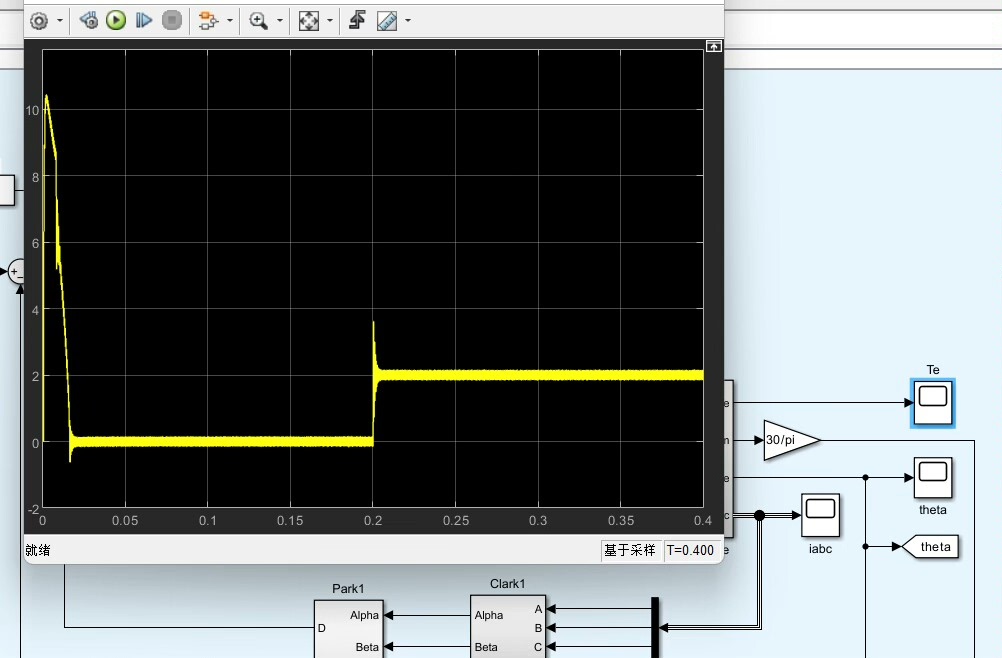
- 突加负载测试时,观察z3的波动幅度——它直接反映了系统抗扰能力
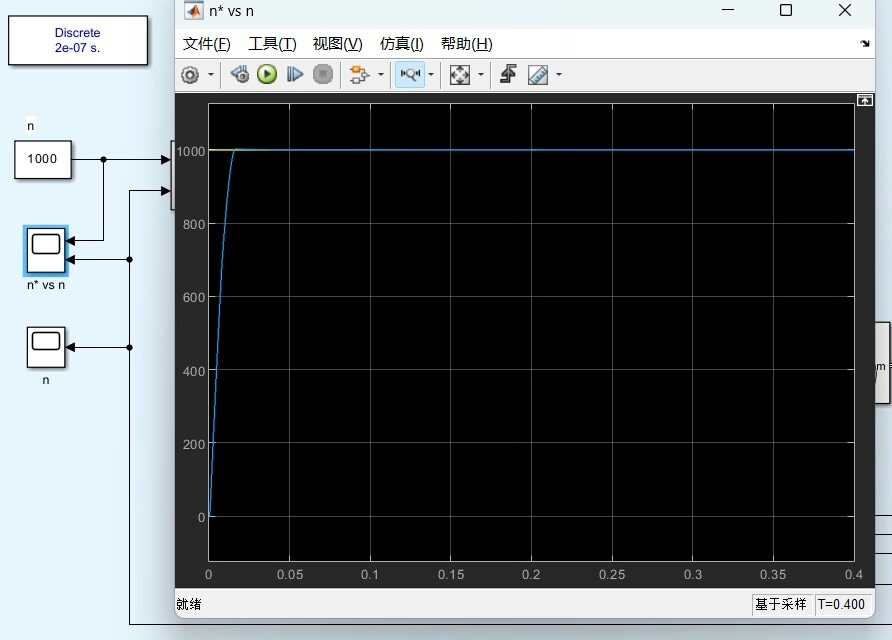
跑起来的波形会说话:传统PID在0.2秒突加负载时转速跌了200rpm,而ADRC这边只掉了不到50rpm。更妙的是,ESO输出的扰动估计曲线几乎和真实扰动重合,这验证了扩张状态观测的威力。
说到底,ADRC不是在和扰动硬碰硬,而是用TD规划路径、ESO预判风险、NLSEF灵活应对。这种"你扰动任你扰动,我自岿然不动"的哲学,或许正是复杂工况下电机控制的终极答案。下次遇到难缠的控制对象时,不妨试试这个自带抗扰Buff的方案——当然,准备好咖啡,调参夜战是免不了的。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献19条内容
已为社区贡献19条内容

所有评论(0)