探索ADRC自抗干扰控制:扩张状态观测器仿真之旅
扩张状态观测器仿真——观察ADRC自抗干扰控制 搭建了ADRC自抗干扰控制的仿真模型,通过扩张状态的观测器进行观察估测: 跟踪微分器TD:为系统输入安排过渡过程,得到光滑的输入信号以及输入信号的微分信号。 非线性状态误差反馈律NLSEF:把跟踪微分器产生的跟踪信号和微分信号与扩张状态观测器得到的系统的状态估计通过非线性函数进行适当组合,作为被控对象的控制量。 扩张状态观测器ESO:作用是得到系统状态变量的估计值及扩张状态的实时作用量。 结果表明观测值与实际输出值相近,仿真能完美实现功能。 文件包括: [1]仿真模型 [2]扩张状态观测器介绍PPT [3]相关参考文献和书籍
在控制领域,自抗干扰控制(ADRC)一直是个备受瞩目的存在,今天咱们就来深入探讨下基于扩张状态观测器的ADRC仿真。
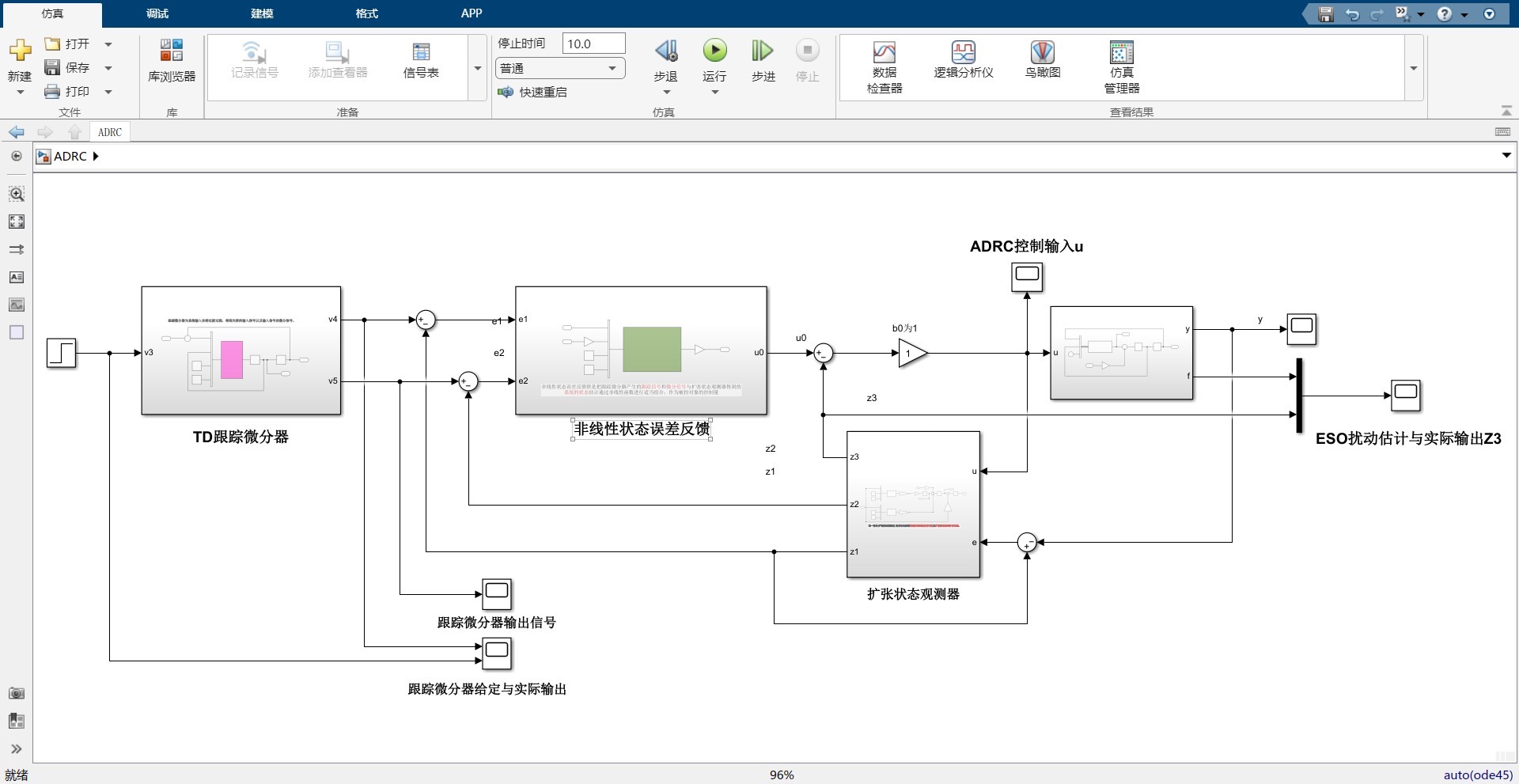
搭建ADRC仿真模型
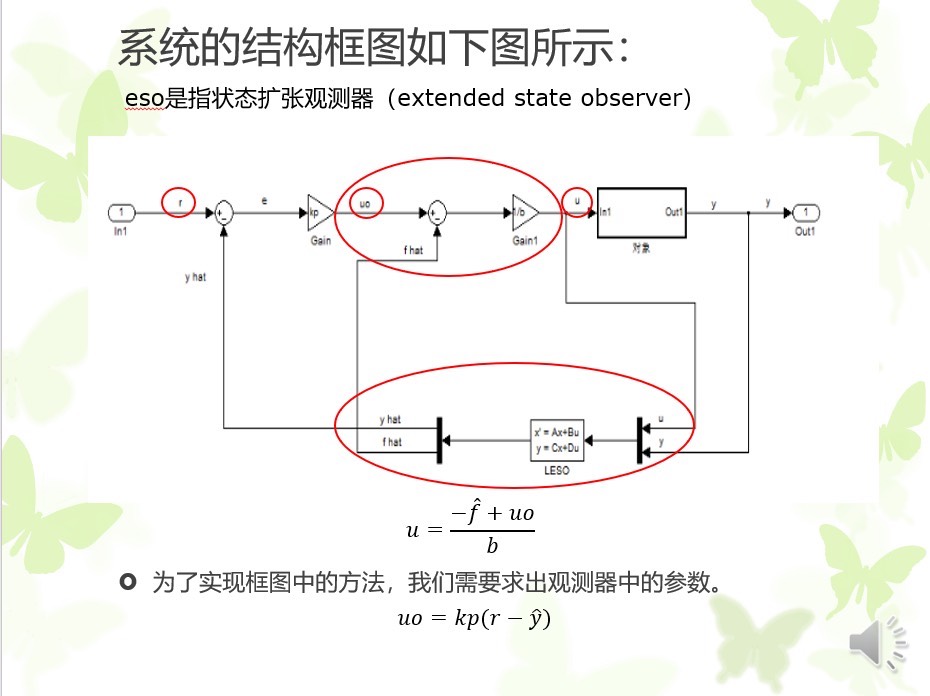
整个ADRC仿真模型主要由三个关键部分组成:跟踪微分器TD、非线性状态误差反馈律NLSEF以及扩张状态观测器ESO。
跟踪微分器TD
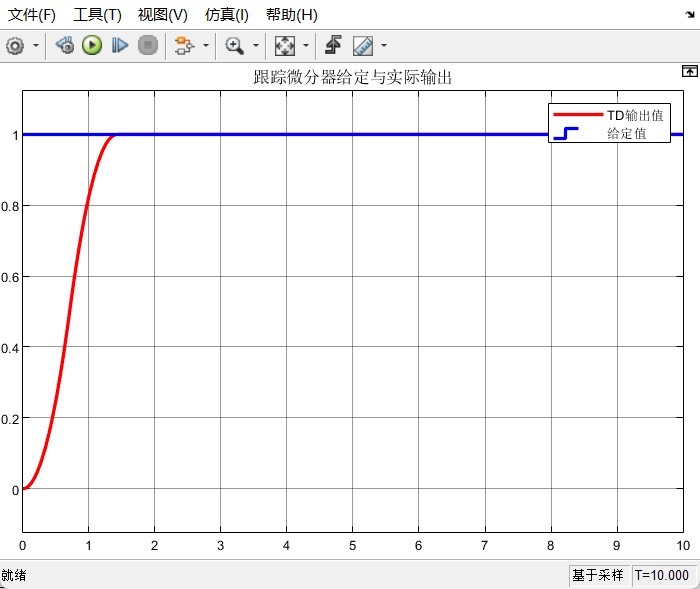
TD的职责是为系统输入安排过渡过程,最终输出光滑的输入信号以及该输入信号的微分信号。这就好比给输入信号铺了一条平滑的“跑道”,让它能更平稳地进入系统。
扩张状态观测器仿真——观察ADRC自抗干扰控制 搭建了ADRC自抗干扰控制的仿真模型,通过扩张状态的观测器进行观察估测: 跟踪微分器TD:为系统输入安排过渡过程,得到光滑的输入信号以及输入信号的微分信号。 非线性状态误差反馈律NLSEF:把跟踪微分器产生的跟踪信号和微分信号与扩张状态观测器得到的系统的状态估计通过非线性函数进行适当组合,作为被控对象的控制量。 扩张状态观测器ESO:作用是得到系统状态变量的估计值及扩张状态的实时作用量。 结果表明观测值与实际输出值相近,仿真能完美实现功能。 文件包括: [1]仿真模型 [2]扩张状态观测器介绍PPT [3]相关参考文献和书籍
想象一下,在一个简单的Python模拟中(以下代码仅为示意原理):
import numpy as np
import matplotlib.pyplot as plt
def tracking_differentiator(u, r, h):
# u是输入信号,r是速度因子,h是步长
x1 = 0
x2 = 0
x1_list = []
x2_list = []
for _ in range(100):
fhan = 0
d = r * h
d0 = h * d
y = x1 - u
a0 = np.sqrt(d * d + 8 * r * np.abs(y))
if np.abs(y) <= d0:
a = x2 + 0.5 * a0 * np.sign(y)
else:
a = x2 + d * np.sign(y)
if np.abs(a) <= d:
fhan = -r * a / d
else:
fhan = -r * np.sign(a)
x1 = x1 + h * x2
x2 = x2 + h * fhan
x1_list.append(x1)
x2_list.append(x2)
return x1_list, x2_list
u = 1 # 假设输入信号为1
r = 10 # 速度因子
h = 0.01 # 步长
x1_res, x2_res = tracking_differentiator(u, r, h)
plt.plot(x1_res, label='smooth input signal')
plt.plot(x2_res, label='differential signal')
plt.legend()
plt.show()在这段代码里,trackingdifferentiator函数通过不断迭代计算,实现了对输入信号u的处理,r和h参数会影响最终输出的信号特性。可以看到,x1list就是生成的光滑输入信号,x2_list则是对应的微分信号。
非线性状态误差反馈律NLSEF
NLSEF的活儿就是把TD产生的跟踪信号和微分信号,与ESO得到的系统状态估计,通过非线性函数进行巧妙组合,最终形成被控对象的控制量。它就像一个“智慧的调配师”,根据不同的信号情况,合理搭配出最合适的控制量。
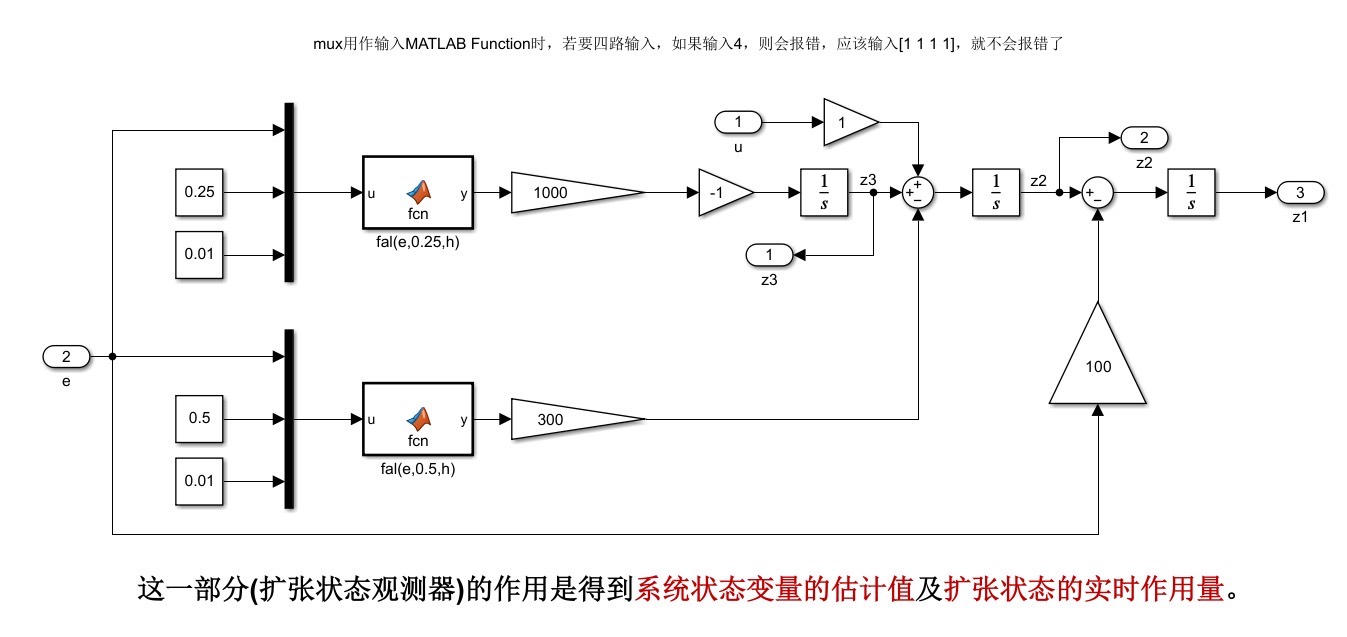
扩张状态观测器ESO
ESO的作用堪称关键,它能给出系统状态变量的估计值以及扩张状态的实时作用量。就好像给系统安上了一双“透视眼”,让我们能时刻掌握系统内部的状态变化。
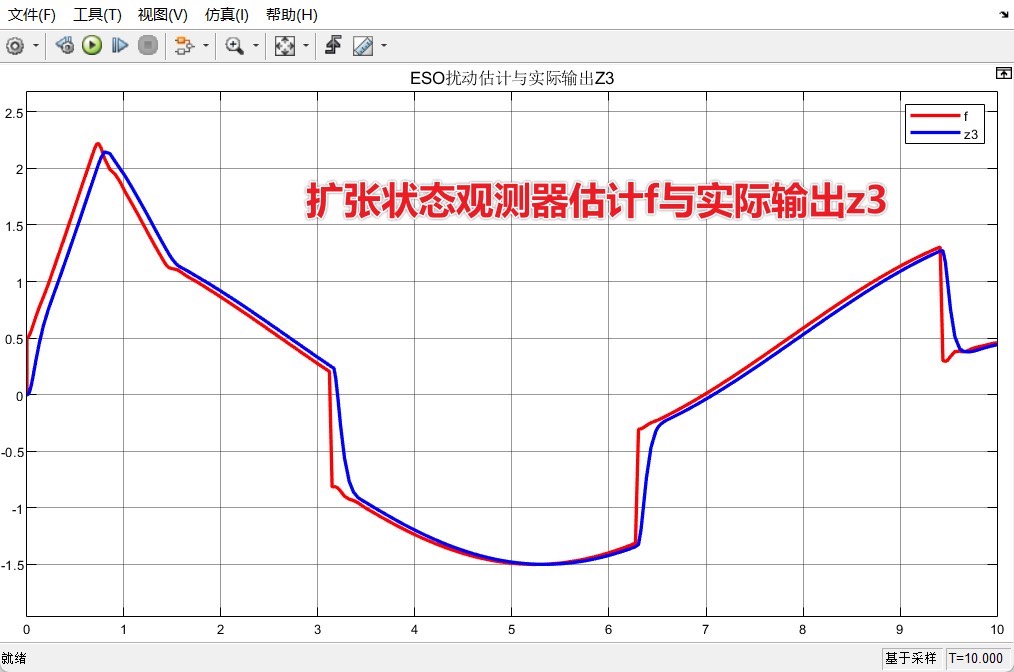
仿真结果
一番操作下来,最终的仿真结果那是相当令人满意。观测值和实际输出值非常相近,这意味着我们的仿真完美实现了ADRC自抗干扰控制的功能。从实际应用角度看,这就为各种复杂系统的控制提供了一种强大且有效的手段。
相关文件
本次探索涉及到的文件也给大家列出来啦:
- 仿真模型:这是整个仿真的核心载体,包含了我们搭建的各种结构和参数设置。
- 扩张状态观测器介绍PPT:对ESO进行了详细解读,从原理到应用,能帮你更好地理解这个关键部分。
- 相关参考文献和书籍:这些资料是深入研究的宝库,如果想对ADRC有更全面深入的了解,它们可都是好帮手。
希望通过这次分享,大家对基于扩张状态观测器的ADRC自抗干扰控制仿真有了更清晰的认识,一起在控制领域探索更多的可能吧!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 1
1 0
0- 0



 已为社区贡献29条内容
已为社区贡献29条内容

所有评论(0)