强烈推荐!transformer+卡尔曼滤波!新成果已登一区TOP
学术评价新风向,单纯刷榜、堆参数已成过去式,可解释、可信赖、能落地才是硬道理。而Transformer+卡尔曼滤波,正是这样一个完美契合新趋势的“王炸”组合。
它天然优势互补,极易催生新架构与新方法。应用场景广泛、需求迫切,加上方向新颖,无疑是片高潜力学术蓝海,非常适合发文。
本文整理了16篇transformer+卡尔曼滤波前沿论文给大家作参考,搞创新就得充分了解技术进展。这里面部分开源工作附上了代码,大家可复现作为baseline模型。
HiLO: High-Level Object Fusion for Autonomous Driving using Transformers
-
关键词: 高阶融合, 自动驾驶, Transformer, 跨域评估, 传感器融合
- 方法:
-
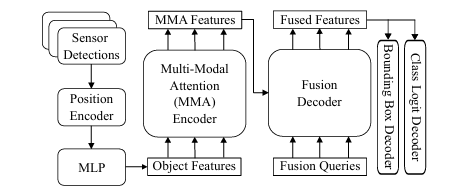
针对自动驾驶中多传感器(如摄像头、雷达)高阶(物体级别)数据融合的难题,传统卡尔曼滤波方法难以处理复杂的关联和不确定性。本文石破天惊地提出了名为
HiLO(High-Level Object Fusion) 的解决方案。它将多传感器检测到的物体列表视为一个序列,利用一个源自DETR的Transformer编码器-解码器架构,直接端到端地输出一个全局唯一的、融合后的物体列表,彻底革新了传统的目标关联与状态更新流程。
-
- 创新点:
-
提出了一种名为
HiLO的新型Transformer架构,首次实现了端到端的高阶(物体级别)多传感器数据融合。 -
创新地将高阶融合问题建模为集合预测任务,利用Transformer的注意力机制优雅地解决了多传感器目标关联与状态融合的难题。
-
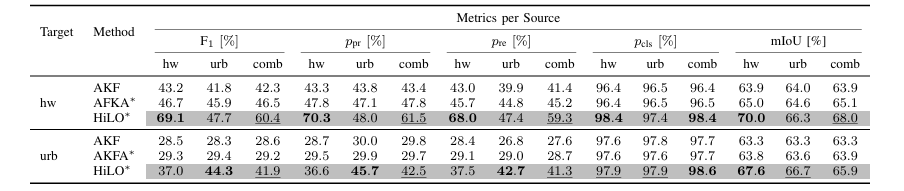
通过全面的跨域评估(在城市与高速公路场景间交叉测试),强力验证了模型在不同数据分布下的卓越性能和泛化能力。
-
实验结果堪称“碾压”:相较于改进的自适应卡尔曼滤波 (AKFA)方法,
HiLO的F1分数提升了惊人的25.9% ,mIoU提升6.1%,宣告了Transformer在该领域的绝对优势。
-
Sailing Towards Zero-Shot State Estimation using Foundation Models Combined with a UKF
-
关键词: 状态估计, 基础模型, 无迹卡尔曼滤波 (UKF), 零样本, 动力学建模
- 方法:
-
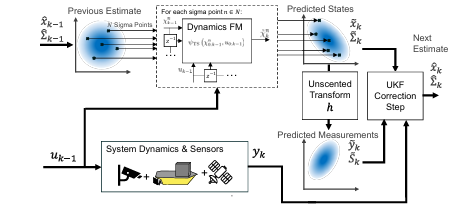
传统状态估计(如UKF)为每个新系统建模都需大量人力或数据,费时费力。本文提出了一种“即插即用”的革命性方案——**
FM-UKF** (Foundation Model Unscented Kalman Filter)。其核心思想是:用一个在海量不同动态系统上预训练的Transformer基础模型,来代替UKF中的手写动力学预测函数f(x, u)。这个强大的“动力学大脑”能零样本泛化到未见过的系统,而UKF则专注于利用已知的传感器模型进行量测更新。
-
- 创新点:
-
构建了
FM-UKF框架,将预训练的Transformer动力学基础模型与无迹卡尔曼滤波(UKF)无缝集成,实现了“学习”与“模型”的完美联姻。 -
创新地设计了混合估计流程:Transformer负责“黑盒”的动力学预测,UKF负责“白盒”的量测更新,一举解决了纯学习模型对新传感器泛化能力差的痛点。
-
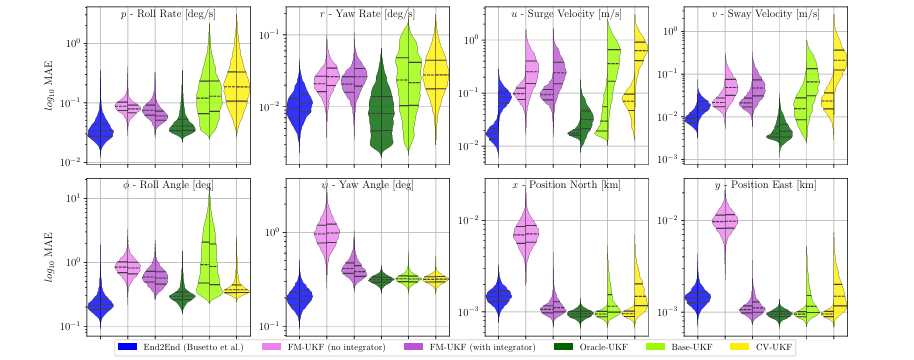
通过在成百上千个不同动力学系统上进行预训练,实现了对未知系统的零样本状态估计,将工程师从繁重的系统辨识工作中解放出来。
-
首次将动力学基础模型与卡尔曼滤波深度结合,验证了该方法在无需为新传感器重新训练的情况下,依然能达到媲美“先知”(拥有完美模型的Oracle-UKF)的惊人精度。
-
m3TrackFormer: Transformer-based mmWave Multi-Target Tracking with Lost Target Re-Acquisition Capability
-
关键词: 毫米波, 多目标追踪, Transformer, 目标重捕获, ISAC
- 方法:
-
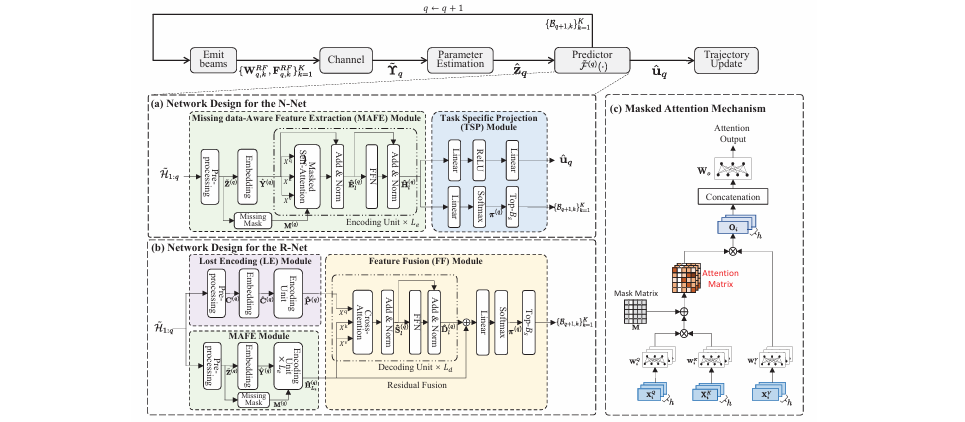
在毫米波追踪中,由于波束极窄,目标极易丢失,传统卡尔曼滤波对此束手无策。本文提出了“永不放弃”的
m3TrackFormer框架。它包含两种工作模式:N-Mode (正常追踪)下,一个编码器网络持续追踪;一旦目标丢失,立刻切换到R-Mode(重捕获),一个解码器网络被激活,它巧妙地利用“波束没打中”这一负向信息,调整搜索策略,像智能猎犬一样迅速找回丢失的目标。
-
- 创新点:
-
提出了一种创新的双模态(N-Mode/R-Mode)追踪框架
m3TrackFormer,赋予了追踪系统前所未有的“失而复得”能力。 -
创新地设计了
R-Net(重捕获网络),利用交叉注意力机制融合历史轨迹(正向信息)和波束错失事件(负向信息),解决了目标丢失后的“无头苍蝇”式搜索问题。 -
通过
MAFE(缺失数据感知特征提取) 模块中的掩码自注意力机制,直接处理不完整的轨迹序列,彻底告别了因数据插补而导致的误差累积。 -
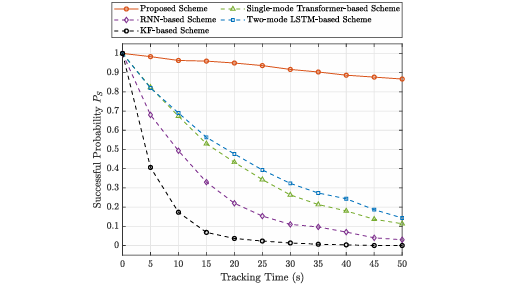
首次将Transformer应用于带有智能重捕获机制的毫米波追踪,在高动态场景下,相比传统的KF方案,**追踪时长提升超过130%**,实现了鲁棒性的代际跨越!
-
本文整理了16篇transformer+卡尔曼滤波前沿论文给大家作参考,搞创新就得充分了解技术进展。这里面部分开源工作附上了代码,大家可复现作为baseline模型。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 8
8 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)