【复现】基于Lyapunov非线性控制-模型预测控制(LMPC)与反步法+自主水下航行器(AUV)的轨迹跟踪控制附Matlab代码
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
👇 关注我领取海量matlab电子书和数学建模资料
🍊个人信条:格物致知,完整Matlab代码获取及仿真咨询内容私信。
🔥 内容介绍
一、AUV 轨迹跟踪控制的挑战
-
复杂水下环境影响:自主水下航行器(AUV)在水下运行时,面临着复杂多变的环境。海水的流动、温度和盐度的变化都会对 AUV 的运动产生影响。例如,海流可能会使 AUV 偏离预定轨迹,增加了精确跟踪目标轨迹的难度。此外,水下的压力变化也可能影响 AUV 的机械结构和传感器性能,进一步干扰其运动控制。
-
非线性动力学特性:AUV 的动力学模型具有高度非线性。其运动受到多个因素的相互作用,包括推进器产生的推力、水动力、重力和浮力等。这些力与 AUV 的位置、速度、姿态等状态变量之间的关系是非线性的,使得传统的基于线性模型的控制方法难以实现精确的轨迹跟踪。例如,AUV 在不同深度和速度下,水动力的变化会导致其动力学特性发生显著改变。
-
执行器约束问题:AUV 的推进器等执行器存在物理限制,如推力饱和。执行器无法提供无限大的推力,当控制需求超过执行器的能力时,传统控制方法可能会失效,导致轨迹跟踪误差增大,甚至使 AUV 失去控制。因此,在设计控制算法时,必须考虑执行器的这些实际约束条件。
二、Lyapunov 稳定性理论基础
-
稳定性概念:Lyapunov 稳定性理论为分析动态系统的稳定性提供了一种强大的工具。对于 AUV 的轨迹跟踪控制,稳定性意味着 AUV 能够在各种干扰和不确定性因素下,保持其运动状态接近期望轨迹。如果系统在受到微小扰动后,能够回到原来的平衡状态或保持在平衡状态附近,那么这个系统就是稳定的。
-
Lyapunov 函数:该理论通过构造一个 Lyapunov 函数 V(x) 来分析系统的稳定性,其中 x 是系统的状态变量。Lyapunov 函数通常具有非负性,即 V(x)≥0,并且在系统的平衡状态 x=0 时,V(0)=0。通过分析 Lyapunov 函数随时间的导数 V˙(x) 的符号,可以判断系统的稳定性。如果 V˙(x)≤0,则系统是稳定的;如果 V˙(x)<0,则系统是渐近稳定的,即随着时间的推移,系统状态会逐渐收敛到平衡状态。
三、模型预测控制(MPC)原理
-
预测与优化机制:模型预测控制是一种基于模型的控制策略,它通过建立系统的预测模型,预测系统在未来一段时间内的行为。在每个控制周期,MPC 根据当前系统状态和预测模型,求解一个优化问题,以确定当前时刻的最优控制输入。优化目标通常是使系统输出尽可能接近期望轨迹,同时考虑一些约束条件,如执行器饱和约束。
-
滚动时域策略:MPC 采用滚动时域策略,即在每个控制周期,只实施优化得到的控制序列中的第一个控制输入,然后在下一个控制周期,基于新的系统状态重新求解优化问题,得到新的控制序列。这种滚动优化的方式使得 MPC 能够实时响应系统状态的变化和外部干扰,具有较好的鲁棒性和适应性。
四、新型 LMPC 框架
-
结合 Lyapunov 理论与 MPC:基于 Lyapunov 稳定性理论开发的新型模型预测控制(LMPC)框架,将 Lyapunov 函数与 MPC 的优化过程相结合。通过构造合适的 Lyapunov 函数,在 MPC 的优化问题中引入与 Lyapunov 稳定性相关的约束条件,使得优化得到的控制输入不仅能使系统输出跟踪期望轨迹,还能从理论上保证闭环系统的稳定性。
-
考虑实际约束与协同优化:在 LMPC 框架中,可以显式考虑执行器饱和等实际约束条件。同时,它能与推力分配子问题协同优化,即在优化控制输入时,同时考虑如何合理分配推进器的推力,以满足系统的动力学要求和执行器约束。这样可以更有效地利用 AUV 的执行器资源,提高轨迹跟踪性能。
五、反步法构建收缩约束
-
反步控制律:反步法是一种逐步设计控制器的方法,它从系统的期望输出开始,逐步向后推导,设计出一系列的虚拟控制律和实际控制律。在 AUV 的轨迹跟踪控制中,反步法通过设计合适的控制律,使得系统的状态能够逐步跟踪期望轨迹。
-
构建收缩约束:借助非线性反步跟踪控制律,在 LMPC 问题中构建收缩约束。这些收缩约束基于 Lyapunov 稳定性理论,确保系统状态在每个控制周期内朝着期望轨迹收敛。通过这种方式,从理论上保证了闭环系统的稳定性,同时也为 LMPC 的优化问题提供了更严格的约束条件,有助于提高轨迹跟踪的精度。
六、递归可行性、闭环稳定性及吸引域
-
递归可行性:递归可行性是指在每个控制周期,MPC 的优化问题都有可行解。通过解析方法给出确保递归可行性的充分条件,保证了 LMPC 算法在实际运行过程中能够持续地计算出有效的控制输入,从而使 AUV 能够不断地调整其运动状态以跟踪期望轨迹。
-
闭环稳定性:基于 Lyapunov 稳定性理论和构建的收缩约束,通过分析给出了保证闭环系统稳定性的充分条件。这些条件确保了在 LMPC 的控制下,AUV 能够在各种干扰和不确定性因素下,保持稳定的轨迹跟踪性能,不会出现失控或发散的情况。
-
吸引域表征:显式表征了保证吸引域范围,即确定了系统初始状态的取值范围,使得在这个范围内,系统能够在 LMPC 的控制下收敛到期望轨迹。明确吸引域有助于在实际应用中合理设置 AUV 的初始状态,提高控制算法的可靠性和有效性。
![]()
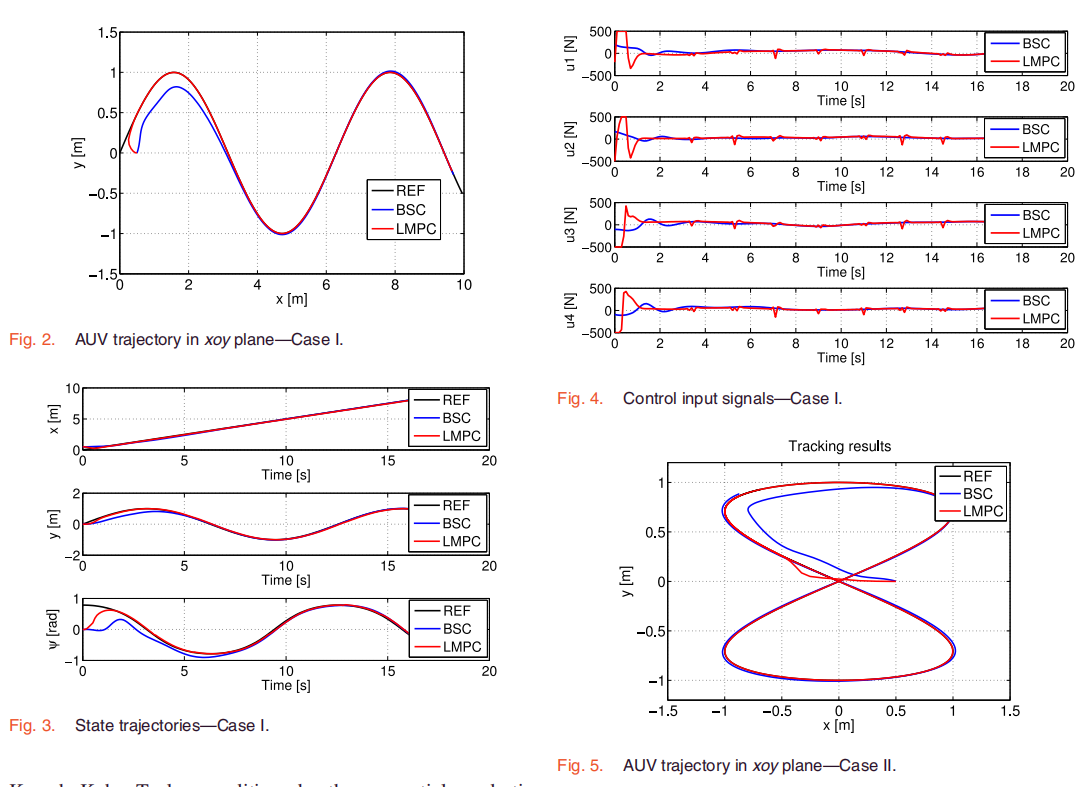
⛳️ 运行结果
![]()
📣 部分代码
![]()
🔗 参考文献
[1]徐博,左一兵,王朝阳,等.事件驱动量测-通信联合框架下基于LMPC的多AUV编队控制方法[J].[2026-03-25].
![]()
🍅往期回顾扫扫下方二维码

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 3
3 0
0- 0



 已为社区贡献50条内容
已为社区贡献50条内容

所有评论(0)