基于天棚控制原理的半主动悬架模型探索
基于天棚控制原理的半主动悬架模型 详细介绍:采用天棚阻尼控制的1/4主动悬架模型,以车身垂向加速度为控制目标,输入为B级随机路面,输出为车身垂向加速度、轮胎动载荷、悬架动挠度等平顺性评价指标,并计算了各个参数的均方根值。 软件: matlab/simulink 关键词:skyhook,天棚控制,半主动悬架,1/4车 包含:simulink源码文件,详细建模说明文档,对应参考资料,
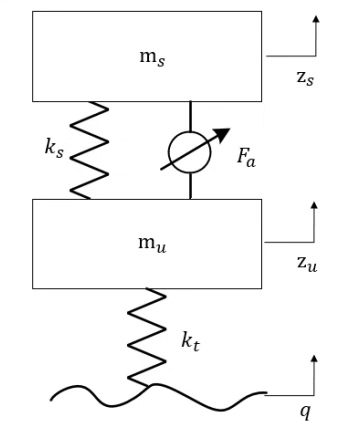
在汽车工程领域,悬架系统对于车辆的行驶平顺性和安全性起着至关重要的作用。今天咱们就来唠唠基于天棚控制原理的半主动悬架模型,这模型咱采用的是天棚阻尼控制的1/4主动悬架模型哦。
核心控制目标与输入输出
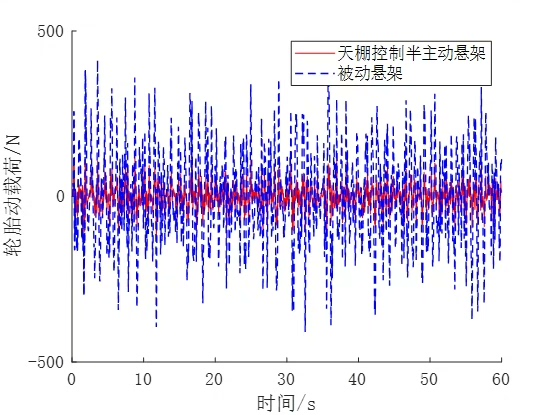
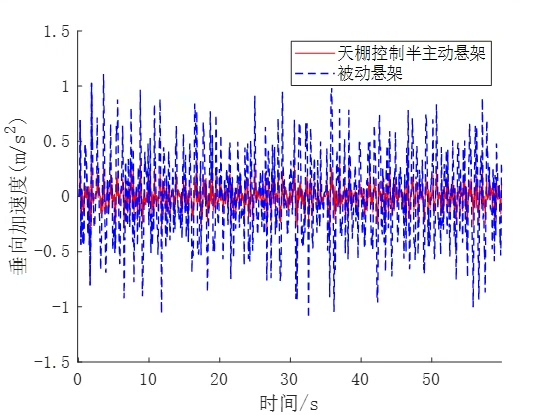
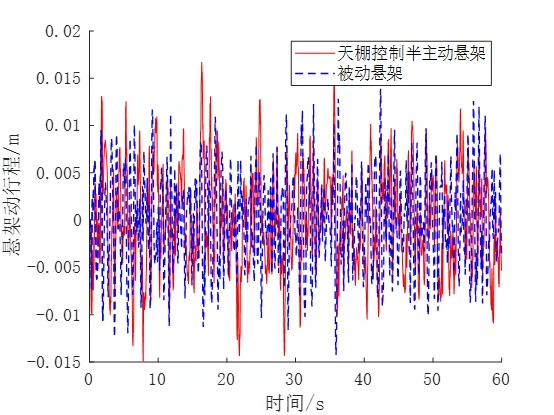
咱们这个模型把车身垂向加速度当作控制目标,输入呢是B级随机路面。这B级随机路面模拟了常见的实际路面状况,就好比给车子一个真实路况的“试炼场”。输出则是车身垂向加速度、轮胎动载荷、悬架动挠度这些关键的平顺性评价指标,还得计算各个参数的均方根值。通过均方根值,咱们就能更直观地评估这些参数在一段时间内的变化情况,衡量悬架系统的性能表现。
Matlab/Simulink搭建模型
这次建模咱们用的是Matlab/Simulink,这可是个超强大的工具。下面就简单看看怎么在Simulink里搭建这个模型。
模型搭建思路
先得创建几个关键模块,分别对应车身质量、悬架弹簧和阻尼、轮胎刚度这些物理部件。比如说车身质量模块,它就代表着车辆上部的质量,在Simulink里可以用一个简单的质量块来表示。悬架弹簧和阻尼模块则模拟了实际悬架的弹性和阻尼特性,轮胎刚度模块就是模拟轮胎与地面接触时的弹性表现。
代码示例(伪代码示意)
% 定义参数
m_body = 250; % 车身质量,单位kg
k_suspension = 20000; % 悬架弹簧刚度,单位N/m
c_suspension = 1000; % 悬架阻尼系数,单位Ns/m
k_tire = 200000; % 轮胎刚度,单位N/m
% 路面输入设置(模拟B级随机路面)
road_profile = generate_random_road_profile();
% 模型计算循环(简单示意动力学计算)
for time = 0:0.01:10 % 时间从0到10秒,步长0.01秒
% 计算悬架力
suspension_force = k_suspension * (z_body - z_wheel) + c_suspension * (dz_body - dz_wheel);
% 计算轮胎力
tire_force = k_tire * (z_wheel - road_profile(time));
% 根据牛顿第二定律计算车身加速度
a_body = (suspension_force - m_body * 9.8) / m_body;
% 更新车身和车轮的位置与速度(简化示意)
dz_body = dz_body + a_body * 0.01;
z_body = z_body + dz_body * 0.01;
dz_wheel = dz_wheel + (suspension_force - tire_force) / m_wheel * 0.01;
z_wheel = z_wheel + dz_wheel * 0.01;
end上面这段代码简单展示了模型中的一些关键参数定义和动力学计算过程。定义好车身质量、悬架弹簧刚度等参数后,通过循环模拟时间推进,在每个时间步长里计算悬架力、轮胎力,再根据牛顿第二定律算出车身加速度,最后更新车身和车轮的位置与速度。当然,实际在Simulink里搭建会用到各种模块来实现这些功能,会更加直观和模块化。
模型输出与指标计算
模型输出的车身垂向加速度、轮胎动载荷、悬架动挠度这些指标,能让咱们清楚了解车辆在行驶过程中的平顺性表现。计算均方根值代码如下:
% 计算车身垂向加速度均方根值
rms_a_body = sqrt(mean(a_body.^2));
% 计算轮胎动载荷均方根值
rms_tire_force = sqrt(mean(tire_force.^2));
% 计算悬架动挠度均方根值
rms_suspension_deflection = sqrt(mean((z_body - z_wheel).^2)); 通过这些均方根值,咱们就能量化评估悬架系统性能。数值越小,说明对应的参数波动越小,车辆行驶平顺性越好。
资源分享
这次研究提供了Simulink源码文件,大家可以直接在Matlab里打开研究,看看具体的模块连接和参数设置。还有详细建模说明文档,一步一步讲解了模型是怎么搭建起来的,每个模块的作用是什么。另外,也附上了对应参考资料,方便大家深入研究天棚控制、半主动悬架这些知识。希望对这方面感兴趣的小伙伴们能从中有所收获,一起探索汽车悬架系统的奥秘。
基于天棚控制原理的半主动悬架模型 详细介绍:采用天棚阻尼控制的1/4主动悬架模型,以车身垂向加速度为控制目标,输入为B级随机路面,输出为车身垂向加速度、轮胎动载荷、悬架动挠度等平顺性评价指标,并计算了各个参数的均方根值。 软件: matlab/simulink 关键词:skyhook,天棚控制,半主动悬架,1/4车 包含:simulink源码文件,详细建模说明文档,对应参考资料,
#skyhook #天棚控制 #半主动悬架 #1/4车

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 3
3 0
0- 0



 已为社区贡献23条内容
已为社区贡献23条内容

所有评论(0)