PSIM中单相并网逆变器双环控制系统探索
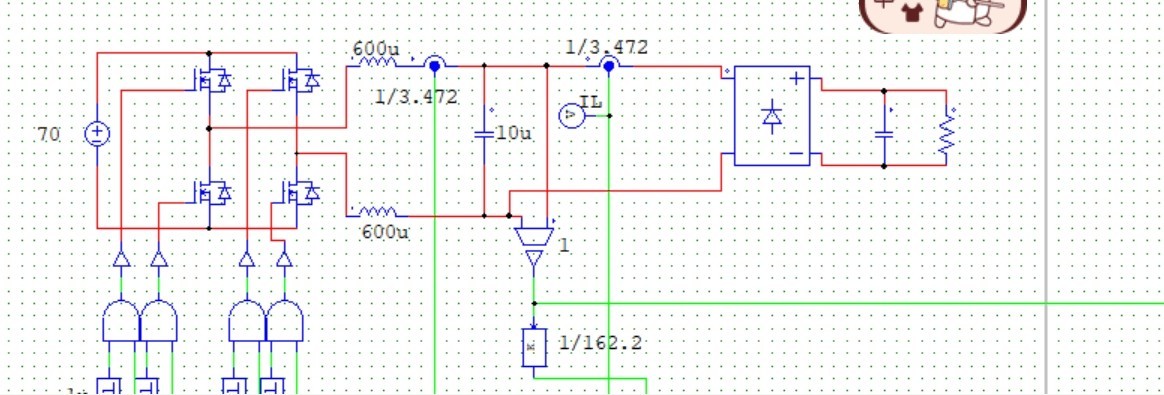
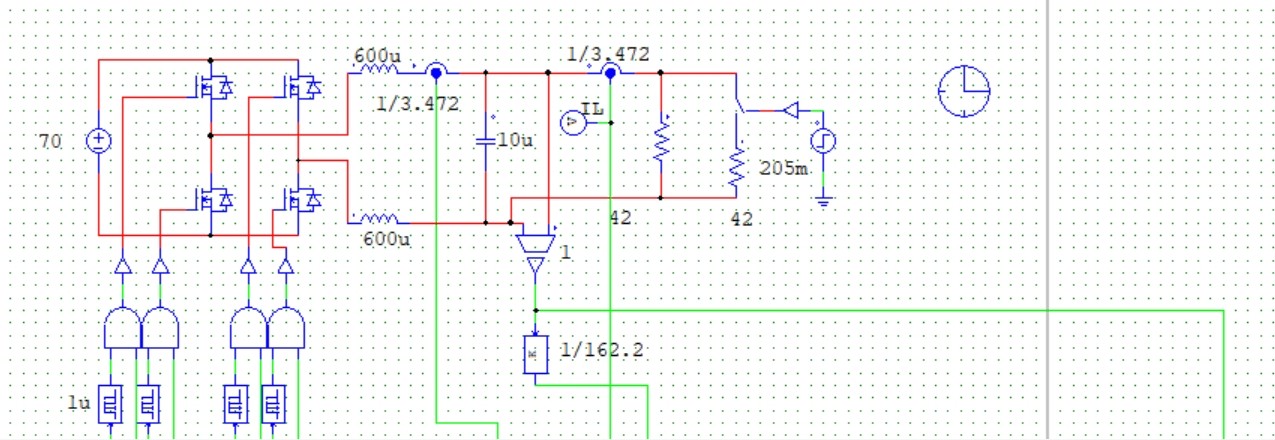
PSIM中搭建的虚拟阻抗单相并网逆变器双环控制系统 外环采用PI控制器,内环采用QPR控制,加入虚拟阻抗环节 有两种负载,一种是线性负载,一种是非线性负载 实验模型可以烧录至dsp,有对应的实验模型 模型仅供学习和参考仅包模型可以正常运行,得到图示结果
在电力电子领域,逆变器的控制策略一直是研究的热点。今天咱就唠唠在PSIM里搭建的虚拟阻抗单相并网逆变器双环控制系统,这玩意儿可有点意思。
双环控制策略
咱这系统采用了经典的双环控制,外环用PI控制器,内环则是QPR控制,还加了个虚拟阻抗环节。为啥这么设计呢?听我慢慢道来。
外环PI控制
外环采用PI控制器,它主要负责对逆变器输出电压的幅值和相位进行精准调控。在代码实现上,大概像这样:
Kp = 0.5; % 比例系数
Ki = 0.1; % 积分系数
error = reference - feedback; % 参考值与反馈值的误差
integral = integral + error * dt; % 积分项计算
output = Kp * error + Ki * integral; % PI控制器输出这里的 reference 就是我们期望的输出值,feedback 是实际反馈回来的值。Kp 和 Ki 分别是比例系数和积分系数,这俩参数得精心调,就像炒菜把握盐和醋的量一样,多一分少一分都影响最终效果。比例环节能快速响应误差变化,积分环节则负责消除稳态误差,二者相辅相成,让输出紧紧跟随参考值。
内环QPR控制
内环的QPR(准比例谐振)控制主要用来对付电流的谐波问题,让输出电流更正弦。代码实现思路大概如下:
omega0 = 2 * pi * 50; % 基波角频率
kq = 100; % QPR控制器增益
kp = 0.1; % 比例系数
s = tf('s');
QPR = kq * s / (s^2 + omega0 * s / Q + omega0^2) + kp; % QPR控制器传递函数这段代码里,先设定了基波角频率 omega0,这里是50Hz交流电的角频率。kq 是QPR控制器的增益,它决定了对特定频率谐波的抑制能力。kp 是比例系数,和PI里的比例系数类似,辅助控制。通过构建 QPR 这个传递函数,就能对电流中的谐波进行有效抑制,让输出电流更接近理想的正弦波。
虚拟阻抗环节
虚拟阻抗环节的加入,主要是为了改善逆变器输出特性,增强系统稳定性。比如说在并联逆变器系统中,它能有效抑制环流。虽然代码实现相对复杂点,但原理不难理解,简单讲就是通过算法模拟出一个阻抗特性,对逆变器输出进行调节。
两种负载情况
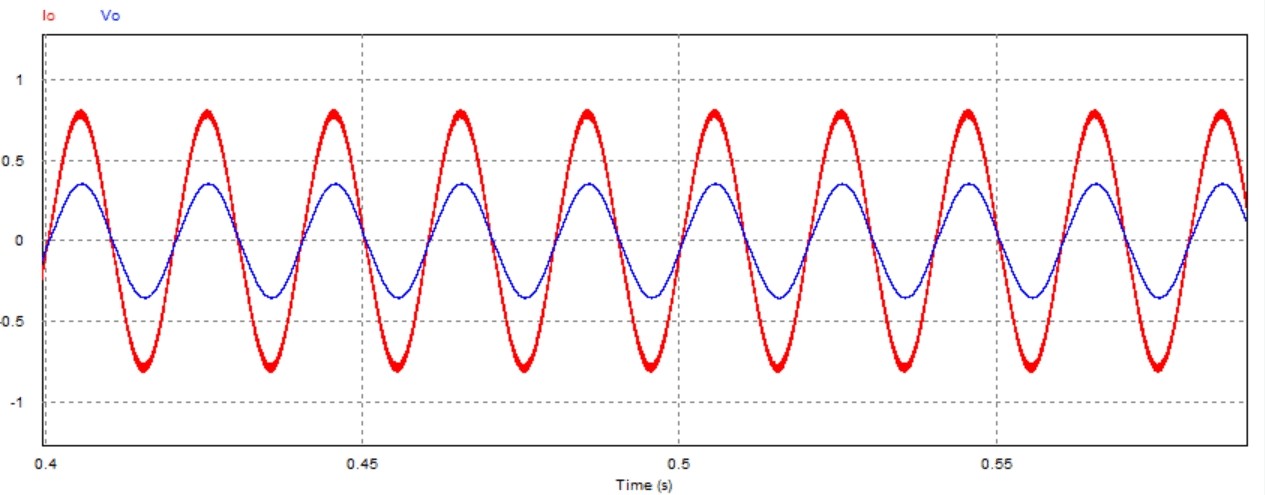
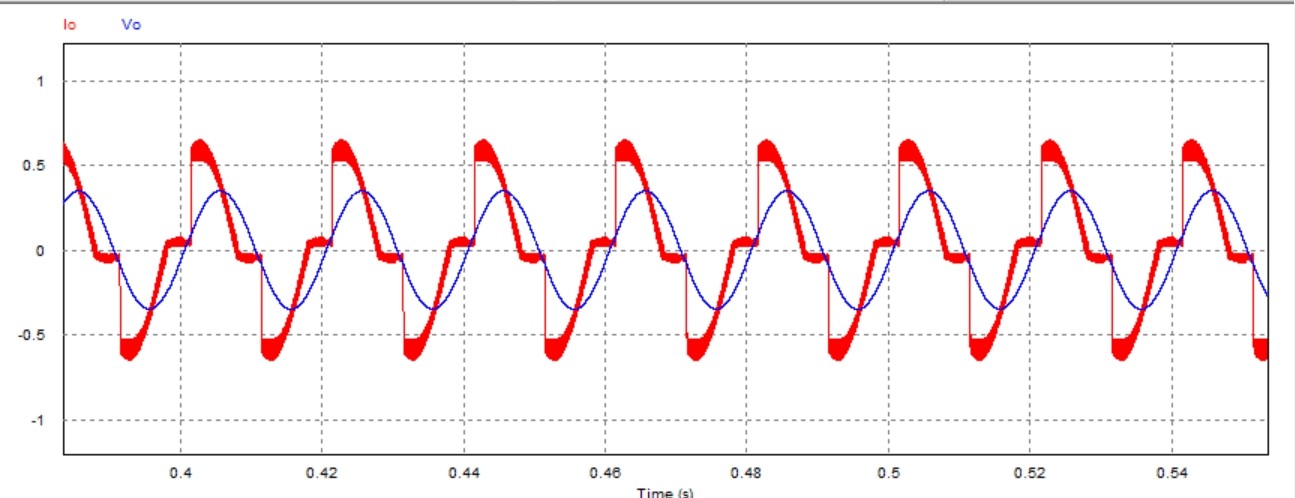
这系统支持两种负载,线性负载和非线性负载。线性负载就像电阻、电感、电容这些规规矩矩按欧姆定律来的家伙,处理起来相对容易。而非线性负载,像二极管整流器、变频器这些,会产生大量谐波,对逆变器的控制策略是个不小的挑战。但咱这双环控制系统加上虚拟阻抗环节,就能较好地应对这两种情况。
实验模型及烧录
这实验模型可以烧录到DSP(数字信号处理器)里实际运行。通过将模型转化为DSP能识别的代码,就能在实际硬件平台上进行测试。具体的烧录过程因DSP型号而异,不过大致思路就是把模型编译生成的可执行文件,通过专门的烧录工具写入DSP的存储芯片里。
PSIM中搭建的虚拟阻抗单相并网逆变器双环控制系统 外环采用PI控制器,内环采用QPR控制,加入虚拟阻抗环节 有两种负载,一种是线性负载,一种是非线性负载 实验模型可以烧录至dsp,有对应的实验模型 模型仅供学习和参考仅包模型可以正常运行,得到图示结果
这模型仅供学习和参考,能保证正常运行,并且能得到图示结果。通过这些结果,我们可以分析系统在不同负载下的性能,比如输出电压的稳定性、电流的谐波含量等等,为进一步优化控制策略提供依据。
总之,在PSIM里搭建的这个虚拟阻抗单相并网逆变器双环控制系统,无论是从理论研究还是实际应用角度,都有不少值得探索的地方。希望这篇博文能给对这块感兴趣的小伙伴一些启发。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 6
6 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)