分布式驱动电动汽车上下层复合制动控制仿真探秘
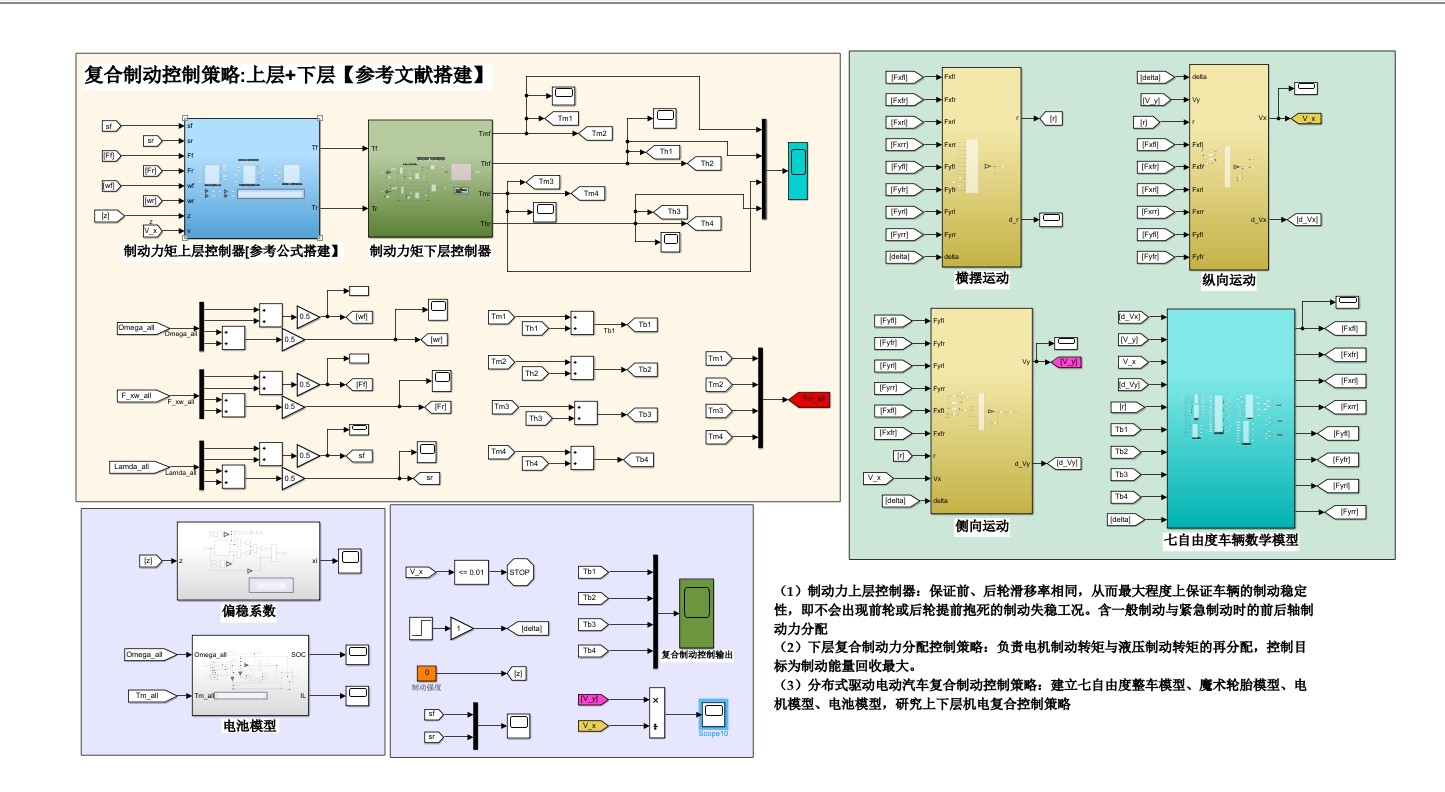
分布式驱动电动汽车上下层复合制动控制仿真 附带参考文献复合控制都是参考文献公式搭建的 [1]制动力上层控制器:保证前、后轮滑移率相同,从而最大程度上保证车辆的制动稳定性,即不会出现前轮或后轮提前抱死的制动失稳工况。 含一般制动与紧急制动时的前后轴制动力分配 [2]下层复合制动力分配控制策略:负责电机制动转矩与液压制动转矩的再分配,控制目标为制动能量回收最大。 [3]分布式驱动电动汽车复合制动控制策略:建立七自由度整车模型、魔术轮胎模型、电机模型、电池模型,研究上下层机电复合控制策略 需要资料可以直接 一直都有资料~ 商品的展示图与资料一致对应
在电动汽车的发展浪潮中,制动控制技术是保障车辆安全与高效运行的关键一环。今天咱们就来聊聊分布式驱动电动汽车上下层复合制动控制仿真这一有趣又重要的领域。
制动力上层控制器:稳定性的捍卫者
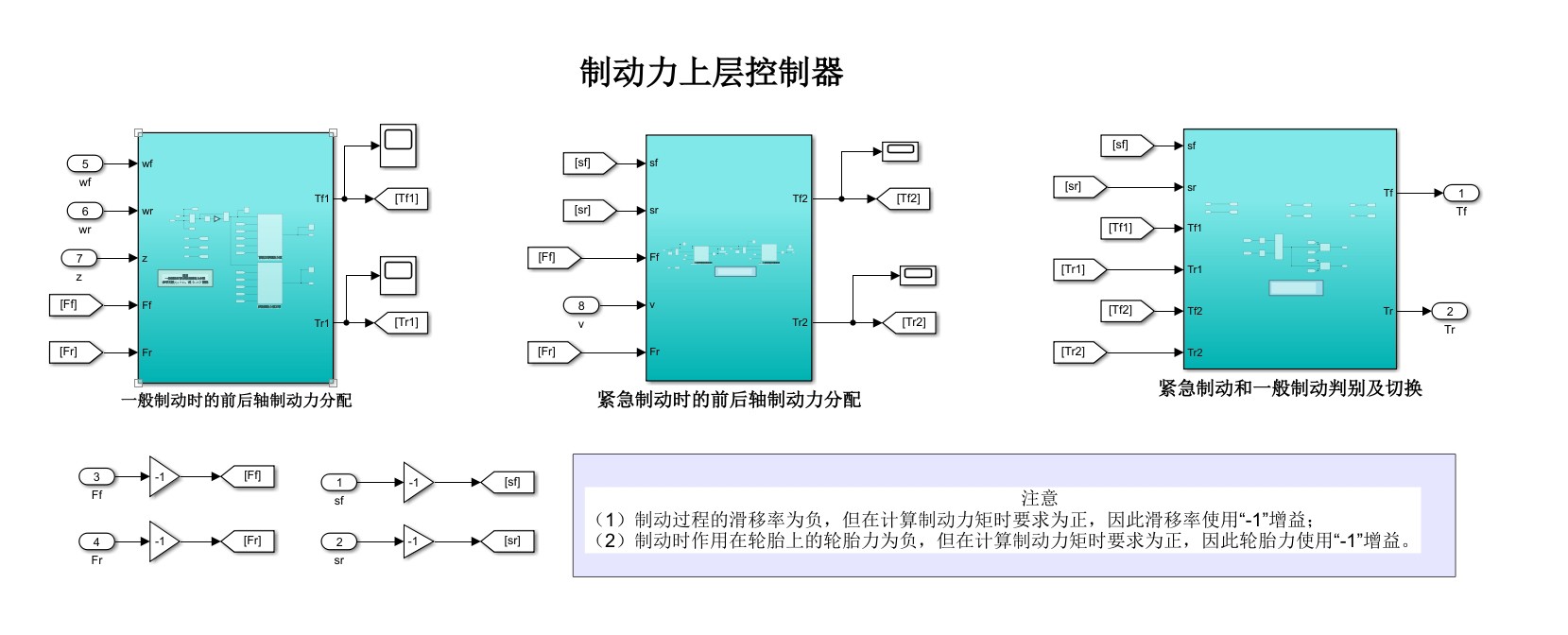
制动力上层控制器的核心使命,是确保前、后轮滑移率相同,以此最大程度保障车辆制动时的稳定性,避免前轮或后轮提前抱死导致制动失稳。这就好比给车辆的制动系统安上了一个“稳定器”。
在一般制动和紧急制动时,前后轴制动力分配尤为关键。这里涉及到一些根据参考文献公式搭建的算法。咱们简单用伪代码示意一下:
# 假设车辆总制动力为total_brake_force
# 前后轴制动力分配系数分别为front_ratio和rear_ratio
total_brake_force = get_total_brake_force()
front_ratio = calculate_front_ratio()
rear_ratio = calculate_rear_ratio()
front_brake_force = total_brake_force * front_ratio
rear_brake_force = total_brake_force * rear_ratio在这段伪代码里,gettotalbrakeforce()函数是获取车辆所需的总制动力,这可能基于车辆的速度、减速度等因素计算得出。calculatefrontratio() 和 calculaterear_ratio() 则是依据车辆的动力学特性、载荷分布等通过参考文献里的公式算出前后轴制动力分配系数。这样就能精准地把总制动力分配到前后轴,维持车辆制动稳定性。
下层复合制动力分配控制策略:能量回收的大师
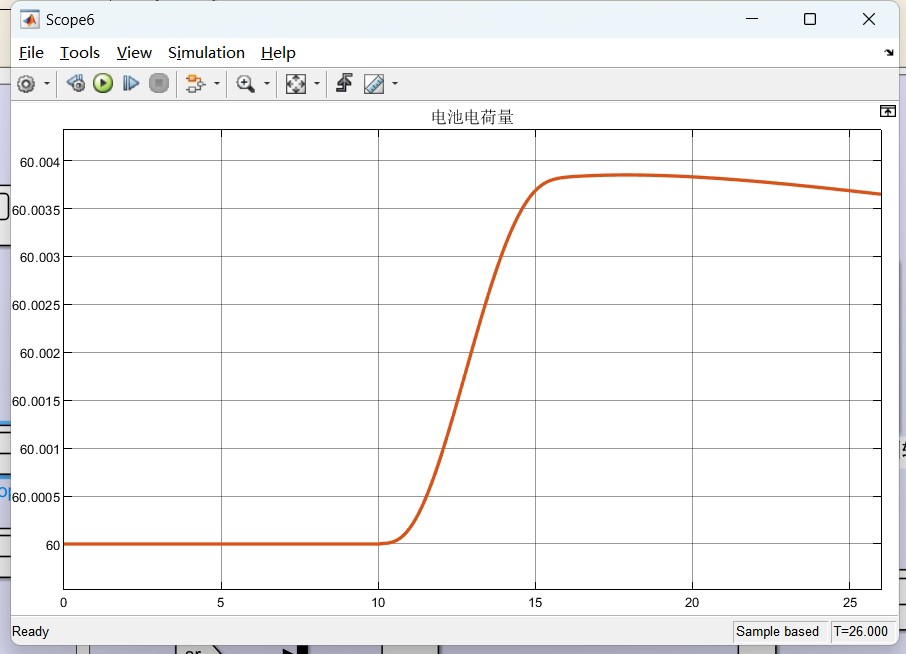
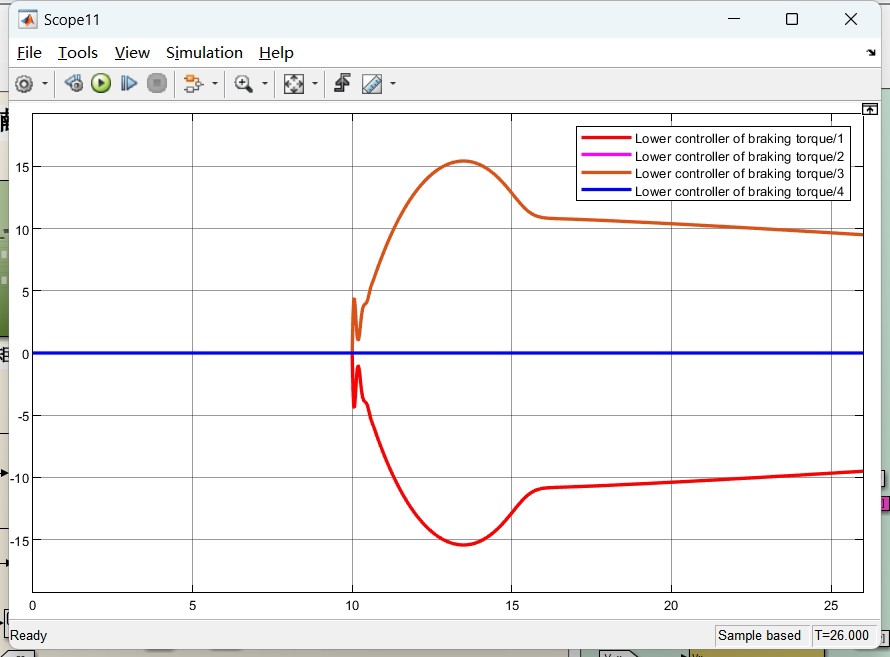
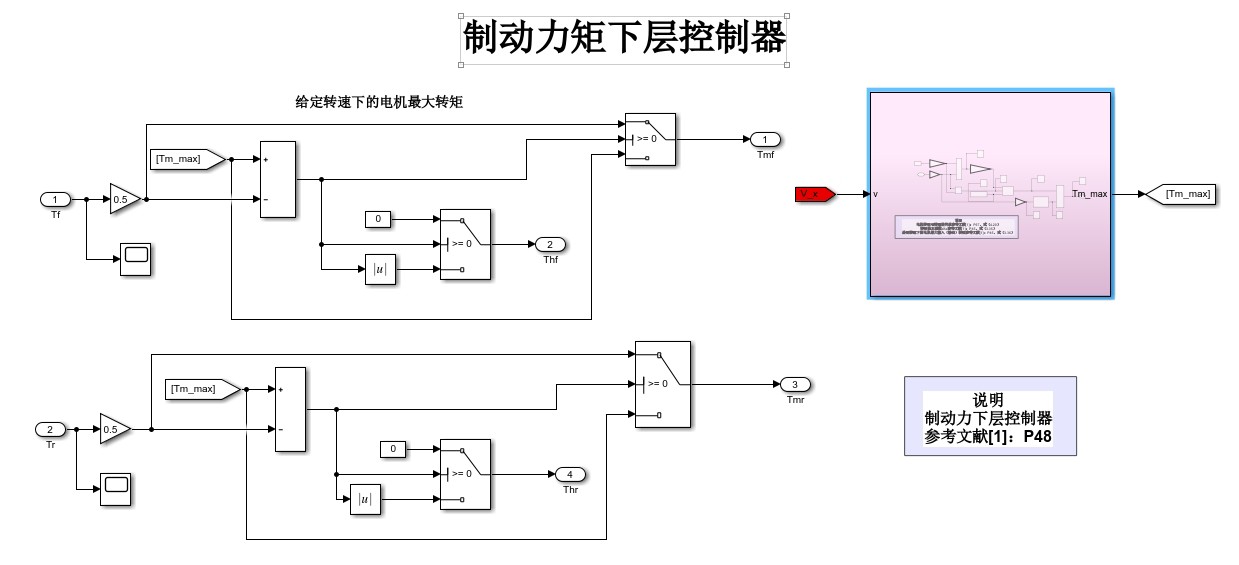
下层复合制动力分配控制策略,聚焦于电机制动转矩与液压制动转矩的再分配,目标是实现制动能量回收的最大化。这就像是给电动汽车装上了一个“能量收集器”,把制动过程中原本浪费的能量收集起来再利用。
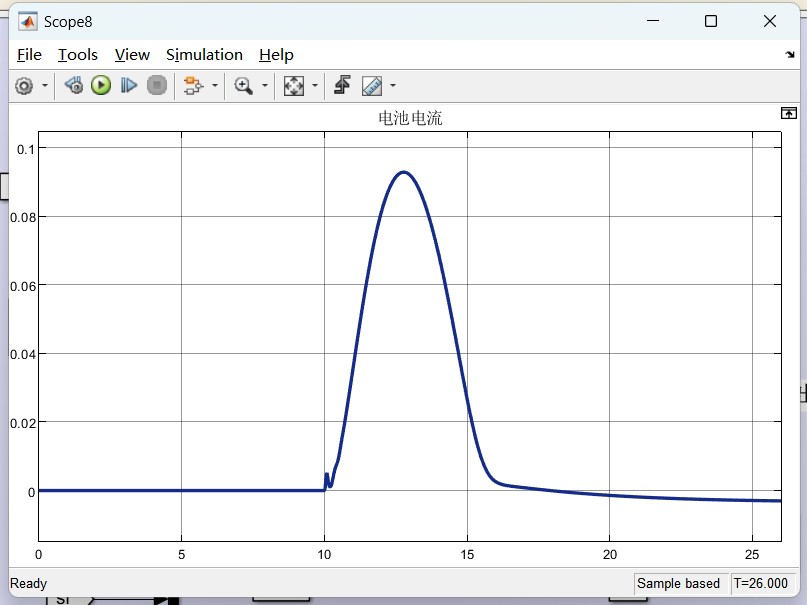
想象一下,车辆制动时,电机可以反向旋转,将车辆的动能转化为电能储存起来。咱们看段简单代码示例(以Python模拟电机和液压制动转矩分配):
# 假设总需求制动转矩为total_required_torque
# 电机最大可提供制动转矩为max_motor_torque
total_required_torque = get_required_torque()
max_motor_torque = get_max_motor_torque()
if total_required_torque <= max_motor_torque:
motor_torque = total_required_torque
hydraulic_torque = 0
else:
motor_torque = max_motor_torque
hydraulic_torque = total_required_torque - max_motor_torque在这段代码里,getrequiredtorque()获取车辆制动所需的总转矩,getmaxmotor_torque()得到电机能够提供的最大制动转矩。如果总需求转矩小于等于电机最大可提供转矩,那就让电机全包揽制动任务,实现最大程度的能量回收;要是总需求转矩大于电机最大转矩,电机先出全力,剩下的由液压制动系统补上。
分布式驱动电动汽车复合制动控制策略:模型构建与策略融合
要实现上述上下层机电复合控制策略,得建立一系列模型,包括七自由度整车模型、魔术轮胎模型、电机模型、电池模型等。这些模型就像是搭建一座高楼的基石。
分布式驱动电动汽车上下层复合制动控制仿真 附带参考文献复合控制都是参考文献公式搭建的 [1]制动力上层控制器:保证前、后轮滑移率相同,从而最大程度上保证车辆的制动稳定性,即不会出现前轮或后轮提前抱死的制动失稳工况。 含一般制动与紧急制动时的前后轴制动力分配 [2]下层复合制动力分配控制策略:负责电机制动转矩与液压制动转矩的再分配,控制目标为制动能量回收最大。 [3]分布式驱动电动汽车复合制动控制策略:建立七自由度整车模型、魔术轮胎模型、电机模型、电池模型,研究上下层机电复合控制策略 需要资料可以直接 一直都有资料~ 商品的展示图与资料一致对应
七自由度整车模型可以较为全面地描述车辆在各个方向上的运动状态,魔术轮胎模型则能精准模拟轮胎与地面的复杂力学关系。电机模型和电池模型则分别刻画电机的制动特性和电池的充放电能力。
例如在电机模型中,可能会有这样一段代码(简化的电机转矩计算):
# 假设电机转速为motor_speed
# 电机转矩常数为torque_constant
motor_speed = get_motor_speed()
torque_constant = get_torque_constant()
motor_torque = torque_constant * motor_speed这里通过电机转速和转矩常数来计算电机转矩,为下层制动力分配提供关键数据。
通过这些模型的协同工作,上下层机电复合控制策略才能得以有效实现,让分布式驱动电动汽车在制动性能、能量回收和行驶稳定性等方面达到一个理想的平衡。
总之,分布式驱动电动汽车上下层复合制动控制仿真,是一个充满挑战与机遇的领域,通过合理的模型搭建和控制策略设计,为电动汽车的发展注入强大动力。希望今天的分享能让大家对这一领域有更清晰的认识,咱们一起期待电动汽车制动技术的更多突破!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 9
9 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)