基于地棚控制原理的半主动悬架模型探索
基于地棚控制原理的半主动悬架模型 详细介绍:采用地棚阻尼控制的1/4主动悬架模型,以车身垂向加速度为控制目标,输入为B级随机路面,输出为车身垂向加速度、轮胎动载荷、悬架动挠度等平顺性评价指标,并计算了各个参数的均方根值。 软件: matlab/simulink 关键词:groundhook,地棚控制,半主动悬架,1/4车 包含:simulink源码文件,详细建模说明文档,对应参考资料,
在汽车悬架系统的研究领域,基于地棚控制原理的半主动悬架模型是一个备受关注的方向。今天就来跟大家详细唠唠这个基于地棚控制原理的 1/4 主动悬架模型。
一、地棚控制原理简介
地棚控制(Groundhook)的概念很有意思,它假设车辆悬架系统连接到一个虚拟的“地面”,通过调整阻尼力来模拟这个连接到理想地面的效果,从而改善车辆的行驶平顺性。简单来说,就是通过巧妙的算法去调节悬架的阻尼,让车在不同路面上都能尽可能平稳行驶。
二、1/4 主动悬架模型搭建
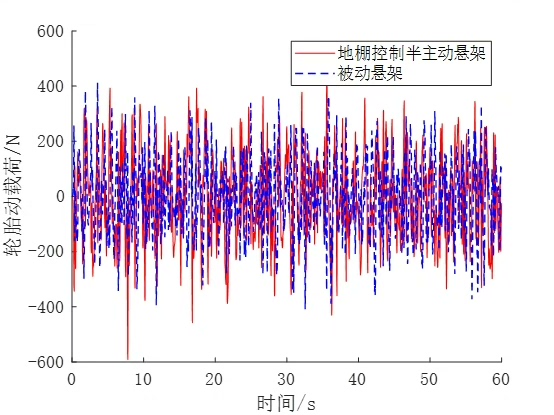
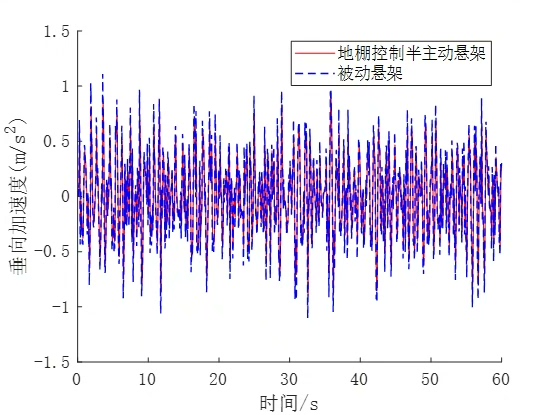
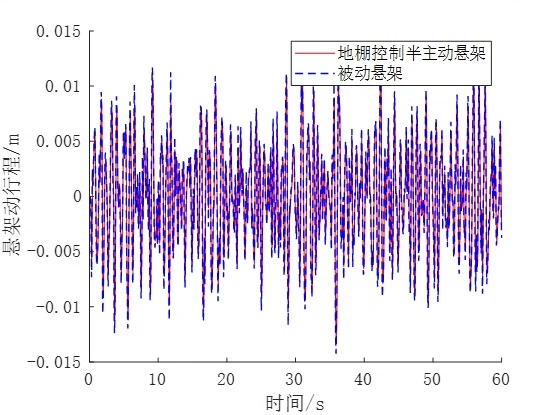
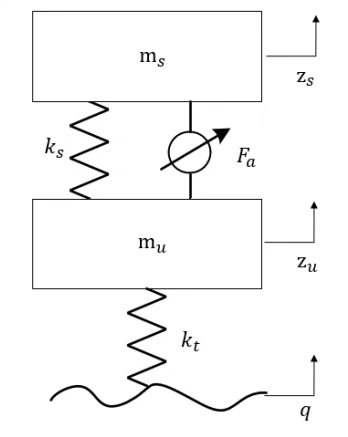
我们采用的是 1/4 主动悬架模型,为啥是 1/4 呢?这是因为它只考虑了车辆四个车轮中的一个,简化了模型同时又能很好地反映悬架的基本特性。在这个模型里,以车身垂向加速度作为控制目标,输入是 B 级随机路面。这里的 B 级随机路面就好比是我们实际开车时会遇到的那种不太平整,但也不是超级颠簸的路面状况。输出则是车身垂向加速度、轮胎动载荷、悬架动挠度等平顺性评价指标,通过这些指标,我们就能清晰了解悬架系统在这种路面输入下的工作表现。
三、Matlab/Simulink 实现及代码分析
我们借助 Matlab/Simulink 这个强大的工具来完成建模。以下是一些关键部分的 Simulink 模型搭建和对应代码分析。
路面输入模块
在 Simulink 里,我们可以使用一些自带的模块来模拟 B 级随机路面输入。比如说,可能会用到“Random Process Generator”模块,设置合适的参数来生成符合 B 级路面特性的随机信号。
% 这里假设用自定义函数来生成B级路面信号
function road_profile = generate_B_road_profile(time)
% 简单示例,实际参数需根据标准B级路面特性调整
amplitude = 0.01;
frequency = 1;
road_profile = amplitude * sin(2 * pi * frequency * time);
end这段代码通过简单的正弦函数模拟了一个类似 B 级路面的波动信号,实际应用中会更复杂,需要更精确的参数来符合真实 B 级路面的功率谱密度等特性。
悬架动力学模块
这部分主要是对悬架系统的动力学进行建模。我们知道,悬架系统包含弹簧、阻尼器等元件,它们的相互作用决定了车身的运动。
% 定义悬架动力学方程参数
m_s = 200; % 簧载质量
m_u = 50; % 非簧载质量
k_s = 20000; % 悬架弹簧刚度
k_t = 200000; % 轮胎刚度
c_s = 1000; % 悬架阻尼系数
% 悬架动力学方程
function dx = suspension_dynamics(t, x, road_profile)
z_s = x(1); % 簧载质量位移
z_u = x(2); % 非簧载质量位移
dz_s = x(3); % 簧载质量速度
dz_u = x(4); % 非簧载质量速度
% 簧载质量加速度
ddz_s = (-k_s * (z_s - z_u) - c_s * (dz_s - dz_u)) / m_s;
% 非簧载质量加速度
ddz_u = (k_s * (z_s - z_u) + c_s * (dz_s - dz_u) - k_t * (z_u - road_profile)) / m_u;
dx = [dz_s; dz_u; ddz_s; ddz_u];
end这段代码定义了悬架系统的动力学方程,通过质量、刚度和阻尼等参数来计算簧载质量和非簧载质量的加速度、速度和位移,这是模拟悬架实际运动的核心部分。
地棚控制算法模块
这是实现地棚控制的关键。我们要根据车身和车轮的运动状态来调整阻尼力。
% 地棚控制算法
function c_control = groundhook_control(dz_s, dz_u, z_s, z_u, k_s)
% 地棚阻尼系数计算
c_groundhook = 2 * sqrt(m_s * k_s);
% 根据车身和车轮速度关系调整阻尼力
if dz_s > dz_u
c_control = c_groundhook;
else
c_control = 0;
end
end这段代码实现了简单的地棚控制算法,根据车身和车轮的速度来决定阻尼力的大小,当车身速度大于车轮速度时,采用地棚阻尼系数,否则将阻尼力设为 0,以此来优化悬架的减振效果。
四、输出指标及均方根值计算
最后,我们通过模型输出车身垂向加速度、轮胎动载荷、悬架动挠度等平顺性评价指标。并且为了更直观地评估悬架系统在不同工况下的稳定性和性能,我们会计算各个参数的均方根值。
% 计算均方根值示例函数
function rms_value = calculate_rms(data)
rms_value = sqrt(mean(data.^2));
end这个函数很简单,就是对输入的数据计算均方根值,这样我们就能用一个数值来代表一段时间内参数的波动情况,从而更好地比较不同条件下悬架系统的性能。
五、资源分享
本次研究包含 Simulink 源码文件、详细建模说明文档以及对应参考资料。源码文件可以让大家直接在 Matlab/Simulink 里运行和修改模型,详细建模说明文档会一步步教你怎么搭建模型以及每个模块的作用,参考资料则能帮助你更深入了解地棚控制和半主动悬架的理论知识。希望这些资源能帮助大家在这个领域进一步探索。
基于地棚控制原理的半主动悬架模型 详细介绍:采用地棚阻尼控制的1/4主动悬架模型,以车身垂向加速度为控制目标,输入为B级随机路面,输出为车身垂向加速度、轮胎动载荷、悬架动挠度等平顺性评价指标,并计算了各个参数的均方根值。 软件: matlab/simulink 关键词:groundhook,地棚控制,半主动悬架,1/4车 包含:simulink源码文件,详细建模说明文档,对应参考资料,
通过对基于地棚控制原理的半主动悬架模型的研究,我们可以更好地理解悬架系统的工作原理,并且通过优化控制算法和模型参数,有望提升汽车行驶的平顺性和安全性。感兴趣的小伙伴们不妨自己动手试试这个模型,说不定能有新的发现呢!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 7
7 0
0- 0



 已为社区贡献23条内容
已为社区贡献23条内容

所有评论(0)