三相五电平MMC的IGBT故障诊断及定位仿真探索
三相五电平MMC的IGBT故障诊断及定位仿真 基于桥臂电流和子模块电容电压的状态观测器故障诊断模型,能够迅速定位单管故障 1.子模块个数N=4,五电平MMC,直流侧电压Udc=700V,交流侧电压380V 2.锁相环:采用基于DSOGI正负序分离的锁相环,能够快速、准确的锁相 2.控制器采用双闭环控制,外环控制有功功率,采用PI调节器,电流内环采用PI调节器 3.环流抑制采用PIR控制,能够抑制环流二倍频分量; 4.调制方式:载波层叠PWM调制方式(PD-PWP) 5.均压排序:排序算法,判断桥臂电流方向确定投入切除; 仿真结果:1.输出功率能够稳定在2kW和10kW之间,无功稳定在0Var; 2.网侧电压电流波形均为对称的三相电压和三相电流波形,并网电流THD=2.74%<3%,满足并网要求; 3.环流抑制后桥臂电流得到明显改善,桥臂电流中二倍频谐波含量明显得到抑制; 4.电容电压均压效果完美。 波形质量好,可 matlab版本为2022b 可转以下版本 联系即可邮件发送
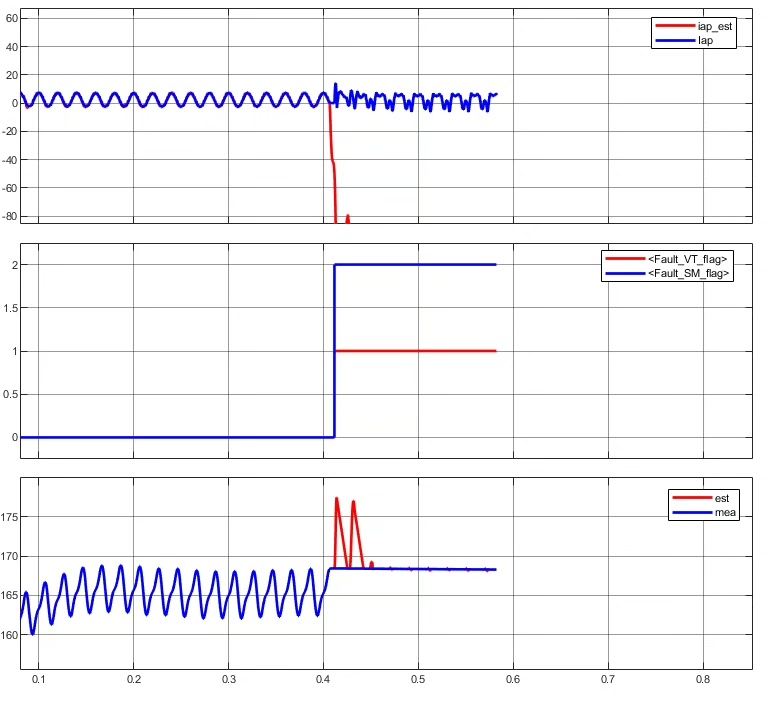
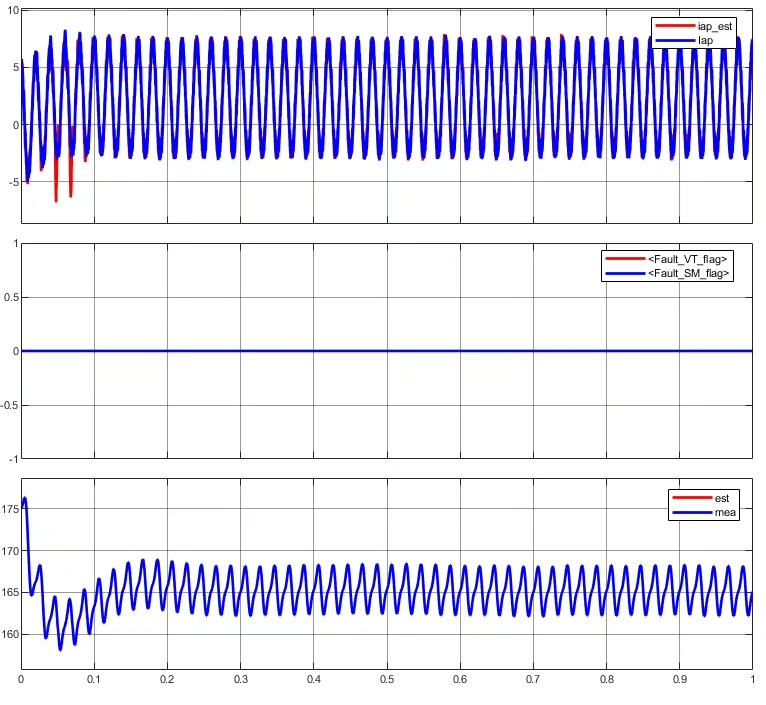
在电力电子领域,三相五电平模块化多电平换流器(MMC)的IGBT故障诊断及定位是个关键课题。今天咱就来唠唠基于桥臂电流和子模块电容电压的状态观测器故障诊断模型,它可是能迅速定位单管故障的利器。
一、模型参数设定
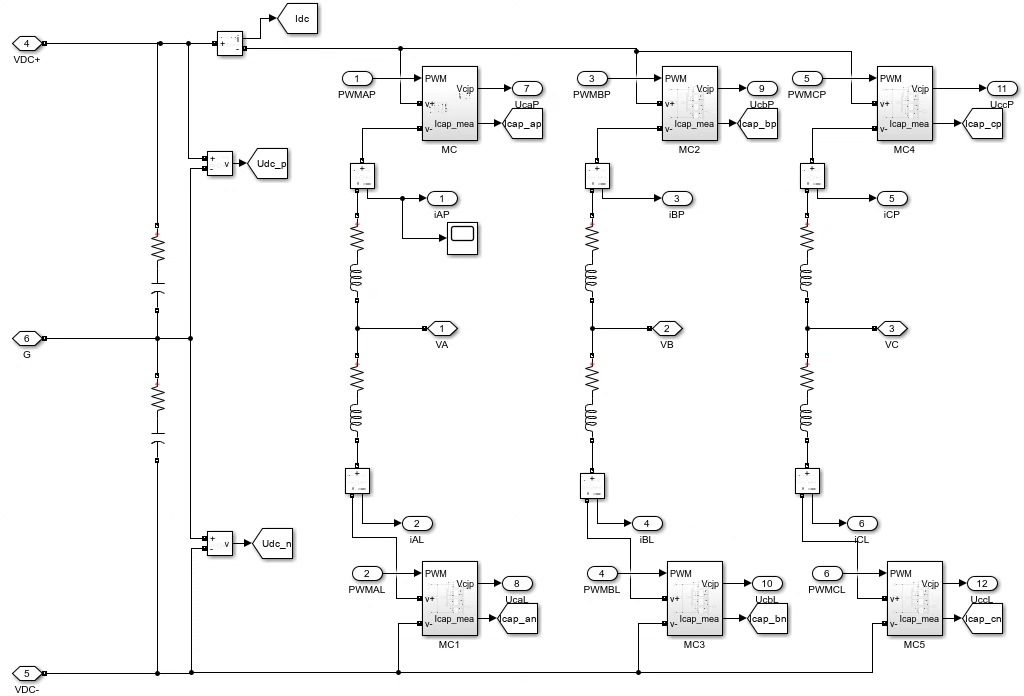
咱这个模型里,子模块个数N设定为4 ,是五电平的MMC。直流侧电压Udc给到700V ,交流侧电压则是380V。这些参数的设定对整个系统的性能表现有着基础而关键的作用。
二、关键技术实现
(一)锁相环
采用基于DSOGI正负序分离的锁相环,这可是能快速、准确锁相的好东西。在Matlab里,实现这个锁相环功能的代码大概像这样(以下代码仅为示意,实际需依具体情况调整):
% 假设已经获取到三相电压信号Va、Vb、Vc
omega = 2*pi*50; % 电网角频率,假设50Hz
dt = 0.00001; % 采样时间间隔
time = 0:dt:1; % 时间向量
% DSOGI相关参数
k = 0.1; % 滤波器系数
alpha = 2*k*omega;
beta = omega^2;
% 初始化变量
Vad = 0; Vad_1 = 0; Vad_2 = 0;
Vaq = 0; Vaq_1 = 0; Vaq_2 = 0;
for n = 1:length(time)
% 正序分量提取
Vad = alpha*(Va(n) - Vad_1) + 2*cos(omega*time(n))*Vad_1 - Vad_2;
Vaq = alpha*Vaq_1 + 2*cos(omega*time(n))*Vaq_1 - Vaq_2 + beta*(Va(n) - Vad_1);
% 更新变量
Vad_2 = Vad_1; Vad_1 = Vad;
Vaq_2 = Vaq_1; Vaq_1 = Vaq;
end
% 通过Vad和Vaq等变量进一步计算相位等信息这段代码就是基于DSOGI算法,逐步从三相电压信号里分离出正负序分量,进而实现快速准确的锁相。
(二)控制器
控制器采用双闭环控制,外环控制有功功率,用的是PI调节器。电流内环同样采用PI调节器。以Matlab实现外环PI调节器为例(简化示意):
% 初始化PI参数
kp_p = 0.1;
ki_p = 0.01;
p_error_1 = 0;
p_i = 0;
% 假设已经获取到有功功率实际值p_real和参考值p_ref
for n = 1:length(time)
p_error = p_ref - p_real(n);
p_i = p_i + p_error*dt;
p_output = kp_p*p_error + ki_p*p_i;
% p_output用于后续控制环节
p_error_1 = p_error;
end外环PI调节器通过不断计算有功功率的误差,并积分和比例调节,输出控制量给后续环节,以此稳定有功功率。电流内环PI调节器原理类似,只是针对电流信号进行调节。
(三)环流抑制
环流抑制采用PIR控制,这个能抑制环流二倍频分量。实现代码大概如下(示意):
% 初始化PIR参数
kp_c = 0.05;
ki_c = 0.005;
kr_c = 0.001;
c_error_1 = 0;
c_i = 0;
% 假设已经获取到环流实际值i_cir和参考值i_cir_ref(通常为0)
for n = 1:length(time)
c_error = i_cir_ref - i_cir(n);
c_i = c_i + c_error*dt;
c_output = kp_c*c_error + ki_c*c_i + kr_c*sin(2*omega*time(n))*c_error;
% c_output用于环流抑制控制
c_error_1 = c_error;
end这里通过PIR控制算法,利用比例、积分以及与二倍频相关的谐振控制项,来抑制环流的二倍频分量。
(四)调制方式
调制方式采用载波层叠PWM调制方式(PD - PWP) 。在Matlab里实现时,大概思路是生成多个载波信号,与调制信号进行比较来生成PWM波。例如:
% 假设已经获取到调制信号m_signal
N_carrier = 4; % 载波个数,对应子模块个数
carrier_freq = 1000; % 载波频率
carrier_amp = 1;
t = 0:dt:0.02;
carriers = zeros(N_carrier,length(t));
for i = 1:N_carrier
carriers(i,:) = carrier_amp*sin(2*pi*carrier_freq*t + (i - 1)*pi/N_carrier);
end
pwm_signal = zeros(size(t));
for n = 1:length(t)
for i = 1:N_carrier
if m_signal(n) > carriers(i,n)
pwm_signal(n) = pwm_signal(n) + 1;
end
end
end这段代码生成了4个相位依次相差一定角度的载波信号,与调制信号比较后生成PWM信号,这就是PD - PWP调制方式的简单实现。
(五)均压排序
均压排序采用排序算法,通过判断桥臂电流方向确定投入切除。虽然代码实现较为复杂,但思路就是在每个采样时刻,根据桥臂电流方向,对各个子模块电容电压进行排序,决定哪些子模块该投入工作,哪些该切除,以实现电容电压均压。
三、仿真结果
- 功率输出:输出功率能够稳定在2kW和10kW之间,无功稳定在0Var 。这说明系统在功率控制方面表现良好,能按预期维持功率输出的稳定。
- 网侧波形:网侧电压电流波形均为对称的三相电压和三相电流波形,并网电流THD = 2.74% < 3% ,满足并网要求。这得益于前面提到的各种控制策略,保证了电能质量。
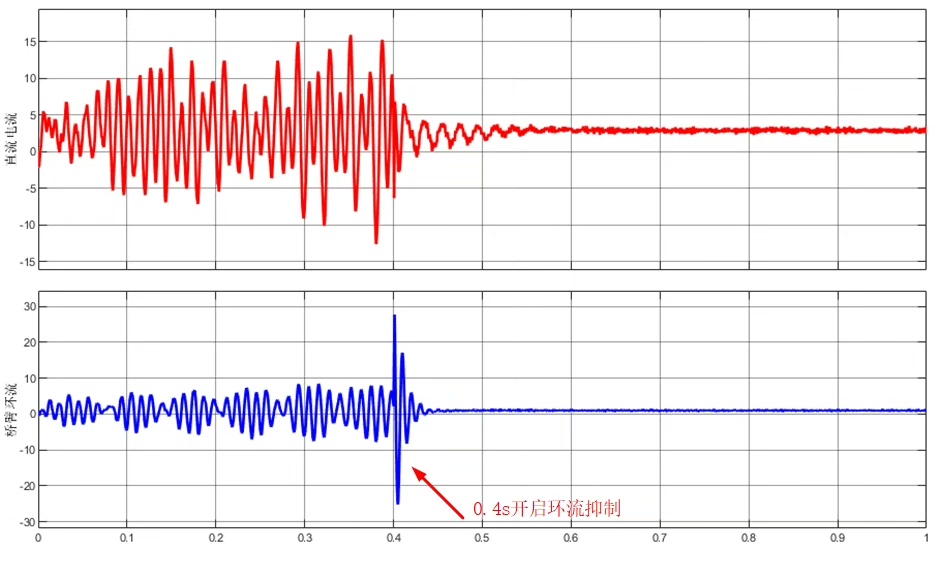
- 环流抑制:环流抑制后桥臂电流得到明显改善,桥臂电流中二倍频谐波含量明显得到抑制。从实际波形对比就能很直观地看到PIR控制的效果。
- 电容电压均压:电容电压均压效果完美,波形质量好。这就是均压排序算法起了大作用,让各个子模块电容电压保持平衡。
本次仿真基于Matlab 2022b版本,要是需要转其他版本,联系我邮件发送就行。整个三相五电平MMC的IGBT故障诊断及定位仿真涉及不少复杂但有趣的技术,希望这篇博文能给大家一些启发。
三相五电平MMC的IGBT故障诊断及定位仿真 基于桥臂电流和子模块电容电压的状态观测器故障诊断模型,能够迅速定位单管故障 1.子模块个数N=4,五电平MMC,直流侧电压Udc=700V,交流侧电压380V 2.锁相环:采用基于DSOGI正负序分离的锁相环,能够快速、准确的锁相 2.控制器采用双闭环控制,外环控制有功功率,采用PI调节器,电流内环采用PI调节器 3.环流抑制采用PIR控制,能够抑制环流二倍频分量; 4.调制方式:载波层叠PWM调制方式(PD-PWP) 5.均压排序:排序算法,判断桥臂电流方向确定投入切除; 仿真结果:1.输出功率能够稳定在2kW和10kW之间,无功稳定在0Var; 2.网侧电压电流波形均为对称的三相电压和三相电流波形,并网电流THD=2.74%<3%,满足并网要求; 3.环流抑制后桥臂电流得到明显改善,桥臂电流中二倍频谐波含量明显得到抑制; 4.电容电压均压效果完美。 波形质量好,可 matlab版本为2022b 可转以下版本 联系即可邮件发送

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献35条内容
已为社区贡献35条内容

所有评论(0)