分布式驱动电动汽车路面附着系数估计:UKF 与 CKF 的较量
基于分布式驱动电动汽车路面附着系数估计, 通过两种方式对电动汽车四个车轮的路面附着系数进行估计,分别是: 无迹卡尔曼滤波(UKF)和容积卡尔曼滤波(CKF) 在高速,低速下,对开路面,对接路面四种组合工况对路面附着系数进行准确估计估计。 该模型的两种估计算法均由S-function编写,可比较二种滤波的估计效果56
在电动汽车的发展进程中,准确估计路面附着系数对于车辆的安全与性能至关重要。今天咱们就来聊聊基于分布式驱动电动汽车路面附着系数估计,主要通过无迹卡尔曼滤波(UKF)和容积卡尔曼滤波(CKF)这两种方式,对电动汽车四个车轮的路面附着系数进行估计。
一、估计工况设定
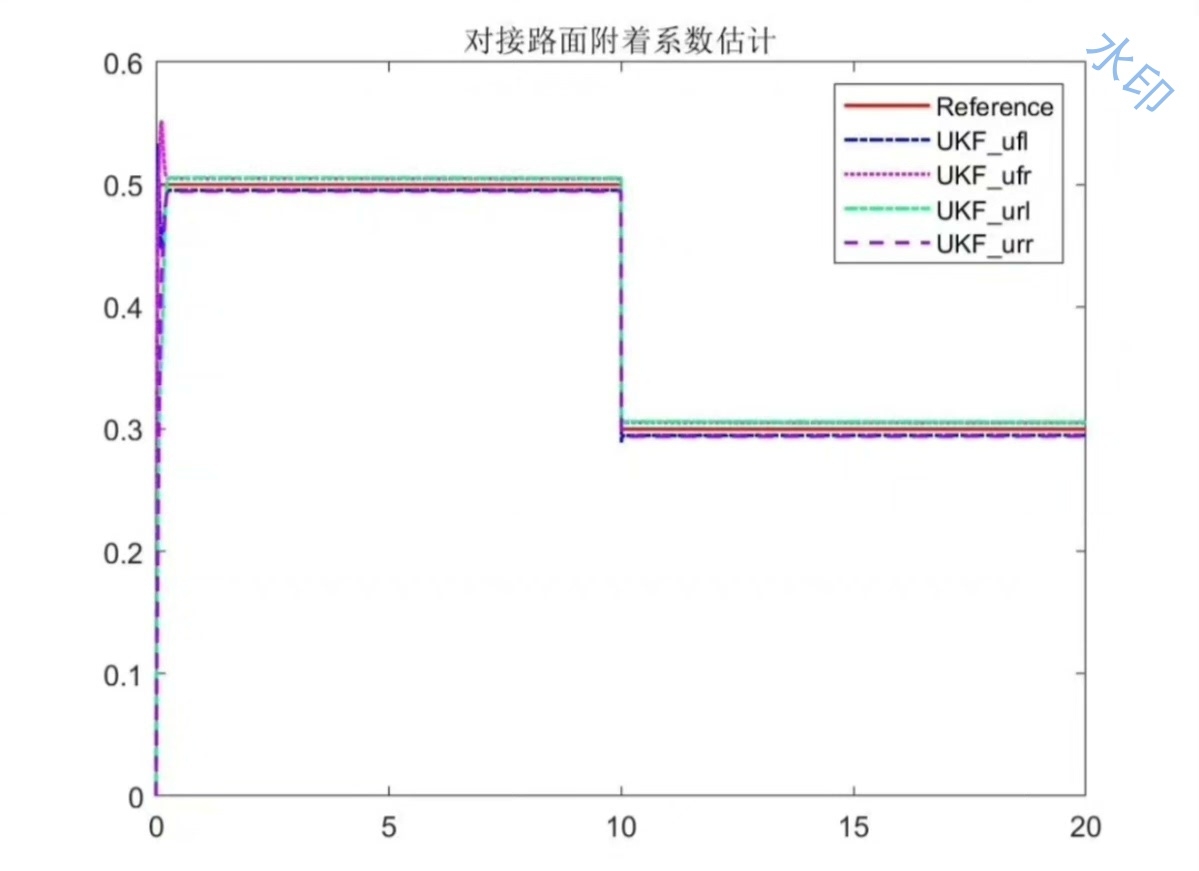
为了全面评估算法性能,我们设定了高速、低速,对开路面、对接路面这四种组合工况。不同的工况模拟了现实中车辆行驶时可能遇到的多样路况,在这些工况下对路面附着系数进行准确估计,是我们研究的核心目标。
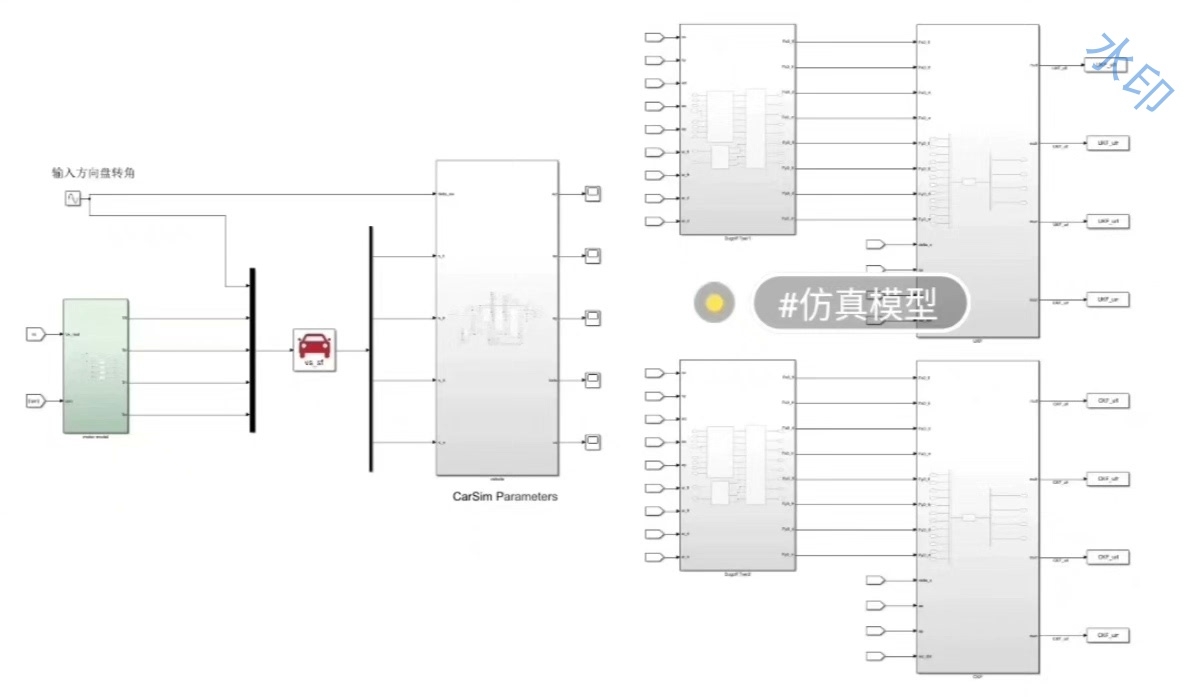
二、算法实现:S - function 编写
这里的两种估计算法,也就是 UKF 和 CKF,均由 S - function 编写。S - function 是一种强大的工具,它允许我们在 MATLAB/Simulink 环境中自定义动态系统。

比如说,以 UKF 的 S - function 实现为例(这里为简化示意代码,仅展现关键结构):
function [sys,x0,str,ts] = untitled(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
case 1,
sys=mdlDerivatives(t,x,u);
case 2,
sys=mdlUpdate(t,x,u);
case 3,
sys=mdlOutputs(t,x,u);
case 4,
sys=mdlGetTimeOfNextVarHit(t,x,u);
case 9,
sys=mdlTerminate(t,x,u);
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 1; % 这里假设输出为路面附着系数估计值
sizes.NumInputs = 1; % 输入可以是与车辆状态相关的数据,如车速等
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [];
str = [];
ts = [0 0];
function sys=mdlDerivatives(t,x,u)
sys = [];
function sys=mdlUpdate(t,x,u)
% UKF 核心更新步骤
% 这里涉及到 sigma 点计算、预测和更新协方差等操作
% 简化示意,实际会复杂很多
sys = x + u;
function sys=mdlOutputs(t,x,u)
sys = x; % 输出估计的路面附着系数
function sys=mdlGetTimeOfNextVarHit(t,x,u)
sampleTime = 0.1; % 采样时间
sys = t + sampleTime;
function sys=mdlTerminate(t,x,u)
sys = [];在这段代码里,mdlInitializeSizes 函数设置了模型的基本参数,包括状态变量数量、输入输出数量等。mdlUpdate 函数则是 UKF 算法核心更新步骤的体现之处,虽然这里代码简化了,但实际中会涉及到复杂的 sigma 点计算、预测和更新协方差等操作,以此来不断优化路面附着系数的估计值。
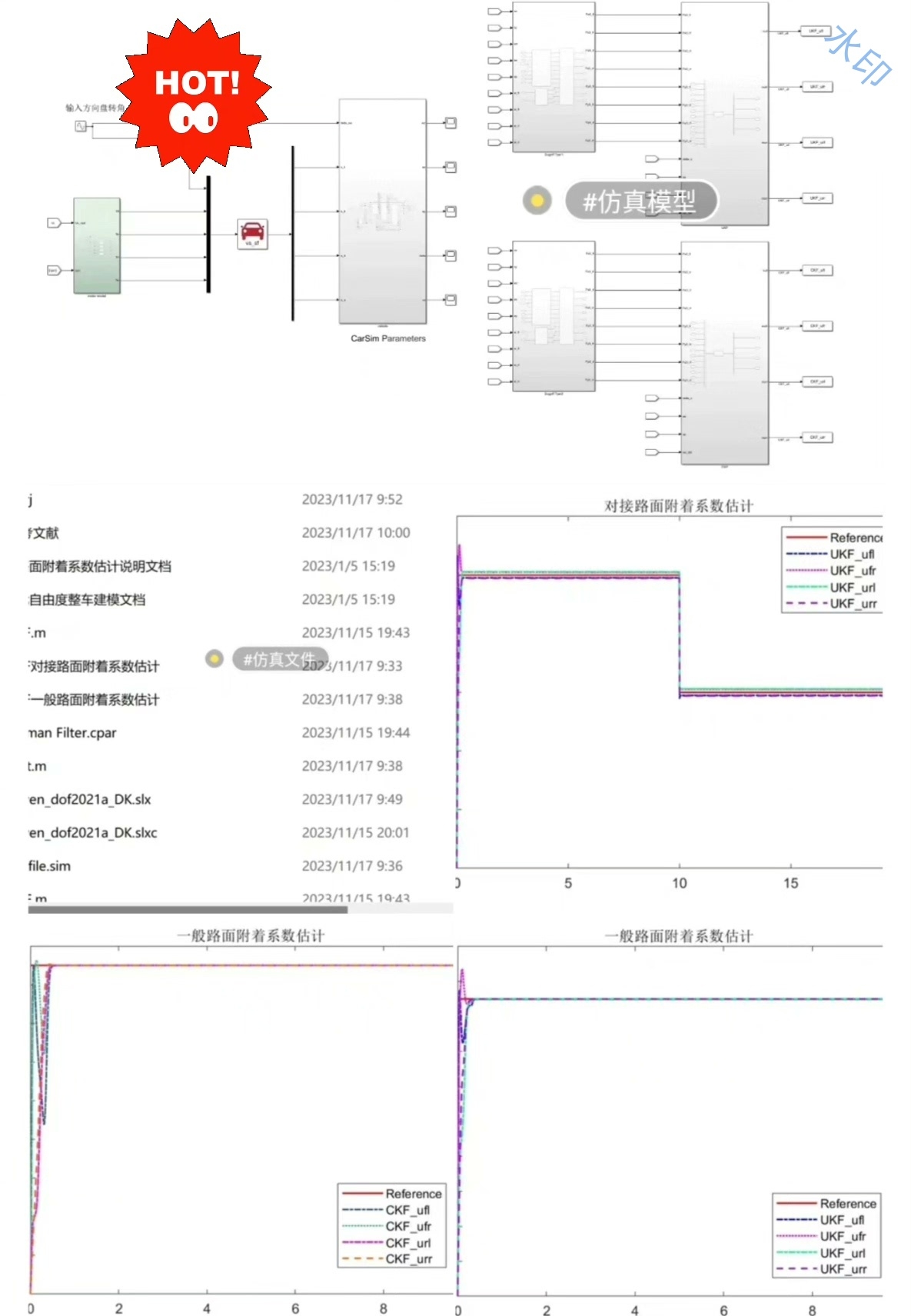
三、两种滤波估计效果比较
无迹卡尔曼滤波(UKF)和容积卡尔曼滤波(CKF)虽然都用于估计路面附着系数,但它们有着不同的特性。
基于分布式驱动电动汽车路面附着系数估计, 通过两种方式对电动汽车四个车轮的路面附着系数进行估计,分别是: 无迹卡尔曼滤波(UKF)和容积卡尔曼滤波(CKF) 在高速,低速下,对开路面,对接路面四种组合工况对路面附着系数进行准确估计估计。 该模型的两种估计算法均由S-function编写,可比较二种滤波的估计效果56
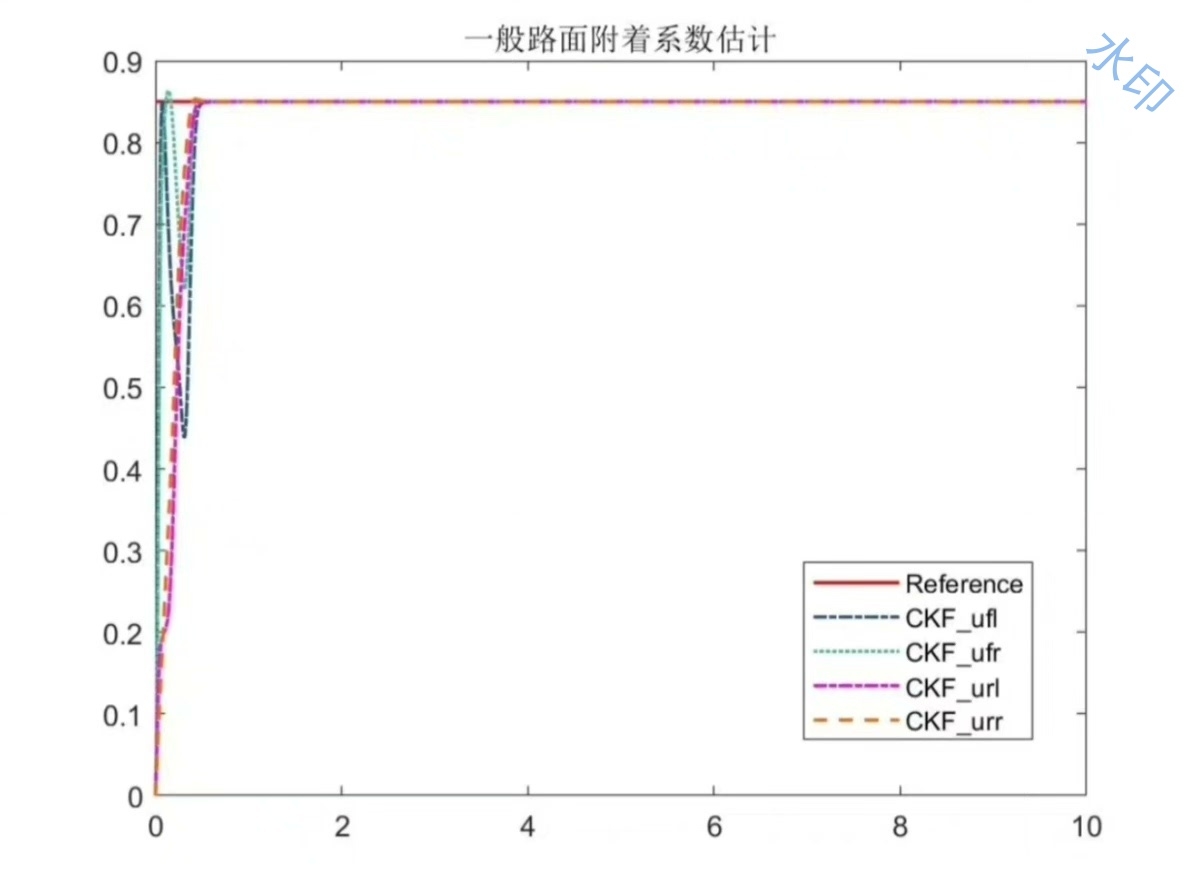
UKF 通过确定性采样策略来近似概率分布,它能够较好地处理非线性系统,在一些复杂工况下表现出色。而 CKF 则基于球 - 径向容积准则来选择采样点,在计算效率和数值稳定性上有独特优势。
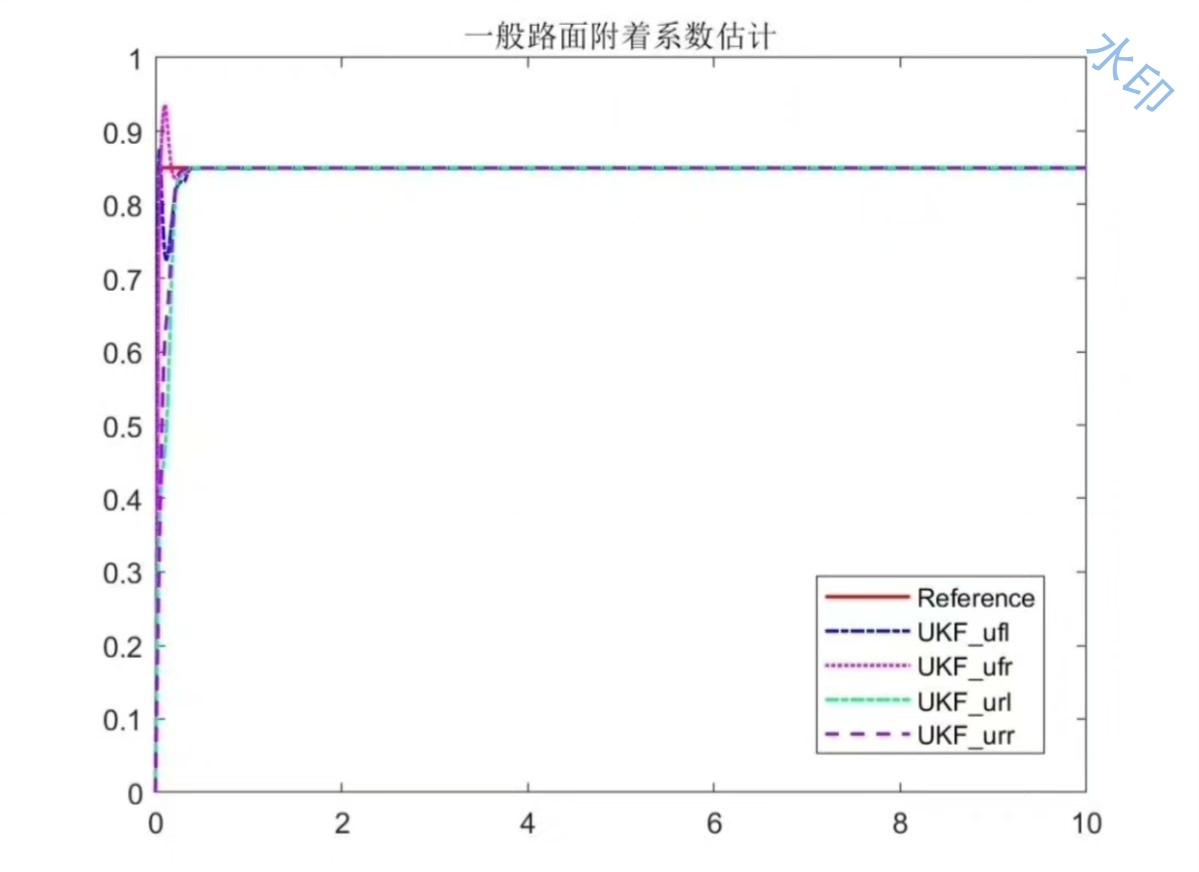
在实际的模拟和测试中,通过对比不同工况下两种算法估计出的路面附着系数与真实值的偏差,我们就能直观地看到它们的效果差异。比如在高速对开路面工况下,UKF 可能由于其对非线性系统的适应性,能更快地追踪路面附着系数的变化,但 CKF 凭借其数值稳定性,估计结果的波动相对较小。
通过这种基于 S - function 实现的 UKF 和 CKF 算法,在不同工况下对分布式驱动电动汽车路面附着系数进行估计和比较,为我们优化车辆控制策略,提升行车安全与性能提供了有力的支持。后续还可以进一步探索如何融合两种算法的优势,以实现更精准的路面附着系数估计。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 3
3 0
0- 0



 已为社区贡献29条内容
已为社区贡献29条内容

所有评论(0)