在线教程丨低门槛部署英伟达最新Physical AI模型,覆盖人形机器人/人体运动生成/扩散模型微调等
在刚刚结束的 GTC 2026 上,除了万众瞩目的 GPU 新品外,NVIDIA 还将不少笔墨放在了一个更具体、更落地的方向上:Physical AI。
这个黄仁勋反复提及的概念,昭示着一个关键结论:当 AI 不再只存在于屏幕之中,而是能够感知物理环境、理解任务并执行动作时,它才真正成为推动产业变革的基础设施。这一概念与「具身智能(Embodied AI)」高度重合,强调 AI 与真实世界的深度耦合——不仅是「会动」,更是在复杂环境中可靠地行动。
所以,我们能够看到,在 GTC 2026 这个技术风向标大会上,从人形机器人基础模型,到高保真动作生成,再到统一的人体建模体系,NVIDIA 发布的一系列模型不再只是停留在模型能力本身,而是围绕「动作」和「执行」展开。
其中,NVIDIA Isaac GR00T、Kimodo 和 SOMA-X 三个开源项目,分别从决策、生成与表示三个层面,切入同一个问题——如何让机器更自然、更高效地完成复杂动作。
一个负责理解任务并转化为可执行行为,一个专注生成细腻、真实的运动轨迹,另一个则试图解决长期存在的人体模型割裂问题,让不同系统之间能够更顺畅地协同。这些能力单看各自都有明确价值,但更重要的是,它们共同指向了一个更实际的目标:让机器人从「能动」走向「好用」。
除此之外,英伟达还发布了 FDFO 这一面向扩散模型的训练方法,从生成模型优化的角度,为上述能力提供底层支撑。
为了让全球开发者能够以更低门槛、更稳定的环境快速体验 GTC 2026 的开源成果,HyperAI 官网(hyper.ai)的教程版块上线了以下在线教程:
NVIDIA Isaac GR00T:通用人形机器人基础模型
在线运行:https://go.hyper.ai/2Cjvr
SOMA-X:统一参数化人体模型框架
在线运行:https://go.hyper.ai/UcEI7
Kimodo:人体与机器人运动生成模型
在线运行:https://go.hyper.ai/p99vI
FDFO:有限差分流优化
在线运行:https://go.hyper.ai/ikihN
HyperAI 为新用户准备了注册福利,仅需 $1,即可获得 20 小时 RTX 5090 算力(原价 $7),资源永久有效。
NVIDIA Isaac GR00T
通用人形机器人基础模型
NVIDIA Isaac GR00T N1.6 是一款于 2026 年 3 月发布的开源视觉-语言-动作(Vision-Language-Action, VLA)模型,专为通用人形机器人的技能学习而设计。该模型采用跨形态(cross-embodiment)设计,能够接收包括语言和图像在内的多模态输入,并在多样化环境中执行操作任务。
GR00T N1.6 的神经网络架构结合了视觉语言基础模型与用于连续动作去噪的 Diffusion Transformer(扩散变换器)头部。该模型基于多样化的机器人数据进行训练,包括双臂机器人、半人形机器人以及大规模人形机器人,并可通过后训练适配不同的机器人形态、任务和环境。
在线运行:https://go.hyper.ai/2Cjvr

教程示例
SOMA-X:统一参数化人体模型框架
参数化人体模型(Parametric Human Body Models),包括 Skinned Multi-Person Linear(SMPL)、SMPL-X、多任务人体表示(MHR)、Anny 以及 GarmentMeasurements,被广泛应用于人体重建、动画和仿真等领域。
然而,这些模型在底层存在根本性的不兼容问题:每个模型都定义了各自的网格拓扑、关节层级结构和参数化方式,导致它们之间无法无缝集成。因此,当需要结合不同模型的优势(例如,将某一模型的年龄控制能力与另一模型的动作数据结合)时,往往必须为每一对模型单独开发适配器,这不仅增加了开发成本,也严重限制了系统的互操作性和实际应用。
在此背景下,NVIDIA Labs 发布的 SOMA-X 旨在解决参数化人体模型之间的兼容性问题。其提供了一种标准化的人体拓扑与骨骼绑定系统,作为所有受支持参数化人体模型的通用中枢。它并不是替代现有模型,而是通过将各模型的静态形状映射到一个共享表示中,实现统一。这种方式使得任意受支持的身份模型都可以在统一的动画管线中驱动,无需定制适配器或针对特定模型进行重定向处理,从而大幅提升了系统的通用性与扩展能力。
在线运行:https://go.hyper.ai/UcEI7
Kimodo:人体与机器人运动生成模型
Kimodo 是由 NVIDIA Research于 2026 年 3 月发布的一种运动学驱动的动作扩散模型(kinematic motion diffusion model)。该模型基于一个大规模(700 小时)、可商用的光学动作捕捉数据集进行训练,能够生成高质量的人类及类人机器人动作,并可通过文本提示以及丰富的运动学约束(如全身姿态关键帧、末端执行器的位置/旋转、二维路径和二维航点)进行控制。
Kimodo 支持多种骨骼类型,包括:
* SOMA:人体骨骼,30 个关节
* Unitree G1:类人机器人骨骼,34 个关节
* SMPL-X:人体参数化模型,22 个关节
该模型采用扩散架构,结合文本编码器与运动约束机制,能够根据自然语言描述和关键帧约束生成平滑且自然的动作序列。
在线运行:https://go.hyper.ai/p99vI
FDFO:有限差分流优化
FDFO(Finite Difference Flow Optimization,有限差分流优化)是由 NVIDIA 于 2026 年 3 月发布的一种流式扩散模型微调方法,基于有限差分梯度估计。该方法通过在 Stable Diffusion 3.5 Medium 上进行强化学习后训练,利用来自视觉语言模型(VLM)评分和/或 PickScore 的奖励信号,来优化模型的生成质量。
FDFO 解决了传统扩散模型微调中的梯度估计难题,通过有限差分方法实现高效且稳定的梯度计算。在保持模型原有能力的同时,该方法显著提升了生成图像与文本提示之间的对齐程度、美学质量以及真实感。
在线运行:https://go.hyper.ai/ikihN
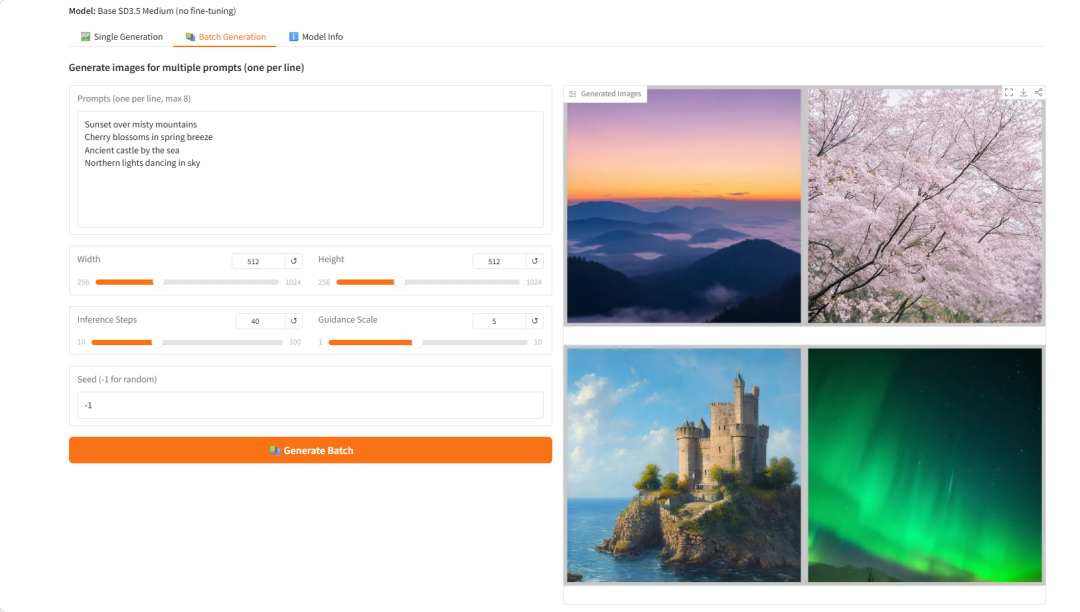
教程示例

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 1
1 0
0- 0



 已为社区贡献9条内容
已为社区贡献9条内容

所有评论(0)