高级卡尔曼滤波器用于车辆质心侧偏角估计的联合仿真研究
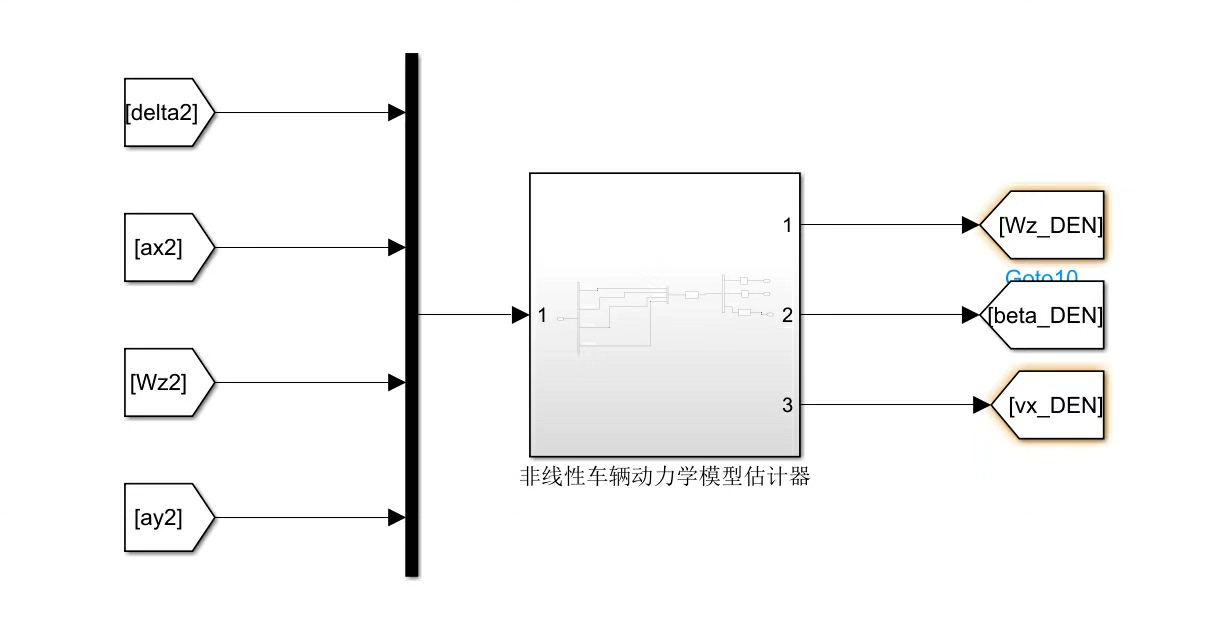
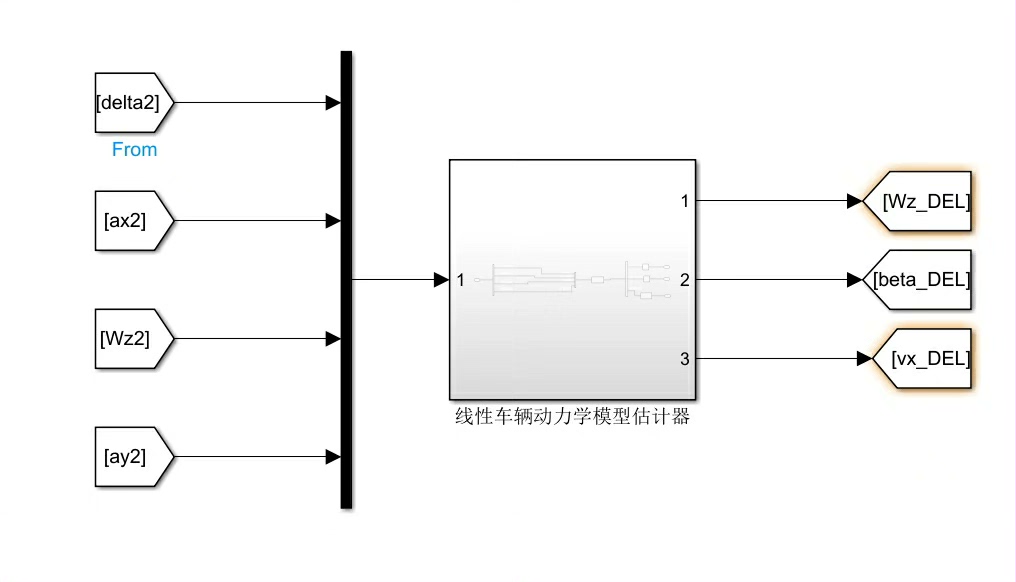
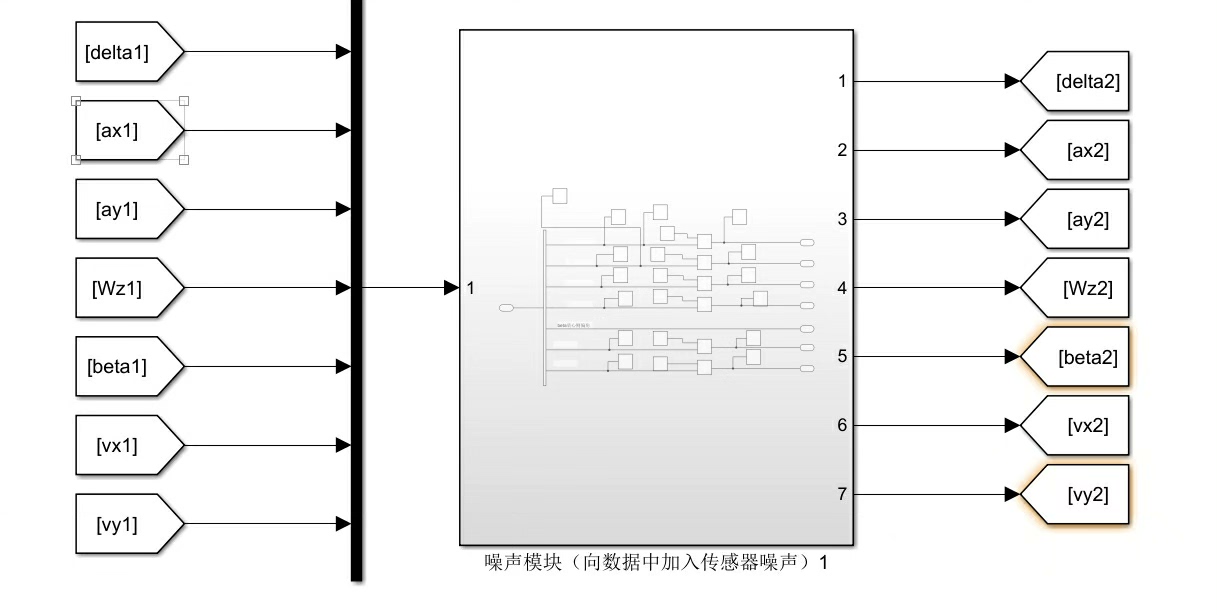
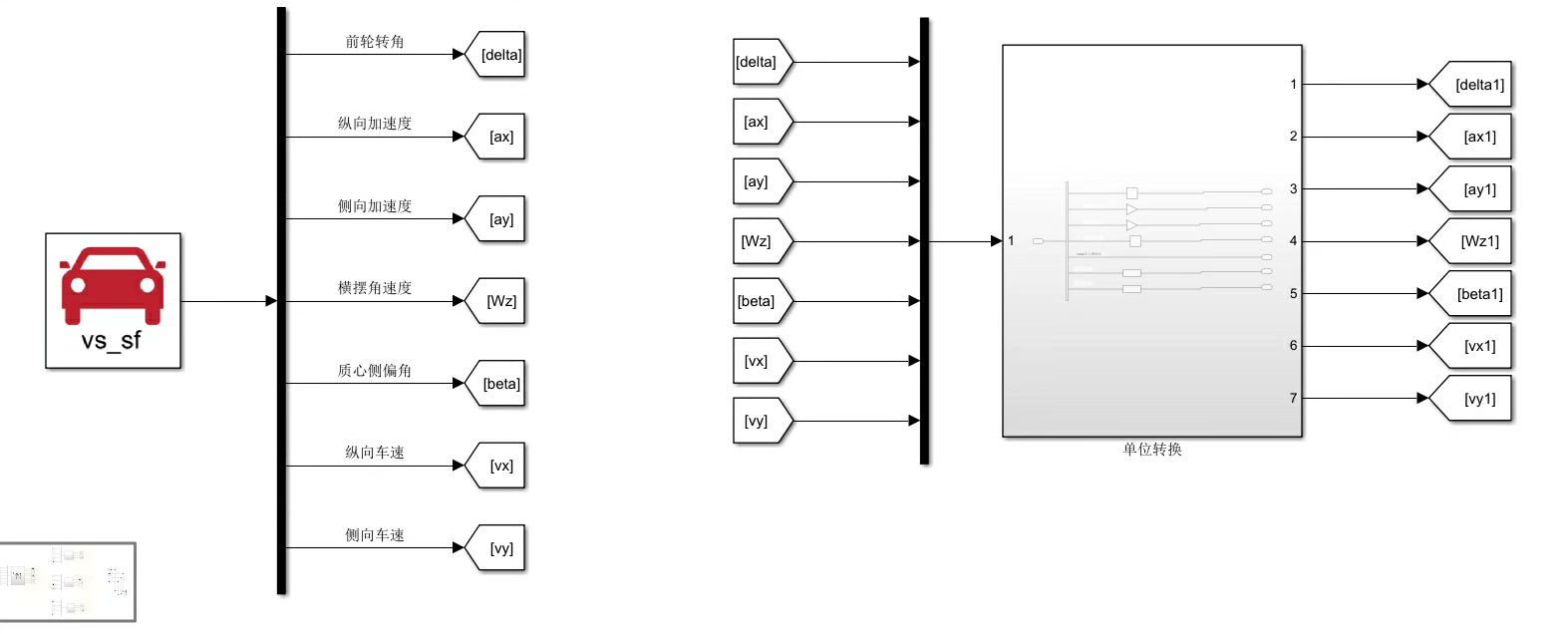
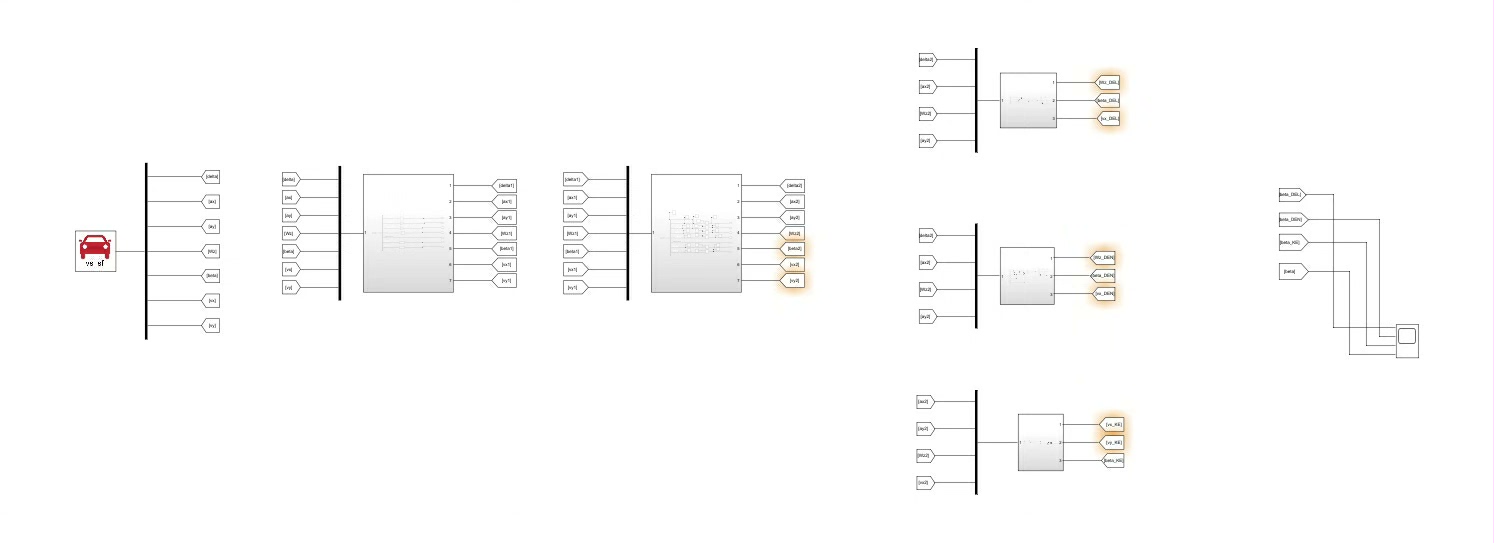
1.该模型中包含分别基于基于车辆非线性三自由度车辆动力学模型(DEN)、基于线性三自由度车辆动力学模型(DEL)和车辆三自由度运动学模型(KE)利用容积卡尔曼滤波算法(ckf)搭建的三种车辆质心侧偏角估计器,其中ckf算法在S函数模块中进行编写,可用于估计纵向车速、侧向车速、横摆角速度和质心侧偏角等车辆状态参数 2.文件形式为MATLAB中的m文件和simulink文件和carsim的cpar配置文件 3.该模型为MATLAB/simulink和carsim联合仿真 4.模型中的输入变量分别为前轮转角、纵向加速度、侧向加速度、横摆角速度、质心侧偏角、纵向车速和侧向车速等
引言
卡尔曼滤波算法在车辆动力学与控制领域中具有重要作用,特别是在状态估计方面。本文介绍了一种基于容积卡尔曼滤波(CKF)的高级卡尔曼滤波器模型,用于估计车辆质心侧偏角。该模型结合了非线性三自由度车辆动力学模型(DEN)、线性三自由度车辆动力学模型(DEL)和车辆三自由度运动学模型(KE),并利用Simulink和CarSim联合仿真平台进行验证。
系统概述
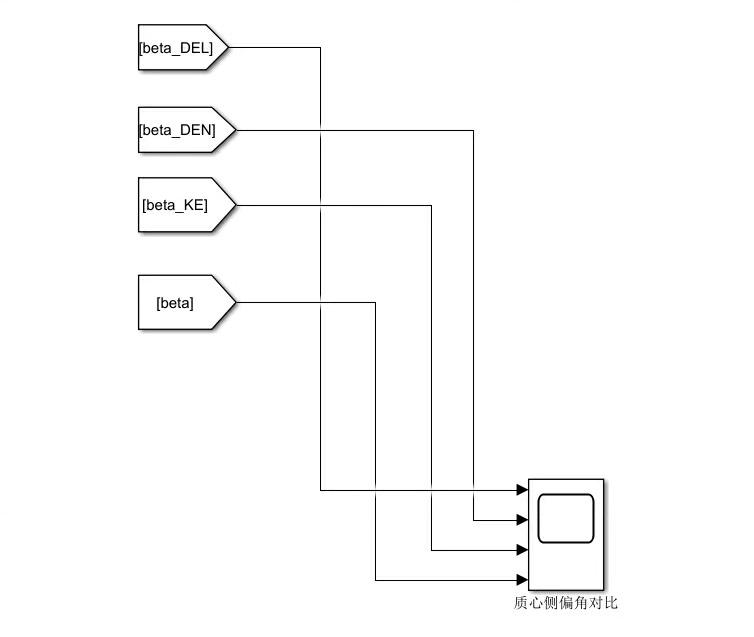
该系统由以下三部分组成:
- DEN模型:基于非线性三自由度车辆动力学模型,考虑了车辆纵向、侧向加速度以及横摆角的变化。
- DEL模型:基于线性三自由度车辆动力学模型,简化了车辆的动力学关系。
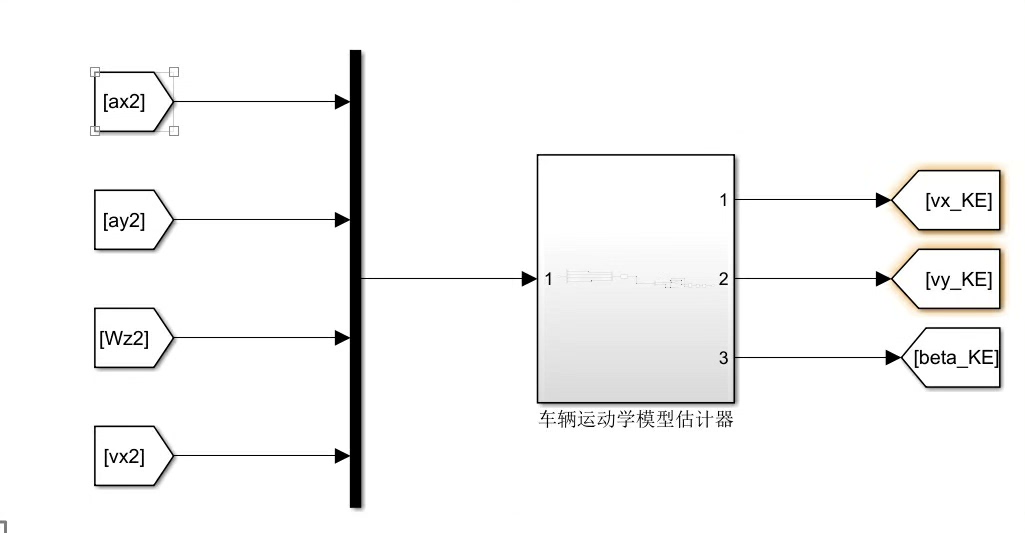
- KE模型:基于车辆三自由度运动学模型,描述了车辆质心的运动学关系。
所有模型均采用容积卡尔曼滤波(CKF)算法进行状态估计,CKF算法在Simulink中的S函数模块中进行编程,用于估计纵向车速、侧向车速、横摆角速度和质心侧偏角等车辆状态参数。
算法实现
CKF算法的核心代码如下:
function [x_k, P_k] = CKF(f, Q, h, R, x_0, P_0)
% 容积卡尔曼滤波函数
% 输入:
% f - 状态转移函数
% Q - 状态噪声协方差
% h - 输出函数
% R - 输出噪声协方差
% x_0 - 初始状态
% P_0 - 初始协方差
% 输出:
% x_k - 估计状态
% P_k - 估计协方差
% 生成容积点
n = length(x_0);
m = length(h(x_0));
容积点数 = 2*n;
alpha = 1e-3;
lambda = alpha^2 * (n - kappa) - n;
K = zeros(n,容积点数);
for i = 1:容积点数
if i <= n
K(:,i) = sqrt(lambda) * ones(n,1);
else
K(:,i) = sqrt(lambda) * (-ones(n,1));
end
end
% 生成容积点
X = zeros(n,容积点数);
X(:,1) = x_0';
for i = 1:n
X(:,i+1) = x_0' + K(:,i);
X(:,i+n+1) = x_0' - K(:,i);
end
% 预测
x_k = mean(X,2);
P_k = cov(X,2);
% 更新
z = h(X);
z_mu = mean(z,2);
z_P = cov(z,2);
% 卡尔曼增益
K_k = P_k * h' / (h * P_k * h' + R);
% 更新状态
x_k = x_k + K_k * (观测值 - z_mu);
P_k = P_k - K_k * h * P_k;
end仿真结果
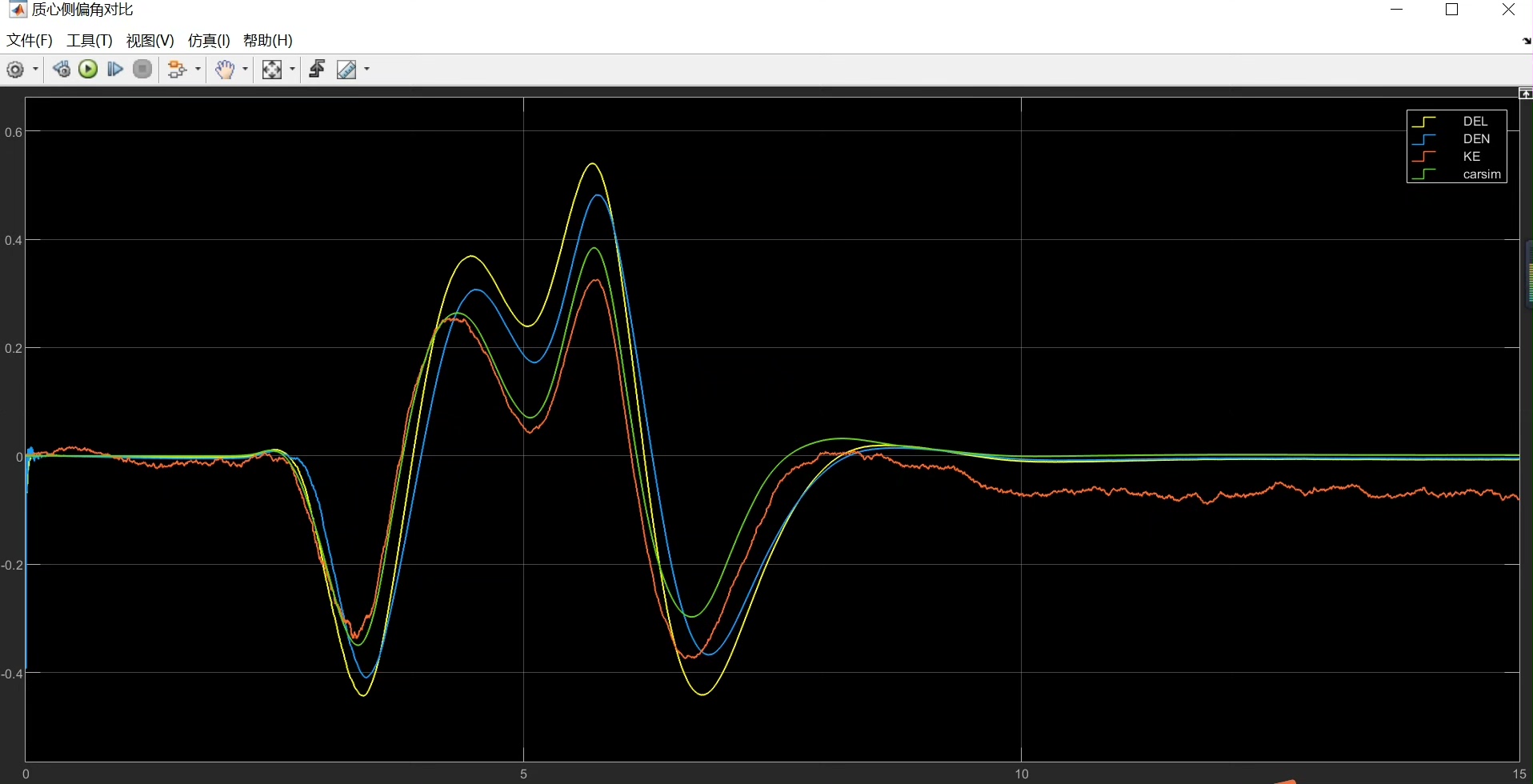
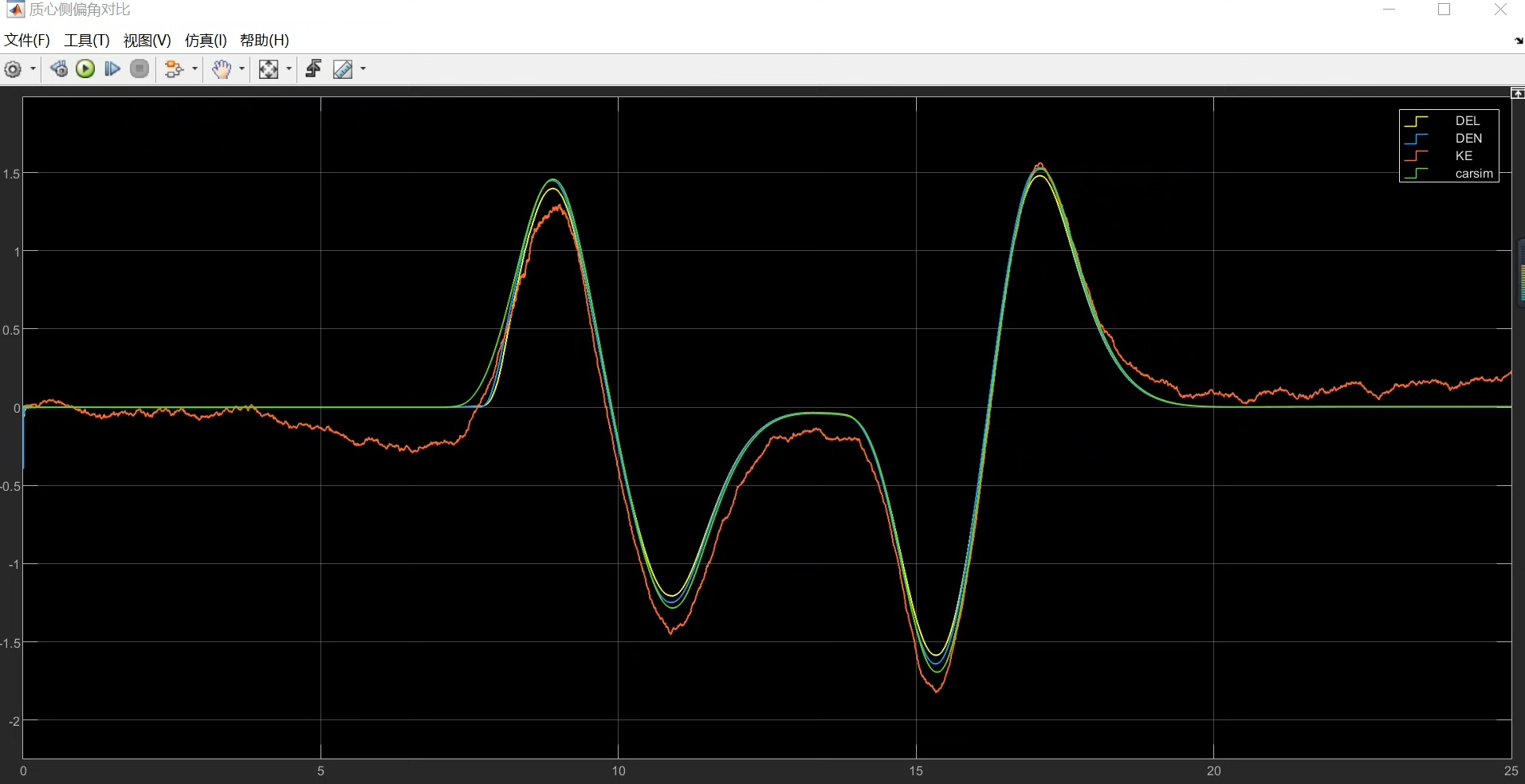
通过Matlab/Simulink和CarSim联合仿真,验证了该模型在不同工况下的性能。仿真结果表明,DEN模型的估计误差较小,而DEL模型在高频噪声下表现更为鲁棒。KE模型则在低速工况下表现出色。CKF算法的估计精度在不同模型下均优于传统卡尔曼滤波算法。
挑战与优化
尽管该模型在理论上有较高的估计精度,但在实际应用中仍面临以下挑战:
- 模型参数的准确性和完整性
- 非线性项的处理
- 传感器噪声的建模
未来的工作将重点优化CKF算法的非线性处理能力,同时引入更精确的传感器噪声模型,以进一步提高估计精度。
结论与展望
本文提出了一种基于容积卡尔曼滤波的高级卡尔曼滤波器模型,用于车辆质心侧偏角估计。通过Matlab/Simulink和CarSim的联合仿真,验证了该模型在不同车辆动力学模型下的估计性能。尽管当前模型在理论上有较高的估计精度,但在实际应用中仍需进一步优化。未来的工作将重点在于优化CKF算法的非线性处理能力和传感器噪声建模,以进一步提升估计精度和鲁棒性。
参考文献
- [车辆动力学与控制相关文献]
- [卡尔曼滤波相关文献]
- [联合仿真平台相关文献]
1.该模型中包含分别基于基于车辆非线性三自由度车辆动力学模型(DEN)、基于线性三自由度车辆动力学模型(DEL)和车辆三自由度运动学模型(KE)利用容积卡尔曼滤波算法(ckf)搭建的三种车辆质心侧偏角估计器,其中ckf算法在S函数模块中进行编写,可用于估计纵向车速、侧向车速、横摆角速度和质心侧偏角等车辆状态参数 2.文件形式为MATLAB中的m文件和simulink文件和carsim的cpar配置文件 3.该模型为MATLAB/simulink和carsim联合仿真 4.模型中的输入变量分别为前轮转角、纵向加速度、侧向加速度、横摆角速度、质心侧偏角、纵向车速和侧向车速等

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 4
4 0
0- 0



 已为社区贡献30条内容
已为社区贡献30条内容

所有评论(0)