基于 Carsim 与 Matlab/Simulink 实现汽车主动避撞和跟车功能联合仿真
基于模型预测控制(自带的mpc模块)和最优控制理论的Carsim与Matlab/simulink联合仿真实现汽车主动避撞和跟车功能(acc自适应巡航),包含simulink模型(其中有车辆逆纵向动力学模型、逆发动机模型、切换控制逻辑等),Carsim模型
在汽车自动驾驶技术不断发展的今天,实现主动避撞和跟车功能(ACC 自适应巡航)成为了研究的热点。本文将介绍如何基于模型预测控制(自带的 mpc 模块)和最优控制理论,利用 Carsim 与 Matlab/Simulink 进行联合仿真,以达成这两个重要的汽车驾驶辅助功能。
一、整体架构
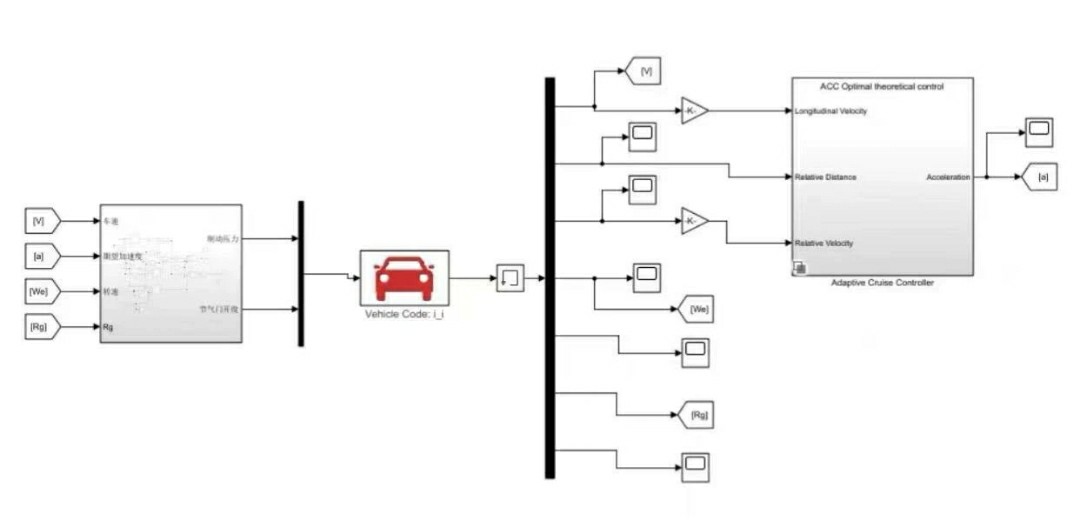
我们的联合仿真系统主要由 Carsim 模型和 Matlab/Simulink 模型两大部分组成。Carsim 擅长精确模拟车辆的动力学特性,而 Matlab/Simulink 则为我们提供了灵活的控制算法设计与实现平台。两者结合,就能实现从车辆物理模型到控制策略的完整闭环仿真。
二、Carsim 模型
Carsim 是一款专业的车辆动力学仿真软件,它可以建立高度逼真的车辆模型。在我们的项目中,通过配置 Carsim 模型的各项参数,如车辆质量、轴距、轮胎特性等,使其能够准确反映实际车辆的动力学响应。例如,我们设置车辆的质量为 1500kg,轴距为 2.7m,这些参数会直接影响车辆在行驶过程中的加速、制动以及转向等行为。
三、Matlab/Simulink 模型
- 车辆逆纵向动力学模型
- 在 Simulink 中搭建车辆逆纵向动力学模型是关键的一步。它的作用是根据期望的车辆运动状态(如速度、加速度),反推需要施加在车辆上的力。以下是一个简化的车辆纵向动力学公式:matlab
% 车辆纵向动力学基本公式
% F = m a
% F: 车辆受到的合力
% m: 车辆质量
% a: 车辆加速度
m = 1500; % 车辆质量 1500kg
adesired = 2; % 期望加速度 2m/s^2
Frequired = m a_desired;
- 这个公式体现了车辆质量、期望加速度与所需驱动力之间的关系。在实际的 Simulink 模型中,我们会将这个公式进一步细化,考虑更多因素,如滚动阻力、空气阻力等。滚动阻力与车辆重量和滚动阻力系数有关,空气阻力则与车速的平方成正比。 - 逆发动机模型
- 逆发动机模型的目的是根据车辆逆纵向动力学模型计算出的所需驱动力,确定发动机需要输出的扭矩。发动机的扭矩输出特性可以用一个近似的函数来表示。例如:matlab
% 简单的发动机扭矩 - 转速关系示例
% 假设扭矩 T 与转速 n 的关系为 T = a n + b
a = -0.05;
b = 300;
nengine = 2000; % 发动机转速 2000rpm
Tengine = a n_engine + b;
- 实际的发动机模型会更加复杂,可能需要考虑发动机的效率、油门开度等因素。在 Simulink 中,我们会将这些因素综合考虑,通过一系列的模块搭建出逆发动机模型,使其能够准确地根据所需驱动力计算出发动机应输出的扭矩。 - 切换控制逻辑
- 切换控制逻辑用于在主动避撞和跟车功能(ACC 自适应巡航)之间进行合理切换。例如,当检测到前方车辆距离过近且有碰撞风险时,系统应迅速切换到主动避撞模式;而当车辆处于正常行驶状态且前方有合适的跟随目标时,系统则工作在 ACC 自适应巡航模式。matlab
% 简单的切换控制逻辑示例
distancetoleadvehicle = 50; % 前方车辆距离 50m
safedistance = 30; % 安全距离 30m
if distancetoleadvehicle <= safedistance
controlmode = 'collisionavoidance';
else
control_mode = 'ACC';
end
- 在 Simulink 中,我们会使用条件判断模块(如 Switch 模块)来实现这种逻辑切换。通过实时监测车辆之间的距离、速度等信息,系统能够动态地在不同控制模式之间进行切换,确保车辆行驶的安全性和舒适性。
四、模型预测控制(MPC)与最优控制理论
- 模型预测控制(MPC)
- MPC 是一种先进的控制策略,它在每个采样时刻基于系统的当前状态预测未来的输出,并通过求解一个优化问题来确定当前时刻的控制输入。在我们的汽车控制场景中,MPC 可以根据车辆当前的速度、位置以及前方车辆的状态,预测未来一段时间内车辆的行驶轨迹,并计算出最优的控制输入(如油门开度、制动压力),以实现主动避撞和跟车功能。
- 在 Simulink 中,我们可以利用自带的 MPC 模块来实现这一控制策略。通过设置预测时域、控制时域等参数,MPC 模块能够根据车辆模型和目标函数进行在线优化计算。例如,预测时域设置为 5s,控制时域设置为 2s,这意味着 MPC 会预测未来 5s 内车辆的状态,并在接下来的 2s 内给出最优的控制输入序列。 - 最优控制理论
- 最优控制理论为我们提供了一种寻找使系统性能指标达到最优的控制策略的方法。在汽车主动避撞和跟车功能中,我们可以定义性能指标,如最小化车辆与前方障碍物的碰撞风险、最小化跟车过程中的速度波动等。通过求解相应的最优控制问题,得到最优的控制律。
- 以最小化跟车过程中的速度波动为例,我们可以定义性能指标为:matlab
% 定义跟车速度波动最小化的性能指标
% J = sum((v - vlead)^2)
% v: 本车速度
% vlead: 前车速度
v = 30; % 本车速度 30m/s
vlead = 32; % 前车速度 32m/s
J = (v - vlead)^2;
- 然后利用最优控制算法(如 Pontryagin 最小值原理)来求解使这个性能指标最小化的控制输入,从而实现更稳定的跟车过程。
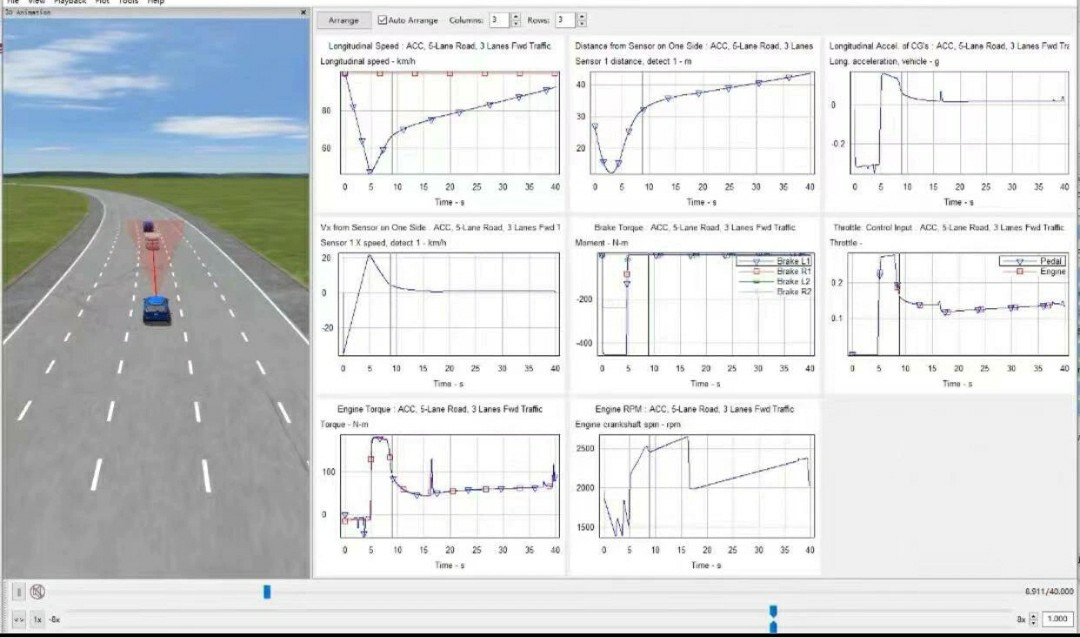
通过将基于模型预测控制和最优控制理论的控制策略集成到 Matlab/Simulink 模型中,并与 Carsim 模型进行联合仿真,我们成功实现了汽车的主动避撞和跟车功能(ACC 自适应巡航)。这种联合仿真方法不仅能够准确模拟车辆在各种工况下的行驶行为,还为进一步优化控制策略提供了有效的手段,对推动汽车自动驾驶技术的发展具有重要意义。
基于模型预测控制(自带的mpc模块)和最优控制理论的Carsim与Matlab/simulink联合仿真实现汽车主动避撞和跟车功能(acc自适应巡航),包含simulink模型(其中有车辆逆纵向动力学模型、逆发动机模型、切换控制逻辑等),Carsim模型
希望本文的介绍能为从事相关领域研究的朋友们提供一些参考和启发,让我们一起在自动驾驶技术的道路上不断探索前进!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 3
3 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)