内置永磁同步电机电流环复矢量解耦控制:原理、实现与应用
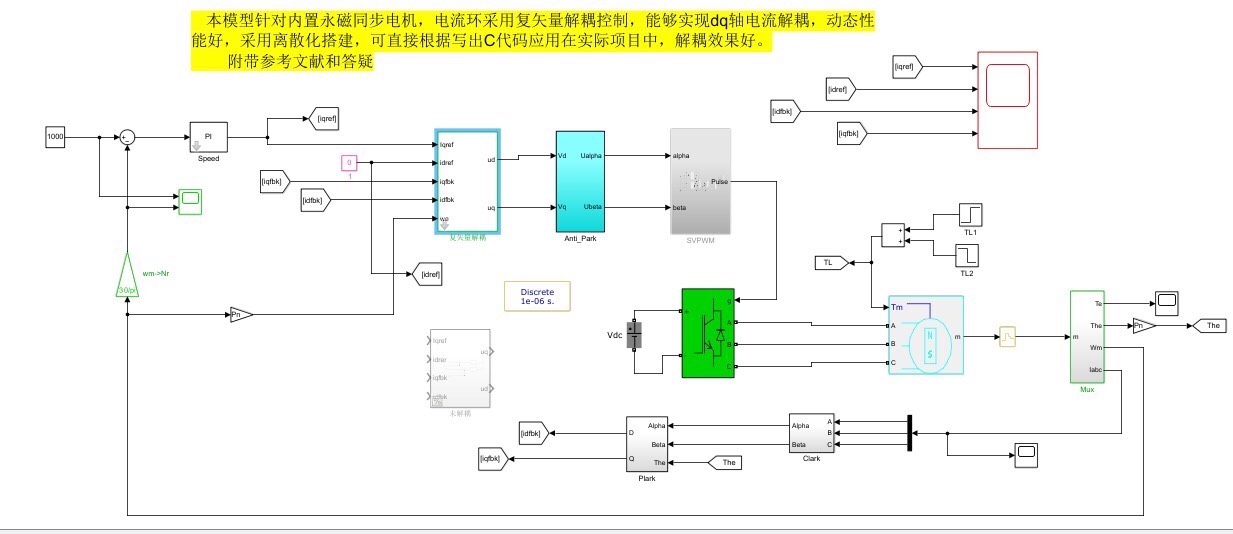
本模型针对内置永磁同步电机,电流环采用复矢量解耦控制,能够实现dq轴电流解耦,动态性能好,采用离散化搭建,可直接根据写出C代码应用在实际项目中,解耦效果好。 附带参考文献
在电机控制领域,内置永磁同步电机(IPMSM)因其高效、高功率密度等优点被广泛应用。而对于IPMSM的精确控制,电流环的设计至关重要。本文将介绍一种基于复矢量解耦控制的电流环设计方法,该方法不仅能实现dq轴电流解耦,还具备良好的动态性能,并且通过离散化搭建后可直接转化为C代码应用于实际项目。
复矢量解耦控制原理
IPMSM在dq旋转坐标系下的数学模型为我们实现解耦控制提供了基础。在这个坐标系中,定子电流可以分解为直轴电流($id$)和交轴电流($iq$)。复矢量解耦控制的核心思想,就是分别对$id$和$iq$进行独立控制,从而实现对电机转矩和磁链的有效控制。
数学模型
IPMSM在dq坐标系下的电压方程为:
\[
\begin{cases}
ud = Rsid + Ld\frac{did}{dt} - \omegaeLqiq \\
uq = Rsiq + Lq\frac{diq}{dt} + \omegaeLdid + \omegae\psif
\end{cases}
\]
其中,$ud$、$uq$为dq轴电压,$Rs$为定子电阻,$Ld$、$Lq$为dq轴电感,$\omegae$为电角速度,$\psi_f$为永磁体磁链。
从上述方程可以看出,$id$和$iq$之间存在耦合关系,这就需要通过解耦控制来消除这种耦合。
解耦实现
为了实现解耦,我们引入解耦项。假设我们希望得到理想的控制效果,即$ud$只控制$id$,$uq$只控制$iq$。那么我们可以构造如下的控制电压:
\[
\begin{cases}
u{d{ref}} = Rsid + Ld\frac{did}{dt} - \omegaeLqiq + u{d_{decouple}} \\
u{q{ref}} = Rsiq + Lq\frac{diq}{dt} + \omegaeLdid + \omegae\psif + u{q_{decouple}}
本模型针对内置永磁同步电机,电流环采用复矢量解耦控制,能够实现dq轴电流解耦,动态性能好,采用离散化搭建,可直接根据写出C代码应用在实际项目中,解耦效果好。 附带参考文献
\end{cases}
\]
其中,$u{d{decouple}} = \omegaeLqiq$,$u{q{decouple}} = -\omegaeLdid - \omegae\psif$,这样就实现了$id$和$iq$的解耦。
离散化搭建
为了能够在实际的数字控制系统中应用,我们需要对上述连续时间的模型进行离散化。这里我们采用一阶向前差分法对导数项进行离散化,即$\frac{di}{dt} \approx \frac{i(k + 1) - i(k)}{Ts}$,其中$Ts$为采样周期,$k$为离散时间点。
以$i_d$通道为例,离散化后的电压方程为:
\[
ud(k) = Rsid(k) + \frac{Ld}{Ts}(id(k + 1) - id(k)) - \omegae(k)Lqiq(k)
\]
整理可得:
\[
id(k + 1) = \frac{Ts}{Ld}(ud(k) - Rsid(k) + \omegae(k)Lqiq(k)) + id(k)
\]
同样地,对于$i_q$通道也可以得到类似的离散化方程。
C代码实现
下面是一个简单的基于上述离散化模型的C代码示例,用于实现$id$和$iq$的解耦控制。
// 定义电机参数
float Rs = 0.5; // 定子电阻
float Ld = 0.001; // d轴电感
float Lq = 0.002; // q轴电感
float psi_f = 0.1; // 永磁体磁链
float Ts = 0.00001; // 采样周期
// 定义变量
float id_ref, iq_ref; // 参考电流
float id, iq; // 当前电流
float w_e; // 电角速度
float ud, uq; // 控制电压
// 离散化控制函数
void ipmsm_control() {
// 计算解耦项
float ud_dec = w_e * Lq * iq;
float uq_dec = -w_e * Ld * id - w_e * psi_f;
// 计算控制电压
ud = Rs * id + (Ld / Ts) * (id_ref - id) + ud_dec;
uq = Rs * iq + (Lq / Ts) * (iq_ref - iq) + uq_dec;
// 更新电流值(这里假设通过电流采样获取新的电流值,实际需连接硬件采样电路)
id = id_ref;
iq = iq_ref;
}在这段代码中,首先定义了电机的各项参数以及相关变量。ipmsm_control函数实现了离散化的解耦控制算法,通过计算解耦项并结合离散化的电压方程来得到控制电压$ud$和$uq$。需要注意的是,代码中更新电流值部分只是一个简单示例,实际应用中需要连接硬件采样电路获取真实的电流值。
效果与优势
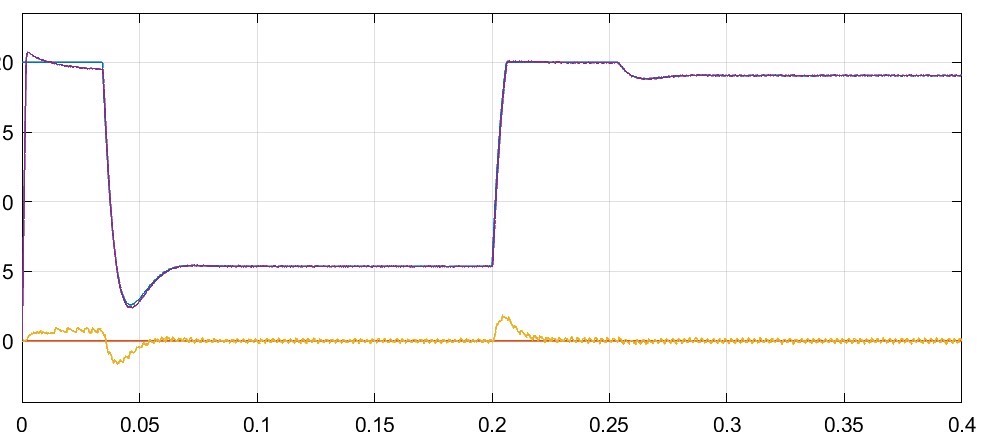
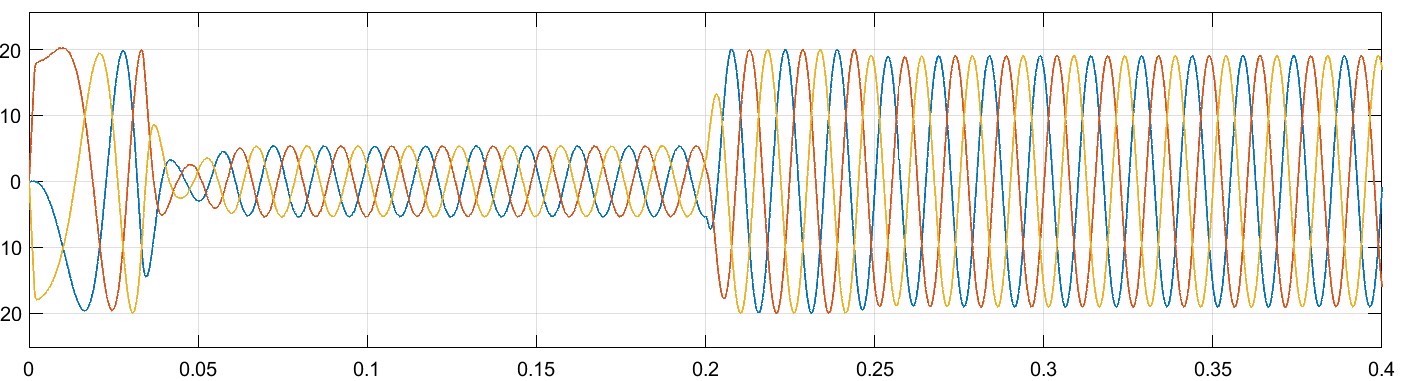
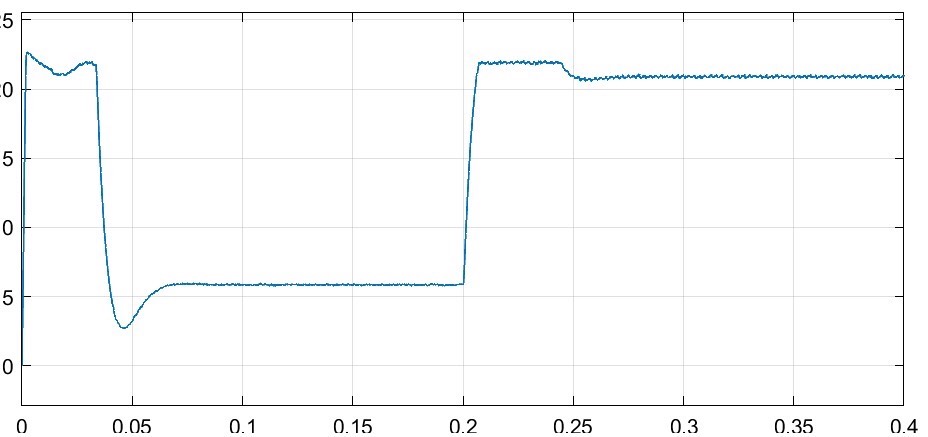
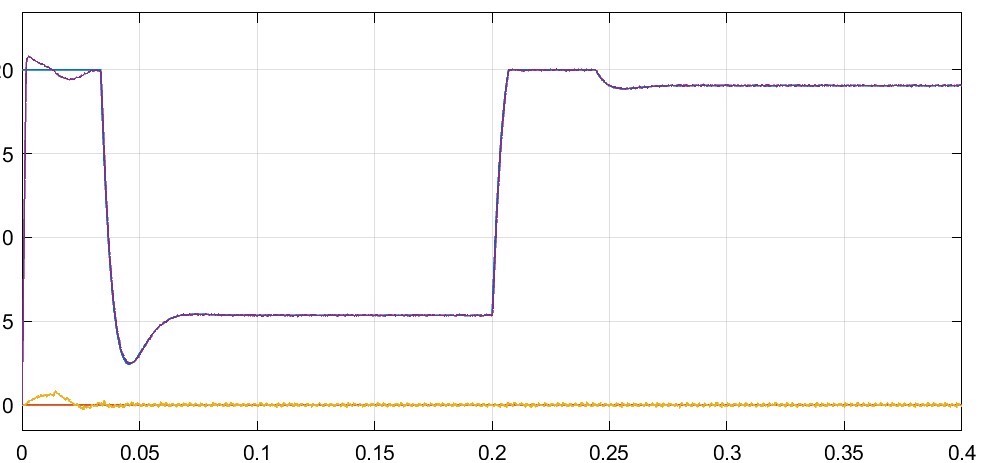
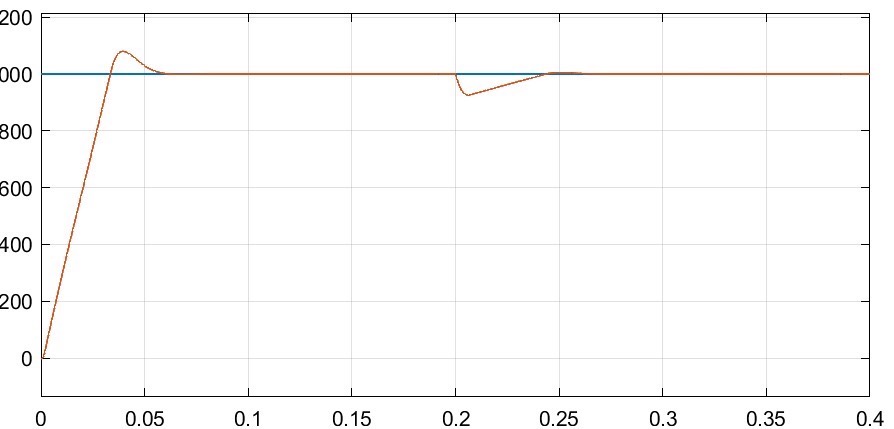
通过上述的复矢量解耦控制和离散化实现,该模型在实际应用中展现出良好的解耦效果和动态性能。它能够快速响应参考电流的变化,有效抑制dq轴电流之间的耦合影响,从而提升电机的整体控制精度和稳定性。
参考文献
[1] 《永磁同步电机直接转矩控制技术》,作者:李夙,机械工业出版社。
[2] 《电机学》,作者:汤蕴璆,机械工业出版社。
希望通过本文的介绍,能让大家对内置永磁同步电机电流环的复矢量解耦控制有更深入的理解,并且在实际项目中能够顺利应用这一技术。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 10
10 0
0- 0



 已为社区贡献42条内容
已为社区贡献42条内容

所有评论(0)