基于串级PID构架的无人机飞行控制系统simulink建模与仿真,包含位置环,姿态环,速率环
目录
1.课题概述
串级PID是无人机主流控制架构,通过位置环、姿态环、角速度速率环三级嵌套,实现从目标定位到电机输出的分层控制,内环快速抗扰、外环精准定姿定位,整体稳定性与响应速度远优于单级PID。
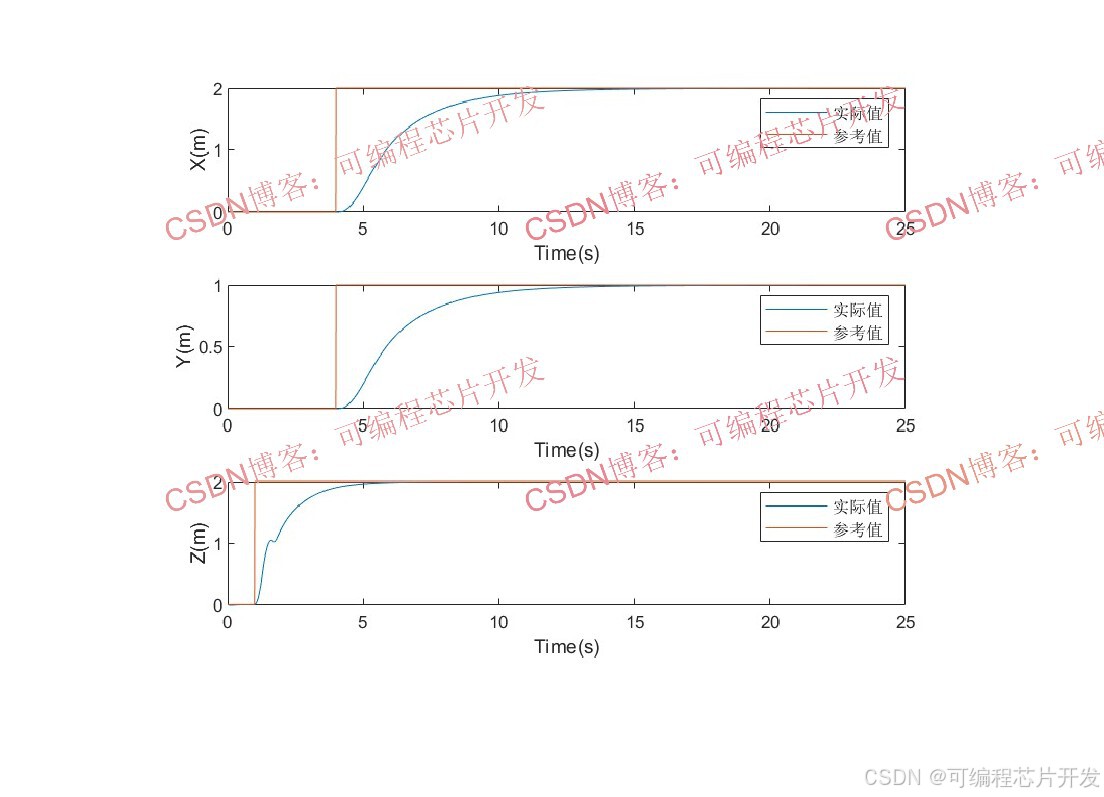
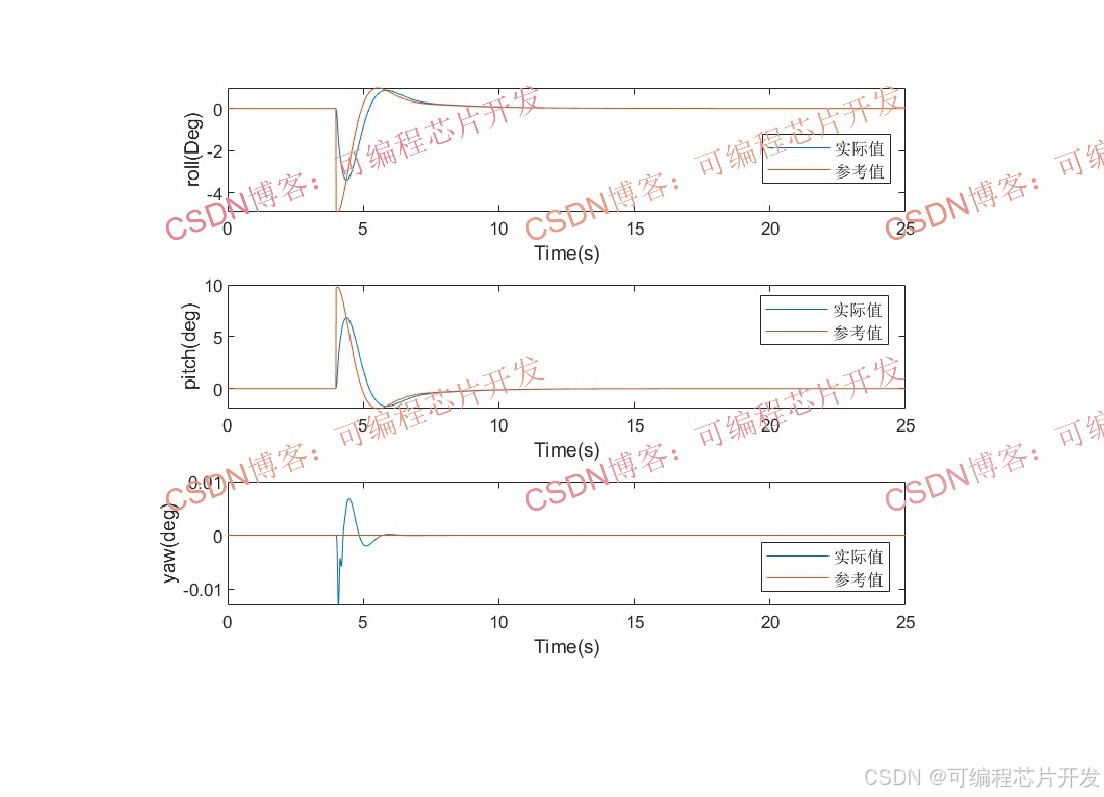
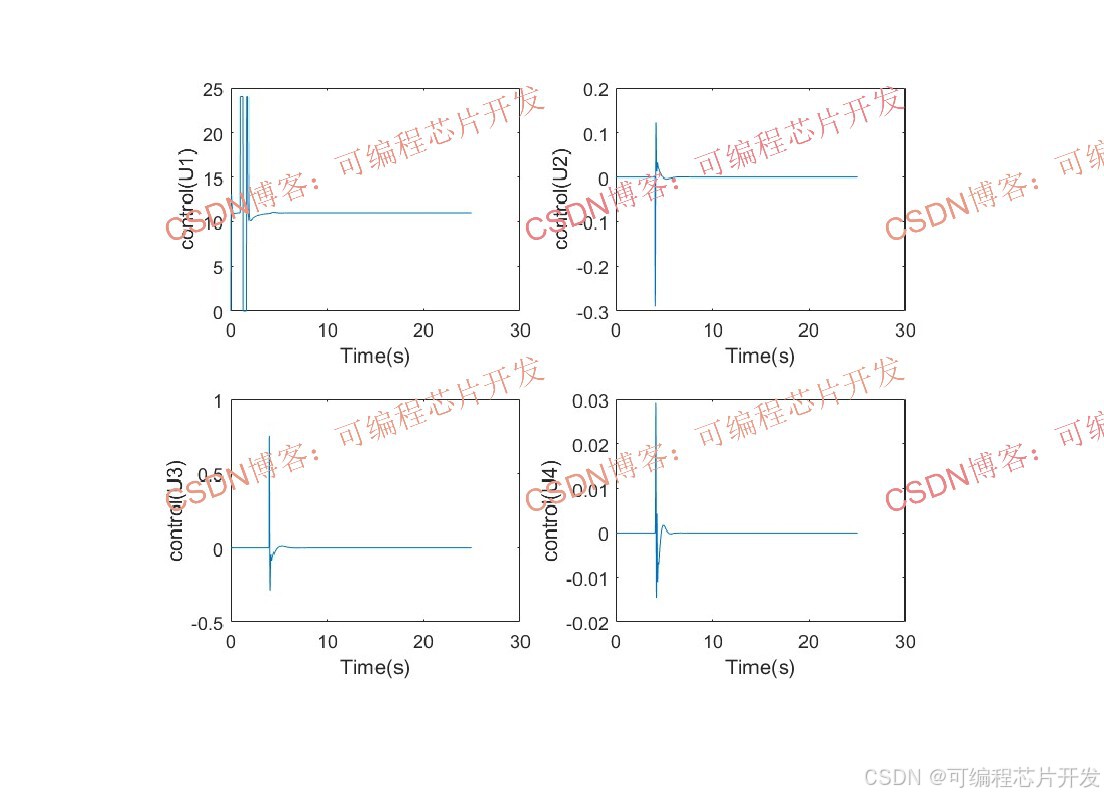
2.系统仿真结果
3.核心程序或模型
版本:Matlab2024b
% 四旋翼无人机动力学模型函数
% 功能:基于输入的控制量(U1-U4),解算无人机的位置、速度、加速度、姿态角、角速度等状态量
function out = func_model(in)
% 输入参数:
% in - 输入数组,各维度含义:
% in(1): U1(总升力控制量)
% in(2): U2(横滚力矩控制量)
% in(3): U3(俯仰力矩控制量)
% in(4): U4(偏航力矩控制量)
% 输出参数:
% out - 输出数组,包含无人机关键状态(地理坐标系):
% out(1): X_GF(X轴位置)
% out(2): Y_GF(Y轴位置)
% out(3): Z_GF(Z轴位置)
% out(4): roll(横滚角,度)
% out(5): pitch(俯仰角,度)
% out(6): yaw(偏航角,度)% 从输入数组提取总升力控制量U1~U4
U1 = in(1);
U2 = in(2);
U3 = in(3);
U4 = in(4);
global sys;% 姿态角更新(前向欧拉积分)
sys.roll = roll_d *sys.Tm + sys.roll;
sys.pitch = pitch_d * sys.Tm + sys.pitch;
sys.yaw = yaw_d * sys.Tm + sys.yaw;147
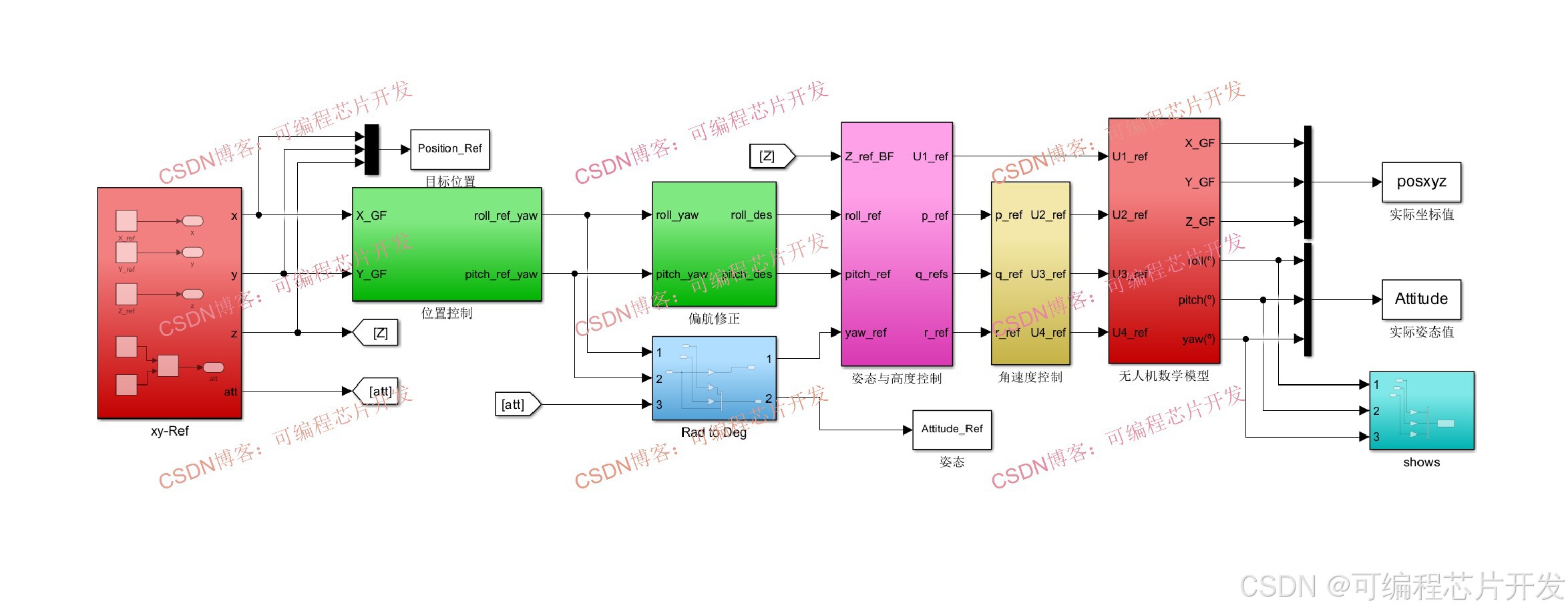
4.系统原理简介
本系统是一个典型的串级PID控制架构,从外到内分为三层闭环:
位置环(外环):根据目标位置与实际位置偏差,生成期望姿态角
姿态环(中环):根据期望姿态与实际姿态偏差,生成期望角速度
速率环(内环):根据期望角速度与实际角速度偏差,生成控制量输入无人机模型
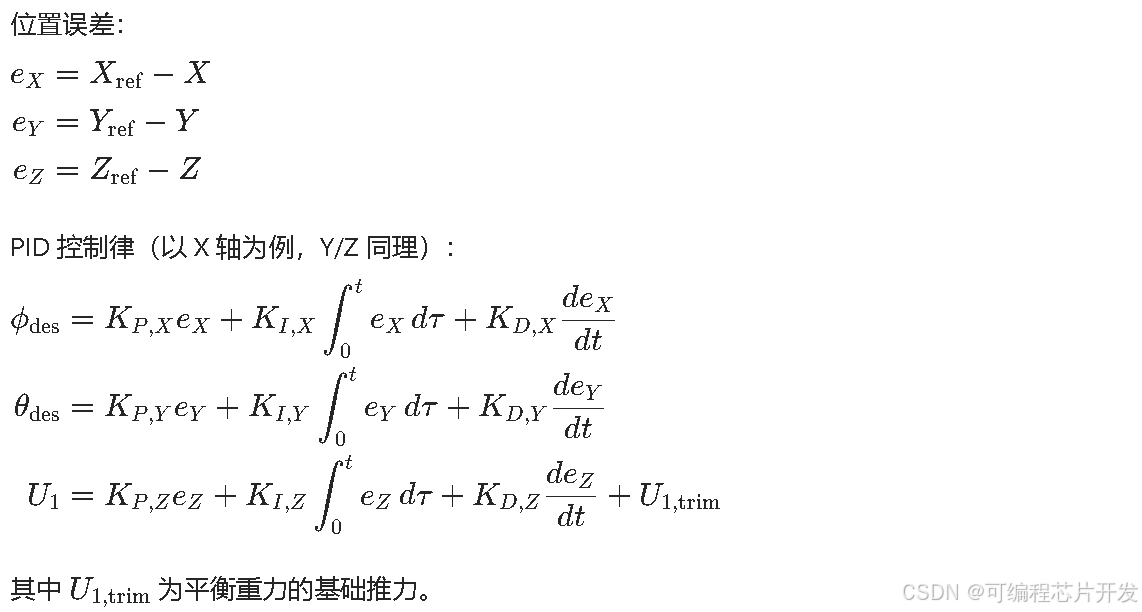
4.1 位置环
将目标位置(Xref,Yref,Zref)与实际位置(X,Y,Z)的偏差,转换为期望姿态角(滚转ϕdes、俯仰θdes)与期望高度Zref,BF。
水平位置(X/Y):通过PID控制器将位置误差映射为姿态角指令,实现水平位移控制;
高度(Z):通过PID控制器将高度误差映射为总推力指令U1,实现垂直位置控制;
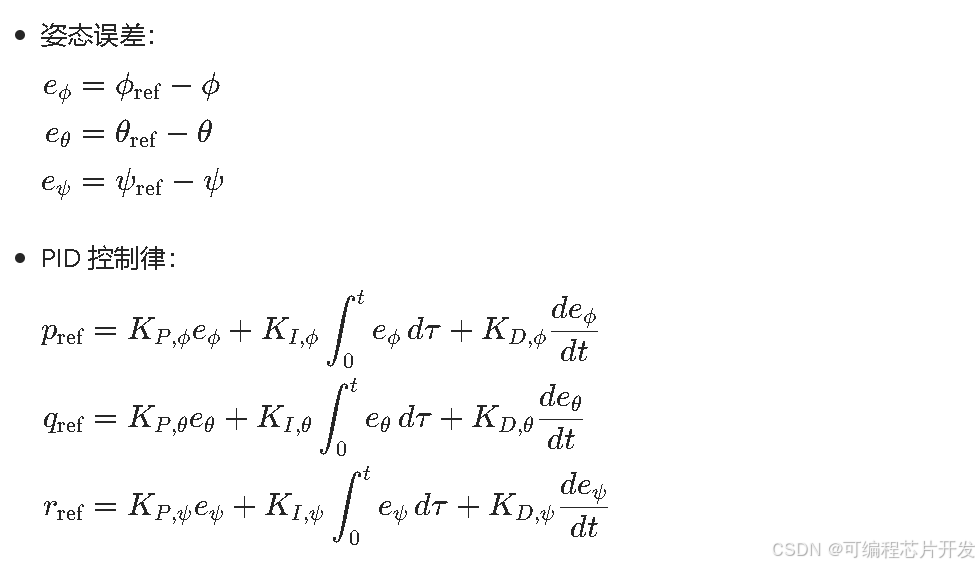
4.2 姿态环
将位置环输出的期望姿态(ϕref,θref,ψref)与实际姿态(ϕ,θ,ψ)的偏差,转换为期望角速度(pref,qref,rref)。
滚转/俯仰:PID控制姿态角误差,输出对应轴角速度指令;
偏航:PID控制偏航角误差,输出偏航角速度指令;
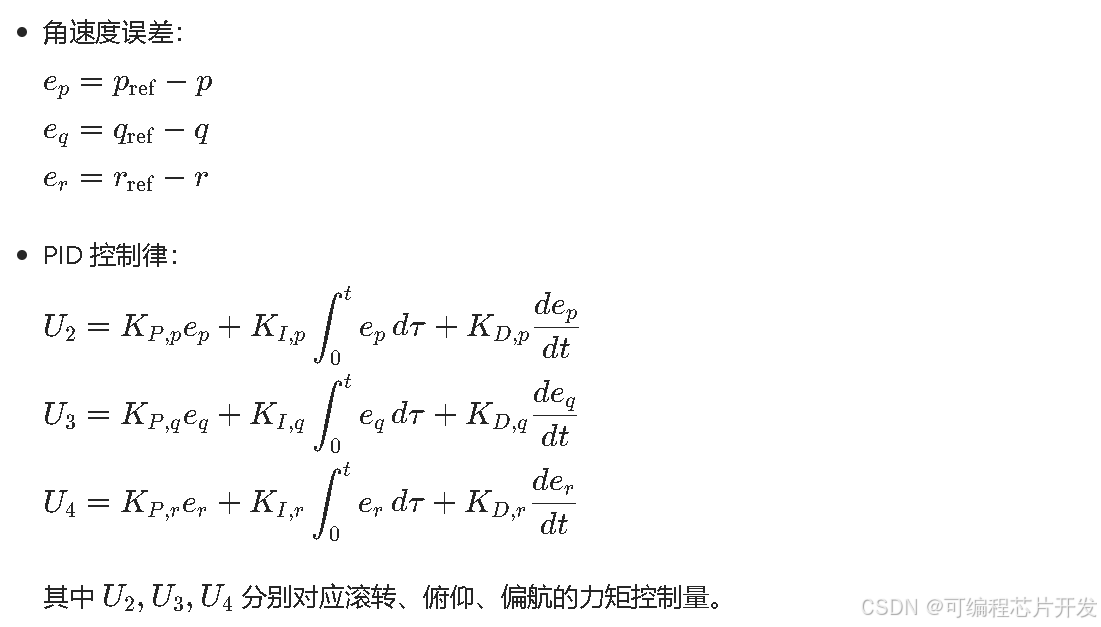
4.3 速率环
将姿态环输出的期望角速度(pref,qref,rref)与实际角速度(p,q,r)的偏差,转换为无人机执行机构控制量 (U2,U3,U4)。
内环直接控制角速度,响应速度最快,抑制姿态环的扰动,保证系统快速稳定;
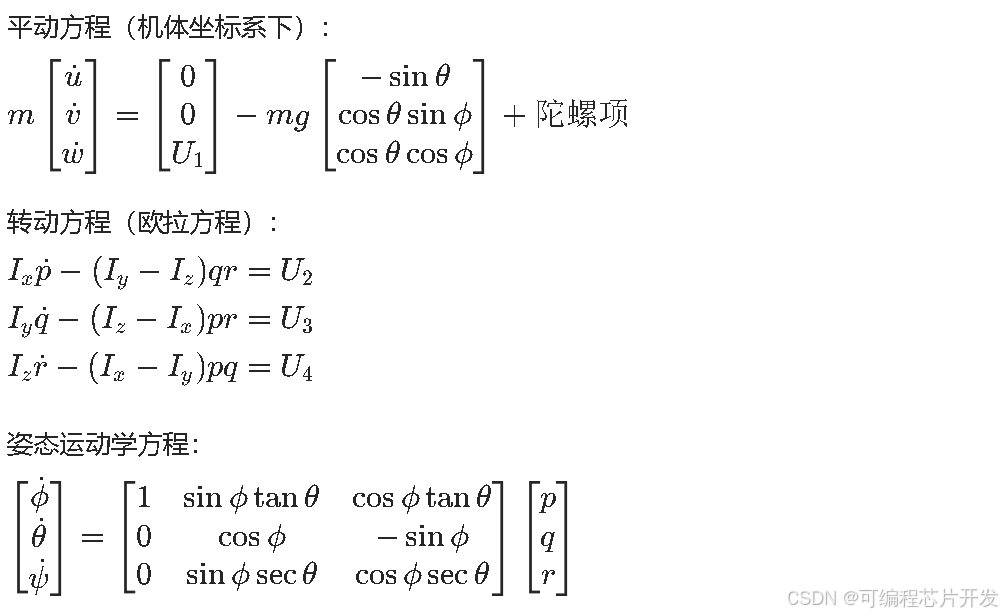
4.4 无人机模型
接收控制量(U1,U2,U3,U4),输出无人机实际位置(X,Y,Z)与姿态(ϕ,θ,ψ),完成控制闭环。
5.完整工程文件
v v
关注后,GZH回复关键词:a31
或回复关键词:pidUAV

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 11
11 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)