动态四足机器人+模型预测(MPC)控制、周期性四足步态Matlab仿真(带参考文献)
✅作者简介:热爱科研的Matlab仿真开发者,擅长毕业设计辅导、数学建模、数据处理、建模仿真、程序设计、完整代码获取、论文复现及科研仿真。
🍎 往期回顾关注个人主页:Matlab科研工作室
👇 关注我领取海量matlab电子书和数学建模资料
🍊个人信条:格物致知,完整Matlab代码获取及仿真咨询内容私信。

🔥 内容介绍
一、动态四足机器人运动控制的挑战
- 多变量强耦合系统
:动态四足机器人由多个关节驱动,每个关节的运动都相互关联,形成了多变量强耦合的复杂系统。例如,腿部的屈伸、摆动动作不仅影响机器人的前进速度,还会对其姿态平衡产生作用。这种强耦合特性使得精确控制机器人的运动变得极为困难,传统控制方法难以有效处理各变量之间的复杂交互关系。
- 三维空间运动的复杂性
:在三维空间中,四足机器人需要应对各种复杂的运动情况,如在崎岖地形行走、跨越障碍物以及完成后空翻等复杂动作。这要求机器人不仅要控制自身的位置,还要精确调整姿态,以保持平衡和实现预期的运动轨迹。此外,三维空间中的运动涉及到旋转动力学,如何准确描述和控制旋转是关键问题之一。
二、MPC 框架用于四足机器人控制的原理
- 模型预测控制基础
:模型预测控制(MPC)的核心在于基于系统模型预测未来状态,并通过优化过程确定当前的最优控制输入。对于四足机器人,首先要建立其动力学模型,该模型能够描述机器人在各种力和力矩作用下的运动状态变化。在每个控制周期,MPC 利用这个模型预测机器人在未来若干时刻的位置、速度、姿态等状态。然后,通过求解一个优化问题,找到能够使机器人达到期望状态的控制输入序列,只将该序列的第一个控制输入应用到机器人上,在下一个控制周期重复上述过程,实现滚动优化控制。
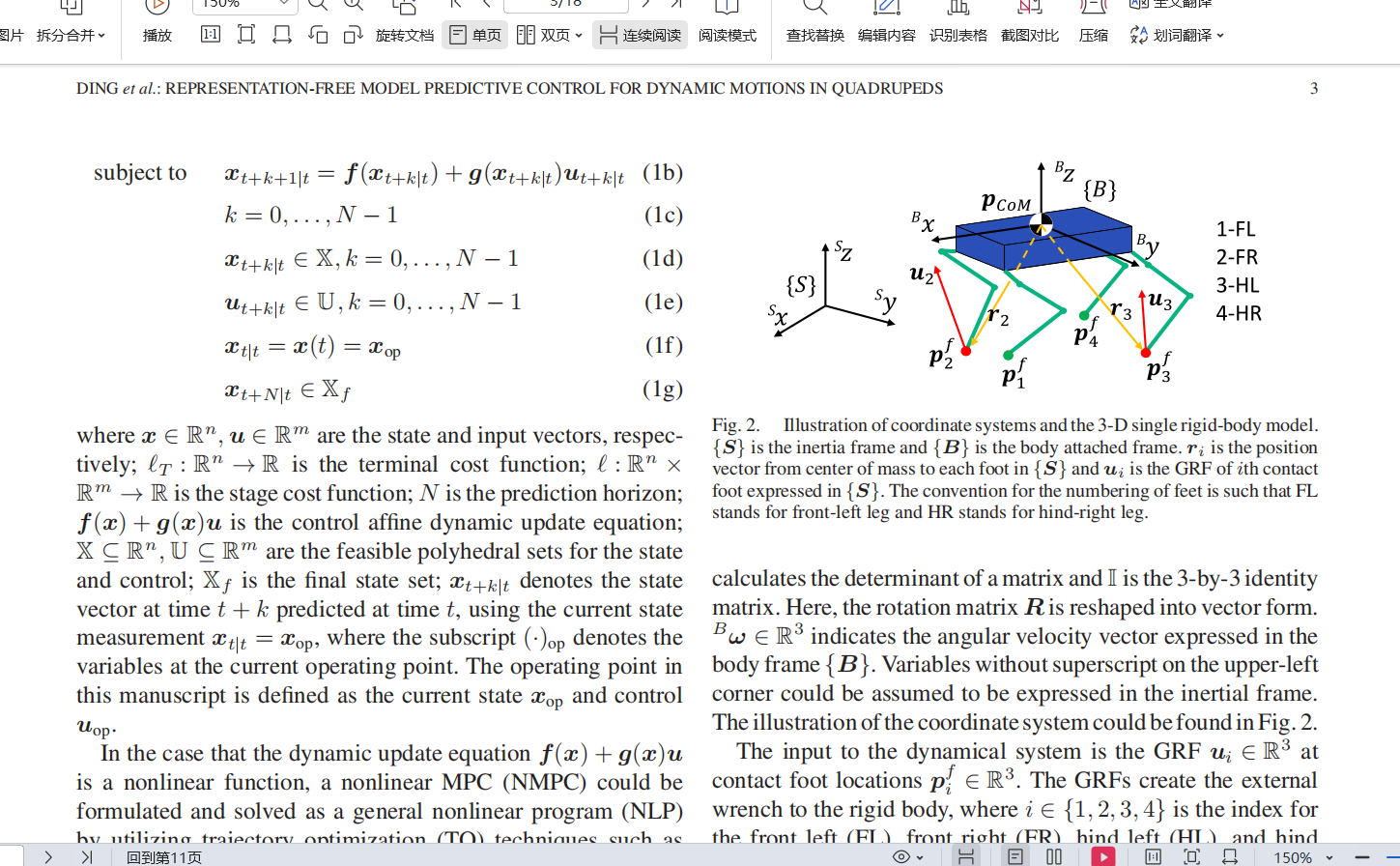
- 旋转矩阵表示旋转动力学
:在描述四足机器人的旋转动力学时,使用旋转矩阵直接表示具有显著优势。传统的欧拉角表示法存在万向节锁问题,即在某些特定姿态下,会丢失一个旋转自由度,导致控制失效。四元数虽然能避免万向节锁,但在物理意义的直观理解和计算复杂度上存在一定不足。而旋转矩阵可以直接、完整地描述三维空间中的旋转,避免了上述问题,为精确控制机器人的旋转运动提供了更可靠的基础。
三、MPC 控制律转化为二次规划形式
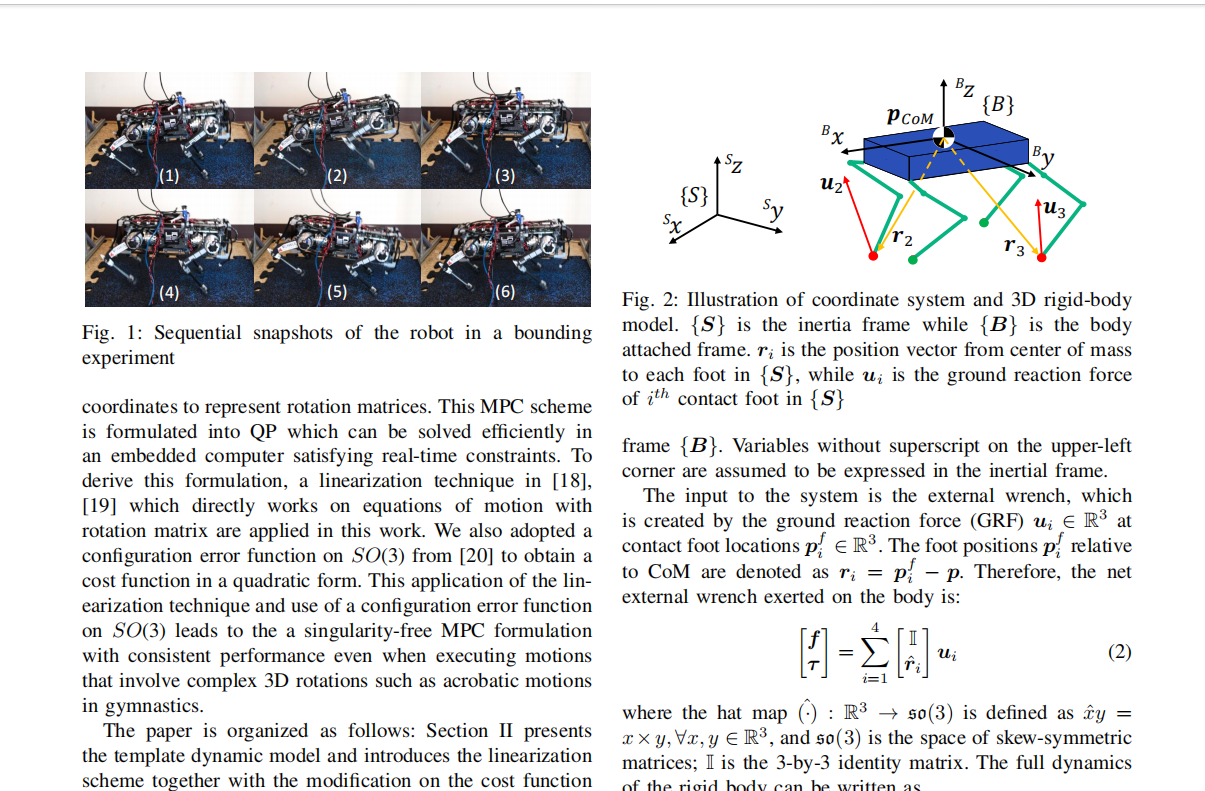
- 基于变化的线性化方案
:四足机器人的动力学模型本质上是非线性的,直接求解优化问题较为困难。为简化计算,采用基于变化的线性化方案。在每个控制周期内,围绕当前工作点对非线性模型进行线性化处理。通过这种方式,将非线性的预测模型转化为线性模型,从而可以利用成熟的线性系统控制理论和优化方法进行求解。这种线性化处理虽然是近似的,但在局部范围内能够有效反映系统的动态特性,并且随着控制周期的推进,不断更新线性化模型,以适应系统状态的变化。
- 精心构建成本函数
:成本函数在 MPC 的优化过程中起着关键作用,它定义了控制目标和期望的系统行为。对于四足机器人,成本函数通常包括多个项,如跟踪误差项,用于衡量机器人当前状态与期望状态(如期望的位置、姿态)之间的差异,通过最小化该项促使机器人向期望状态靠近;控制输入变化项,限制控制输入的剧烈变化,以保证机器人运动的平稳性和安全性;还可能包含与机器人动力学约束相关的项,确保控制输入满足机器人的物理限制。通过精心构建成本函数,将 MPC 的优化问题转化为标准的二次规划形式,使得可以利用高效的二次规划求解器快速计算出最优控制输入。

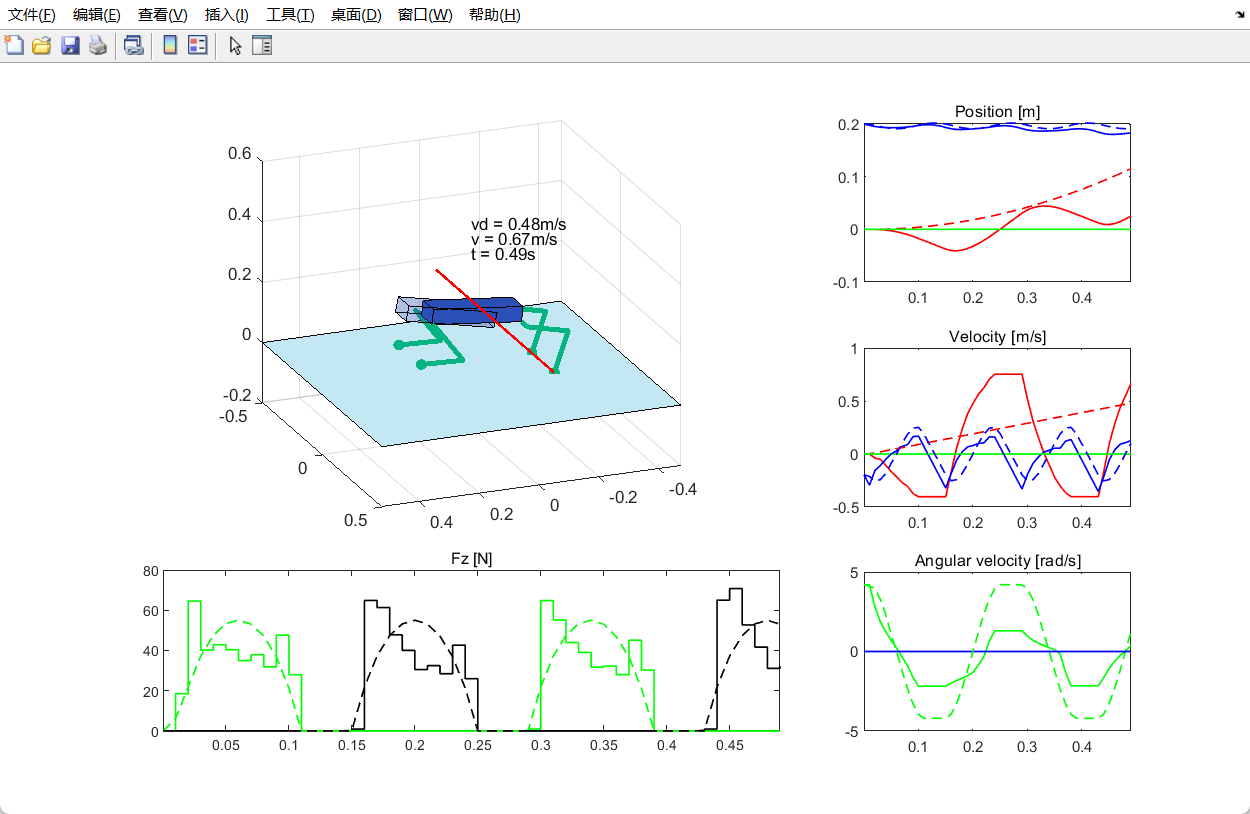
⛳️ 运行结果

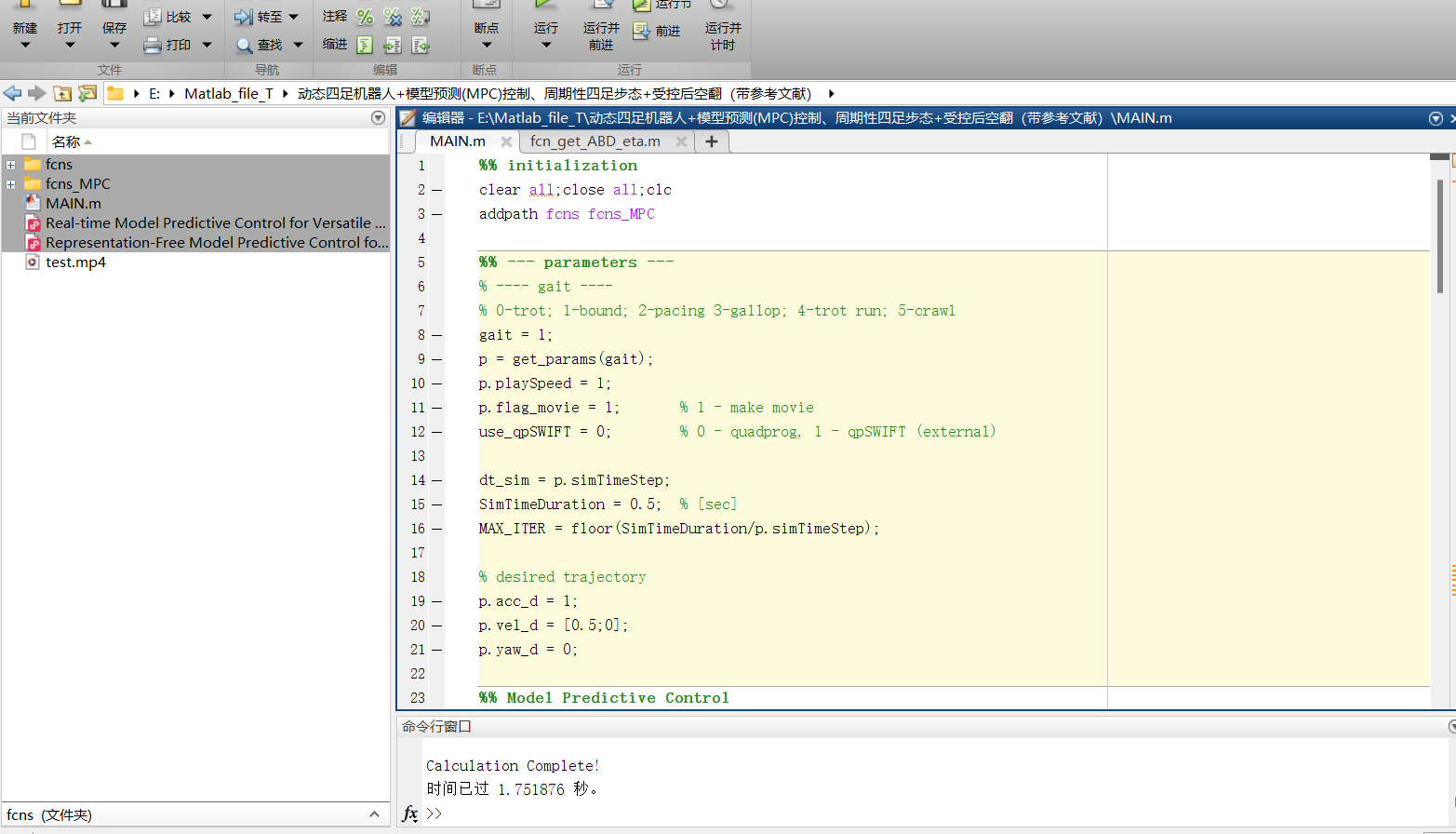
📣 部分代码

🔗 参考文献
🍅往期回顾扫扫下方二维码

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 1
1 0
0- 0



 已为社区贡献23条内容
已为社区贡献23条内容

所有评论(0)