扑翼柔性变形的建模与控制-只看飞行器即可
paper 1:总体设计介绍(2022)
A Bio-Inspired Flapping-Wing Robot With Cambered Wings and Its Application in Autonomous Airdrop (仿生扑翼飞行器,带有弯度的翼)
1. 飞行器的设计目标
开头常用的引言:夸自然界,夸已有的模仿研究,然而还有不足需要研究,为此我们做了xxx。在摘要的时候简略描述,如下:Flapping-wing flight, as the distinctive flight method retained by natural flying creatures, contains profound aerodynamic principles and brings great inspirations and encouragements to drone developers. Though some ingenious flapping-wing robots have been designed during the past two decades, development and application of autonomous flapping-wing robots are less successful and still require further research. Here, we report xxx
另一个案例:Locusts have various motion modes among which they continuously switch in terrestrial and aerial domains, hence achieving high environmental adaptability. Several robots have been developed to mimic the jump–gliding locomotion of locusts, but their mobility and transitional stability are limited because of structural and control limitations at a small scale. In this article, we develop xxx
本飞行器的特点:Inspired by birds, a camber structure and a dihedral angle adjustment mechanism are introduced into the airfoil design and motion control of the wings, respectively.
本飞行器瞄准的目标:It can significantly improve the gliding performance of the robot, which is beneficial to the execution of the airdrop mission. 最终任务目标:设计一种具备可控投放装置的仿生扑翼机器人,并实现空投任务的自主控制。
另外,什么是airdrop mission? 从高空丢下来?还是像纸飞机一样扔出去?(答:是空投。空投作为一种高效便捷的运输方式,自第二次世界大战首次应用以来,已被广泛用于向其他难以抵达或不易接近的区域运送物资。过去几十年来,无人机(UAVs),尤其是旋翼类无人机的出现与发展,凭借其在狭小工作空间内的灵活机动能力以及与人员近距离作业的优势,进一步拓展了空投技术的应用场景[1]。部分应用(如无人机快递)正逐步实现商业化。然而,旋翼无人机存在能耗高、噪声扰民以及安全风险等问题,限制了其在某些特殊场景中的应用)
2. 本飞行器的特点
讲其他飞行器的问题:However, SmartBird, Dove and E-Flap use a single motor to flap both wings, which couples and synchronizes motions of the wings and only provides variable rate flapping at constant amplitude.
(两边的翼只能共同扑动,且仅能实现恒定扑幅下的可变频率扑动。)
(难道本文这个翼,还能改变扑动幅度?)In this paper, 介绍一款all servo-driven flapping-wing robot named USTBird-I,质量151.7 g,翼展120 cm. 核心特点:双翼各自由舵机独立驱动,故转弯(steering control)可以通过左右翼的差动运动来实现,不需要依赖尾翼。可以在滞空10min。
驱动上的严重特点:纯servo driven,意味着不是通过齿轮传动与电机组合实现扑翼运动的,而是纯舵机驱动、机翼独立控制。舵机质量比较好?舵机是怎样的,是不是比较重?
舵机驱动的好处:舵机作为一种闭环位置可控的电机替代方案,进入了我们的研究视野。在舵机驱动下,扑翼的位置与速度均可精确控制,这与飞行动物的扑翼方式更为接近 [45],[46]。同时,采用舵机可以避免因复杂传动结构的反复试错设计带来的不必要成本。难道没有代价吗?这是最简单的变扑动幅度方式?
此外该机在机翼的翼型设计与运动控制中引入了弯度结构与上反角调节机构,实践证明这是提升机器人滑翔性能的有效手段。
第二节介绍扑翼机器人的研制过程;第三节阐述自主空投任务的实现方法;最后,第四节给出结论并指出未来研究方向。只需要看第二节、第四节。
3. 详细看飞行器的研制过程
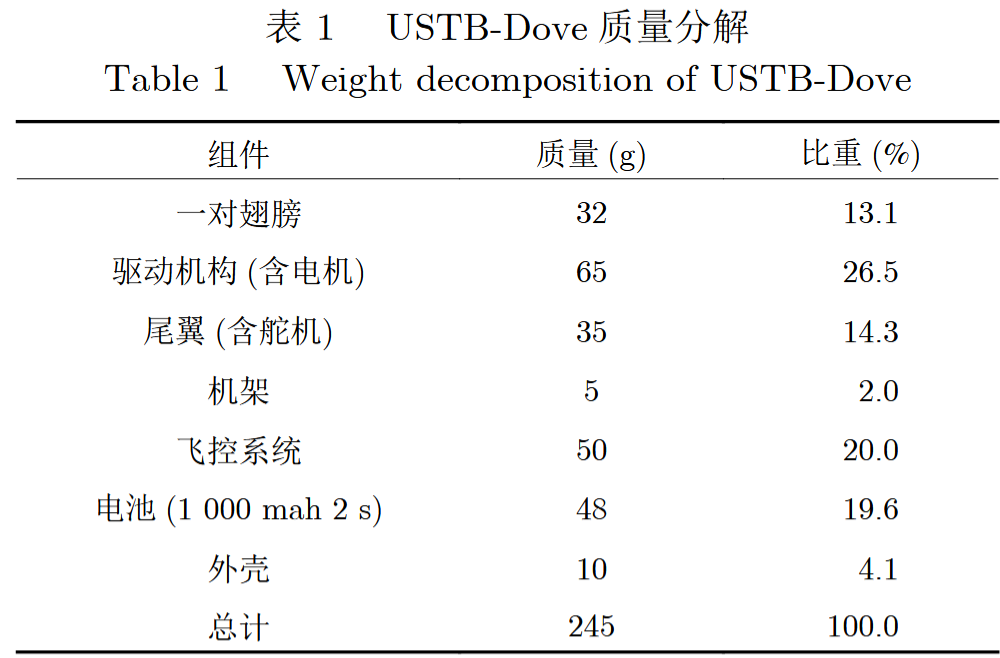
重量的拆解:每个舵机重量有20g;翼也比较重。舵机的重量占比25%,和翼相近。
但让机身变得比较轻了。
舵机的型号:Two DEKO HV1295 servos are used to independently drive the two flapping wings
扑翼的运动模式
其中U是可调控的偏置量(通过舵机实现,也相当于上反角),A是可调控的扑动幅度,f是可调控的扑动频率。
下图展示上反角:

最终上反角设计为2°,从升阻比的角度考虑。也提到了上反角对滑翔稳定性有好处。
下图讲三轴控制的实现:
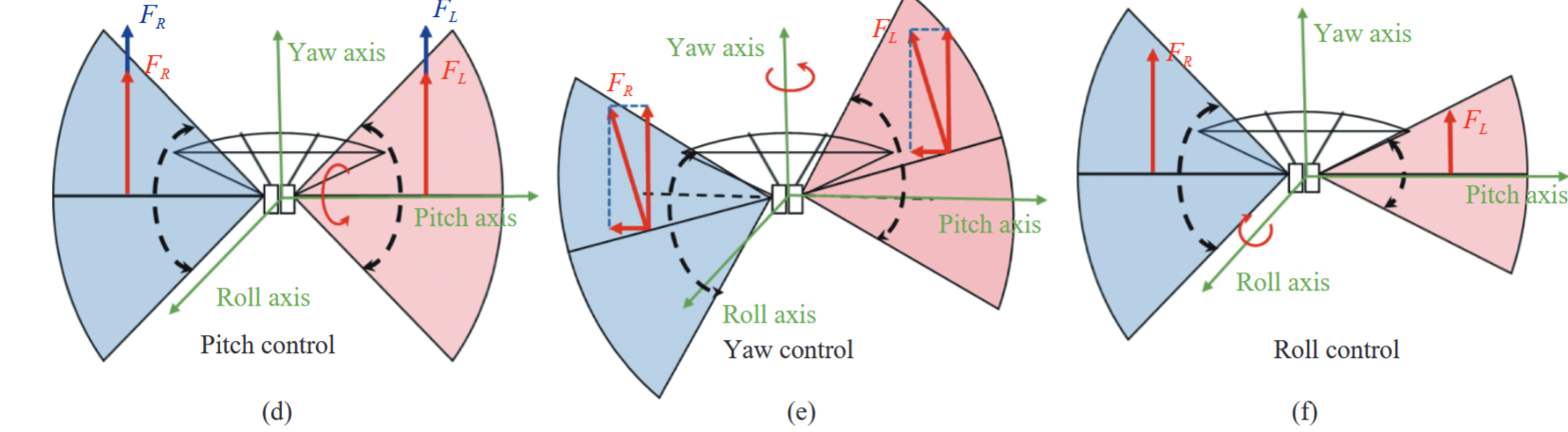
俯仰,是让两边的力同时增加,如何实现的?答:改变扑动频率。平常频率只有2-4Hz。
偏航,是让力有一个横向倾斜分量
滚转,是让一边的力增大,另一边的力减小。如何实现的?答:改变扑动幅度。
后面就在讲如何完成空投动作了,暂时不关心:Moreover, a vision-based airdrop experiment has been conducted on the robot, which is the first demonstration of an autonomous airdrop mission by a flapping-wing robot.
Paper2 基于高仿生形态布局的仿鸽扑翼飞行机器人系统设计2023(尾翼的作用,风洞试验装置,都整理到尾翼设计报告中)
此外,主翼张紧程度的影响,也应当提高意识。
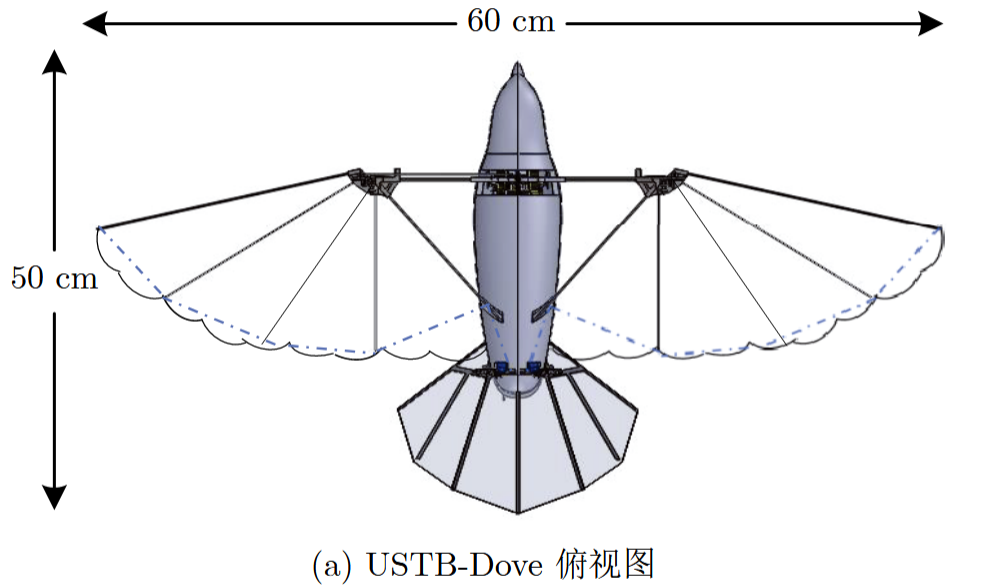
提出一种形态布局与鸽子相仿的扑翼飞行机器人——USTB-Dove的系统设计及实现方案,翼展 60 cm, 最大起飞重量245 g(好像比USTB-1更重了), 飞行平稳, 转向灵活。
本文最终设计了一款具备弧面−折翼−后掠翅膀和仿鸟扇形尾翼的仿鸽扑翼飞行机器人平台 USTB-Dove, 其尾翼挨近翅膀后缘布置,下扑角和尾翼可以共同调节俯仰平衡, 外段翅膀收缩可控制转向, 气动布局和飞行控制方式与真实鸟类相近。提高了扑翼机器人的形态仿生度。
1. 文献综述部分
对已有的扑翼飞行器,介绍还算全面
(1)尾翼布置和现有扑翼飞行器的区别
尾翼布置位置:从传统的远离,到更仿生的接近。在实现飞行稳定性和姿态控制方面, 仿鸟扑翼机器人多采用尾翼远离翅膀布局的方式, 在 翼展 1 m 以下的中小型扑翼飞行机器人中表现明显。但是对传统布局的劣势,说的有点牵强,只是外观不仿生,其实别人用起来还可以:采用了尾翼远离翅膀的布局方式来实现飞行平台负载、续航、稳定性或者机动性的提升, 这使得扑翼平台缺失尾翼挨近翅膀后缘布置这一主要生物特征,降低了仿生度. 这样的设计虽然有利于提高其完成飞行任务的能力, 却使扑翼机器 人的仿生优势下降, 使其在对肉眼可见的直观形象 要求较高的场合出现外形和飞行形态达不到期望要 求的情况, 如在进行低空隐蔽飞行或者观赏性的飞行任务时会丧失扑翼机器人独特的仿生优势.” (贺, p. 309)

依据的是鸟类的尾巴位置:和大多数鸟一样, 在形态布局上, 鸽子尾巴根部靠近翅膀后缘, 翅膀和尾翼之间并没有大的间隔(具体是多大啊.
尾翼靠得近还有好处:这样的布局方式 也使鸽子飞行时较好地保持了整体流线型的外形, 有利于减小空气阻力, 相关研究表明尾翼在鸟类飞行的机动性、稳定性、产生升力、减小阻力方面都有潜在气动作用[30−31]. 从侧面来看, 飞行中的鸽子躯体、翅膀 和尾翼成为一体呈流线型, 这极大减小了飞行中遇 到的空气阻力, 相关研究认为鸟类的尾翼甚至起到 了类似固定翼飞机襟翼的作用, 提高了整体升力[36]。
(2)扑翼可能进行的调控
鸟类的翅膀可调控:早期相关研究表明鸽子起飞时翅膀扑动幅度可以达到约 150°, 正常平飞时约为 90°, 而尾翼除了在起飞、降落、急速转弯等过程中有较大动作外,在平稳飞行过程中相对背部基本没有上翘角度. (意思可能是尾翼能控,但是用来做机动的,日常的配平和增稳 用量很小)
扑翼起到的作用:研究人员通过对鸽子肌肉和拍翅的细致研究得出结论, 可 扭转变形的折翼翅膀及可开裂羽毛使翅膀上抬时受的阻力约降低为下扑时受力的 1/6, 负升力很小, 因此鸽子飞行的动力主要是翅膀下扑产生的, 而不同飞行阶段扑动幅度的调整起到了对俯仰力矩的主要调节作用[21−23].
2.俯仰力矩的配平方式
和我们的思想有共通之处,不依赖复杂的尾翼调控。让翅膀发挥主要的控制作用,尾翼是辅助。
舵效大小如何,是否会做仿真研究呢?还是说纯用实验来尝试的?
俯仰控制: 设计结合下扑角调控无需尾翼大角度上翘的俯仰控制方式, 以及不依赖于尾翼的翅膀收缩转向控制方式, 在提高仿生度的同时保证飞行控制的有效性。通过配置翅膀的下扑角度来平衡俯仰力矩(能平衡掉吗,俯仰力矩的组成都有哪几部分), 使尾翼可通过微调上下翘动角度配合翅膀下扑角,来实现对整机俯仰角的调节。
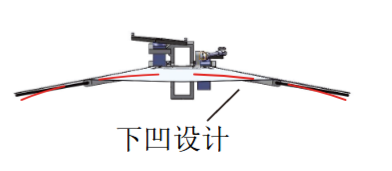
3. 尾翼的设计(记得补充到报告中,+1)
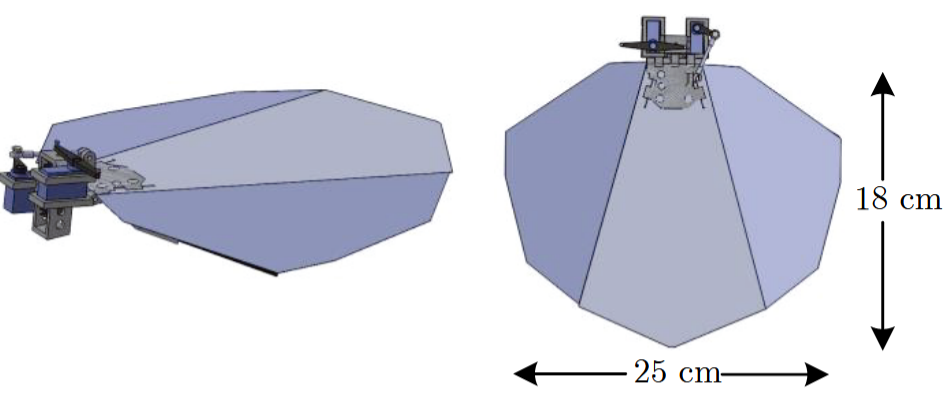
尾翼采用仿鸟扇形尾翼设计, 由碳纤维杆、塑料插接件和塑料薄膜构成; 能展开收起吗?恐怕不能,只能俯仰偏转。机体尾部安装了一 舵机调整尾翼与机身在水平方向的夹角, 以控制飞行中的俯仰角;
好像还有一个功能:另一枚舵机安装拉线控制机构, 通过连接至翅膀边缘的拉索来改变翅膀状态, 达到转向控制的目的;(不是全靠翅膀吗)错误,这个是用来控制翅膀扑动姿态的,和尾翼无关。
4. 扑动机构的能力(比较实在)
驱动机构采用空间曲柄摇杆机构设计, 与机身装配在一起, 通过一个无刷直流电机驱动, 驱动机构连接至翅膀摆臂的球头拉杆配备了微型步进电机, 可以电动控制伸缩, 实现拉杆整体长度的调节, 从而方便地调节翅膀下扑的角度.
鸟类的翅膀扑动可以高效地产生升力和推力, 在下扑行程中翅膀羽毛闭合, 外段翅膀大角度地下折,充 分地对空气做功, 上抬时翅膀扭转变形减小迎风面积, 同时羽毛开缝, 极大地减小了负升力[21]. 充分模仿鸟类翅膀的弯折和扭转方式可以极大地提高扑翼效率[24−26], 但是考虑到小翼展扑翼机负载能力有限,同时高频扑动的翅膀限制了机械复杂度,实际上并没实现对翼扑动和扭转的精密主动控制。本文的折翼翅膀利用简单的拉杆机构来实现外段翼周期性的弯折(对扭转有什么控制吗), 这种方式对扑翼效率的提升有限, 但是却可以使翅膀扑动形态更加接近真实鸟类.
如果能控制住、干预好上下拍的扭转,会是很令人欣慰、很有帮助的。
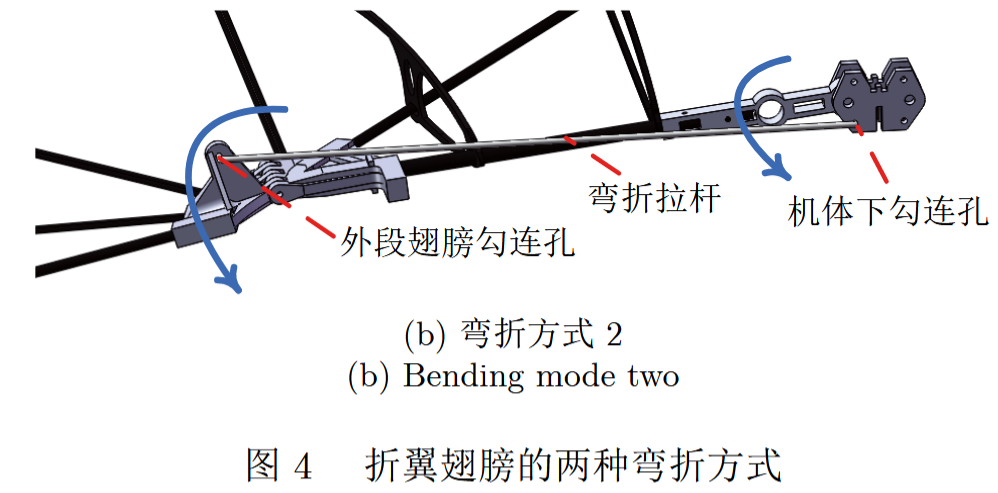
简单的拉杆机构,实现翼弯折的示意图如下。翅膀弯折由拉杆实现。细钢丝制成的拉杆一端连接到机身上翅膀连接件的机体勾连孔内, 另一端连接到外段翼翅膀 3D 打印件的勾连孔内. 当翅膀在驱动机构带动下上下往复扑动时, 翅膀弯折轴心到机体勾连孔的距离发生变化, 而两个勾连孔的距离不变, 从而使得内外段翼翅膀弯。
有两种勾连的位置。当拉杆勾连至上固定孔时, 在下扑过程中外段翼翅膀相对 内段翅膀向上弯折, 当勾连至下固定孔时, 在下扑过程中外段翼翅膀会相对内段翅膀向下弯折。明显下勾连是更合理的试验表明,上勾连模式扑动时产生的阻力较大, 净推力较小, 而下勾连的折翼型式 更有利于产生升力和推力。
5. 风洞试验(支架是最重要的参考,整理到文档中)
试验装置和设备
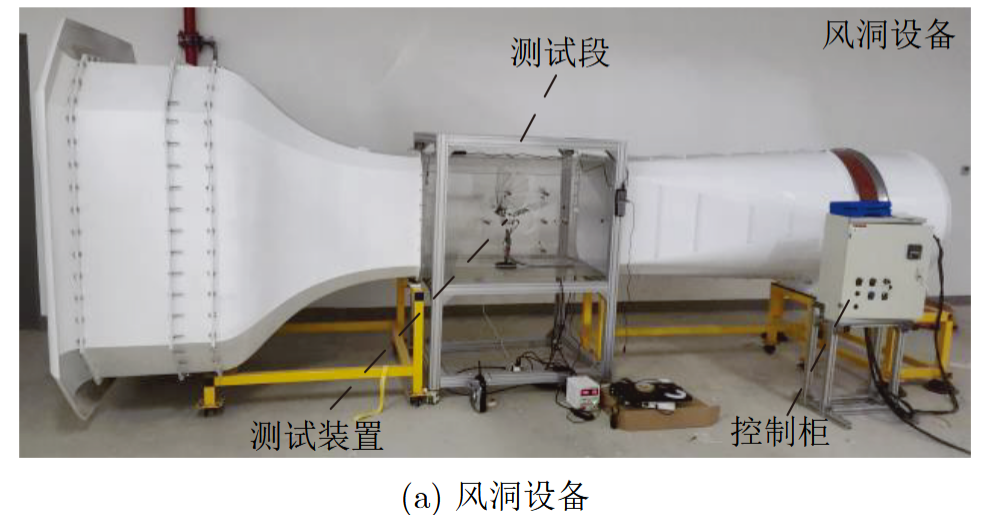
翼的升推力特性对比通过风洞测试来进行[28−29]. 本次使用的风洞设备为南京比贝公司的 CT-ND7070 直流风洞, 实验段尺寸为 1.2 m × 0.7 m × 0.7 m (长 × 宽 × 高), 风速范围为 0 ~ 15 m/s, 风速控制精度为 0.1 m/s, 满足实验测试需求.
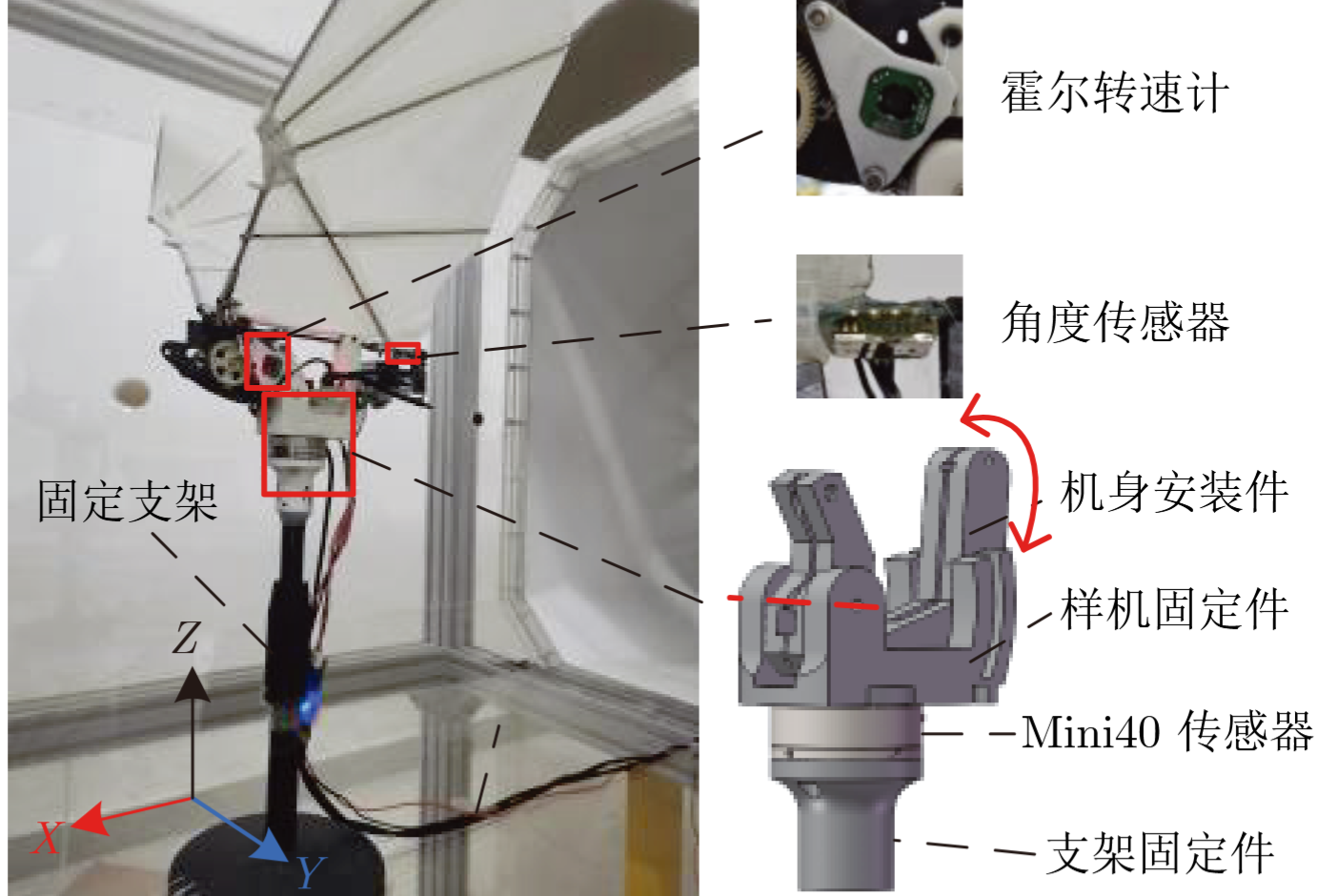
传感器:Mini40 传感器是一种六轴力/力矩传感器, X, Y 轴测力量程为±40 N, 分辨率为 0.01 N, Z 轴测 力量程为±120 N, 分辨率为 0.02 N; X, Y, Z 轴扭 矩量程为±2 N·m, 分辨率均为 0.00025 N·m
重要:机身-传感器连接件的设计(我的尾翼安装可以参考)
设计成熟后,机身的安装也可以参考这个。先从尾翼做起,会更简单一些。
为了尽可能减小翅膀扑动时机身抖动带来的测试误差, 本文设计了专用的 3D 打印件, 将机体与传 感器固联在一起, 机身固定件与样机固定件之间的角度可调,从而使得机身攻角方便调节
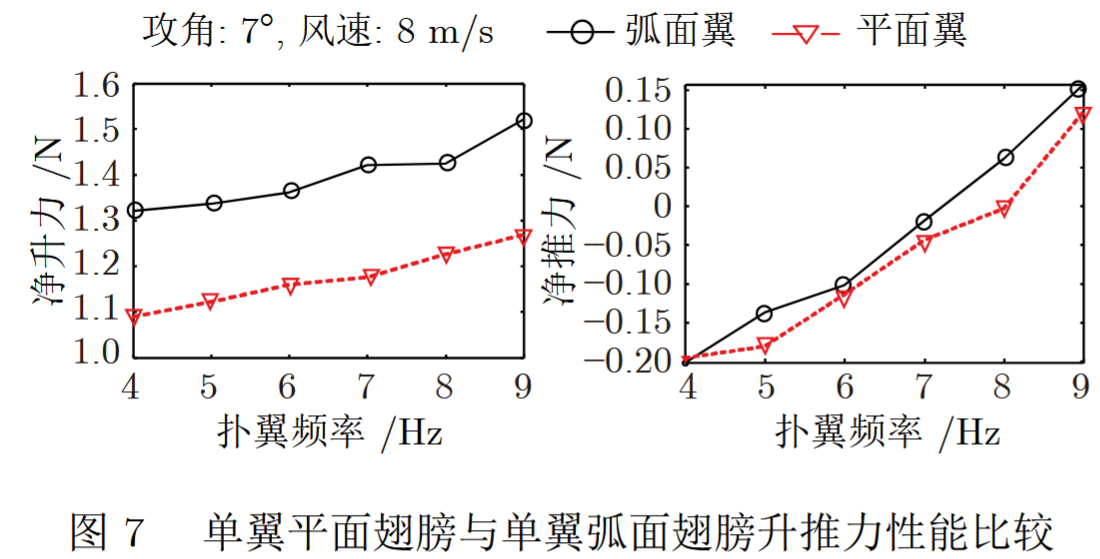
工况:风速8m/s,频率4-9Hz。
他们这种翼,是没有什么俯仰变形的吧。看起来都很固定。不,多少也会有一些的。
结论1:当攻角、风速和下扑角一致时, 单翼弧面翅膀产生的升力要远大于平面翅膀, 而二者产生的 推力相差不大.
结论2:同样的攻角、风速和扑频, 平面翅膀的升力随着下扑角增大,先增大后减小, 推力先减小后增大;弧面翅膀随着下扑角的增大升力会增大, 而推力变化不大; 而两种翅膀的低头力矩均随着下扑角的增大一致减小.(下扑角,是身体中面以下的扑动范围吗?)
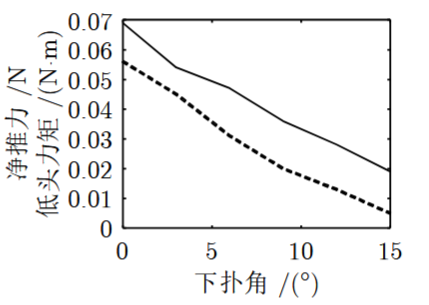
利用结论2可以知道:可以选择增大下扑角来增大抬头力矩, 这有助于调整整机的俯仰平衡.不认可,只能说是减少低头力矩吧。
6. 尾翼的设计和控制
真实的鸟类在飞行过程中可以灵活地调节翅膀、尾翼及躯体来调节飞行姿态, 相关研究表明尾翼在 鸟类飞行的机动性、稳定性、产生升力、减小阻力方面都有潜在气动作用[30−31].
为了减小空气阻力, 将尾翼与机体轴线平行布置, 减小飞行过程中的迎 风面,
关心的问题:尾翼如何与扑翼配合。
发现尾翼转向的力矩不够,因此放弃用尾翼来控制转向, 仅通过尾翼实现航向稳定和俯仰调节, 而将转向控制设计在直接产生动力的翅膀上。
几种方案:
(1)上下左右偏转的扇形 (2) 倒V尾,末端的差动、开叉舵面
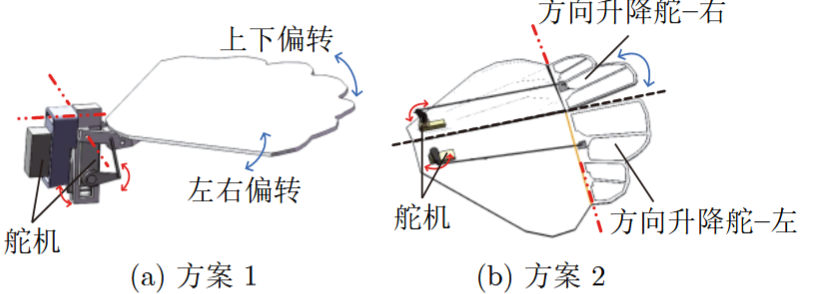
方案 3 将平面扇形尾翼分为两侧差动舵面和中部安定面, 当两侧舵面朝同一侧偏转时可以控制转向, 向相反方向偏转时可以控制俯仰.
方案4很有意思,而且把俯仰、偏航,分别独立丢给一个舵机来实现的思想,和我们做的改进是类似的。虽然都是两个舵机来负责,但是分开(串联式而非并联),能保证各自充分利用好行程,减少行程挤占的问题。
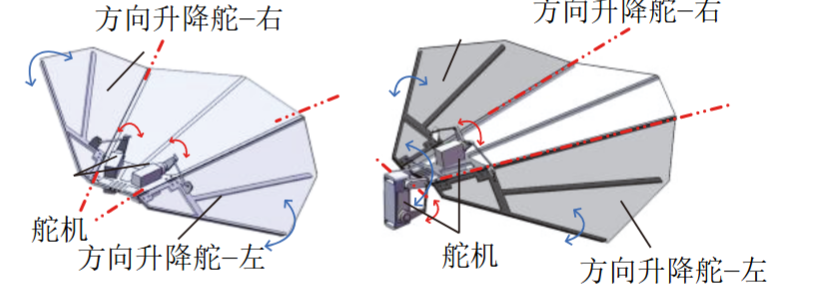
方案 3 (图 10(c)) 将平面扇形尾翼分为两侧差动舵面和中部安定面, 当两侧舵面朝同一侧偏转时可以控制转向, 向相反方向偏转时可以控制俯仰. 此种尾翼相比方案 2 较好地保持了完整的扇形外形, 但是俯仰力矩的调节作用减弱.
方案 4 (图 10(d)) 在方案 3 的基础上将俯仰和转向用两枚舵机独立控制, 增强了俯仰调节作用, 安定面的存在使其在转向控制上相比方案 1 更 平稳。
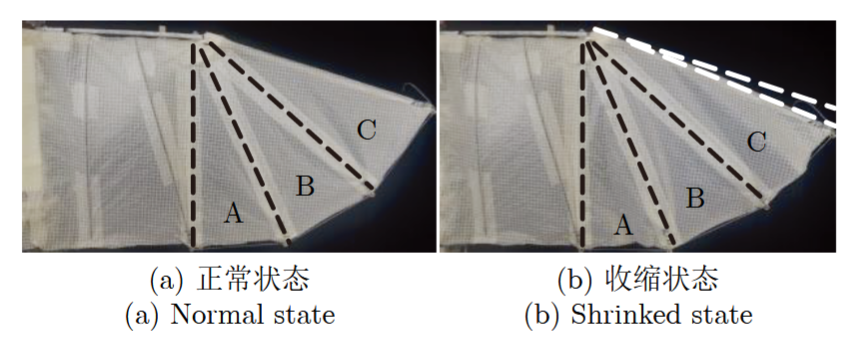
7. 扑翼张紧程度的调控(而非靠面积的变化)
细绳牵引主要导致了外段翅膀 A、C 部分面积 稍有减小, 而 B 部分面积基本不变.主要靠细绳牵引改变了扑动翅膀的柔性. 从图 15 可以看出, 对于 USTB-Dove 来说, 虽然面积的改变量相对整个右翅的比例很小, 约为 5%, 但是收缩导致了 A、C 部分两边碳杆间距减小, 使杆间薄膜由张紧平展状态变为了松弛卷曲状态, 从而减小了翅膀扑动产生的升推力, 使扑翼机器人产生向右的滚转和偏航力矩, 风洞测试统计 结果表明整体升推力最大衰减超过了 10%, 这样的 设计方案对于小翼展扑翼机器人来说更适用.
Paper3 Modeling and vibration control of the flapping-wing robotic aircraft with output constraint(2018,早期的)
简介
简介1:针对扑翼飞行器,提出boundary control for undesired vibrations suppression with output constraint。介绍了柔性翼的动力学,其governing equations是偏微分方程组,而boundary conditions是常微分方程组。
疑问1:什么是边界控制bondary control?什么是不期望的振动?什么是output constraint?
简介2:分析系统稳定性,靠的是energy-based barrier Lyapunov function。借助采用的boundary controller,系统的distributed states保持在constrained spaces. 然后,提出了IBLF-based boundary controls 来评估FWRA在有output constraint时的稳定性。
引言
发现扑翼系统在开环是不稳定的。现有的研究基于6自由度非线性模型,专注于扑翼的位置和和姿态控制,且主要关注insect-like micro aerial vehicles,可以用刚体模型的。
讲本研究对象和已有研究的不同之处,为何需要额外研究:仿鸟飞行器,翼展1-2m, 翼的柔性可能对飞行表现有重要的影响。然而,考虑到柔性的infinite dimensional states的特点, 是分布参数系统(DPS),由偏微分方程(PDE)描述,比刚体模型更难控制。 其建模和控制设计比传统的刚性翼要困难得多。此外,翼的柔性可能引起不期望的振动,可能导致气动特性的变化和不期望的动力学反应,进一步增加了分析FWMAV系统稳定性的难度。
似乎要对翼做结构动力学建模,而且似有成熟的方法:In this paper, we consider that the flexible wing has bending and torsion degrees of freedom. The dynamics of the flexible wing is a distributed parameter system (DPS) obtained by using Hamilton’s principle. It contains a second-order hyperbolic partial differential equation (PDE) for torsion movement, a fourth-order Euler-Bernoulli beam PDE for bending movement, and a set of ordinary differential equations (ODEs) for boundary conditions of the flexible wing aircraft system. Hence many control methods that aim at the conventional lumped parameter system (LPS) cannot be used for the DPS directly
- Boundary Control 在这篇文献中的准确定义
针对由偏微分方程(PDE)描述的柔性结构(分布参数系统),仅在系统的空间边界处(如机翼尖端)施加控制输入(力或力矩),以实现对整个系统空间域内的振动抑制、稳定性保证以及输出状态约束的一种控制策略。
- 动力学建模 (Dynamics Modeling)
- 方法: 使用 Hamilton 原理推导动力学方程。
- 模型构成:
- 弯曲运动: 四阶 Euler-Bernoulli 梁 PDE。
- 扭转运动: 二阶双曲 PDE。
- 边界条件: 一组常微分方程(ODE)。
- 干扰: 考虑了未知的时空分布干扰 Fb(x,t)Fb(x,t)。
- 变量: 表示弯曲变形, 表示扭转变形。
- 稳定性分析 (Stability Analysis)
- 方法: 使用 Lyapunov 直接法。
- 结论: 证明了闭环系统是一致最终有界(Uniformly Ultimate Bounded)的。
- 约束保证: 证明如果初始状态在约束范围内,系统状态将永远不会超出设定的约束边界(即不会发生约束 violation)
数值仿真 (Numerical Simulation)
- 方法: 有限差分法(Finite-difference method)。
- 设置: 给定机翼物理参数(表 1),初始变形及分布干扰 。
- 结果:无控制时:弯曲和扭转振动幅度大,且因外部干扰无法消除,可能导致机械损坏。有控制时: 振动被显著抑制,机翼尖端变形 和 被严格限制在约束范围内。
疑问
能说服读者翼的柔性有多重要吗?没有
能讲清楚翼柔性导致的不期望振动对气动特性的影响吗?没有
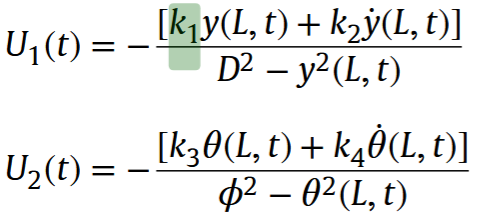
用什么控制量(control parameters),能对翼施加控制呢?答:we choose proper control parameters as k1 = 200, k2 = 5, k3 = 40, k4 = 0.01. The simulation of control inputs U1(t) and U2(t) as Fig. 5.
U1(t) and U2(t) 是boundary control inputs for bending and torsion deflections at the wing tip x = L
需要问清楚:U1, U2, k1, k2, k3, k4都是什么量,物理意义有吗。
从其他文献获得的线索:在施加在翼尖端的控制力F(t)影响下, bending deflection w(x, t) continues to decrease from the initial position,并在60s后保持在a small range around zero.
three control inputs including one control force and two control torques at boundaries are proposed for an axially moving string system to regulate both the longitudinal and transverse vibrations with velocity tracking.
文献4:There exist two boundary control inputs in the system dynamic equations (1)–(5), namely the shear force F(t) and the twisting moment M(t), which are generated by tipbased actuators.
文献6:
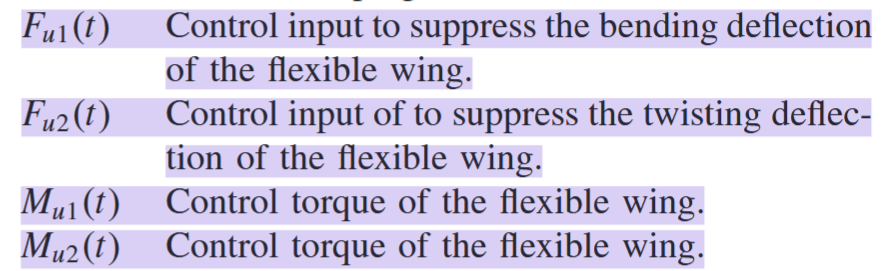
结论:U就是作用在机翼的尖端(Wing Tip)的控制力和控制力矩。k那些是控制增益,属于设计参数。在柔性机翼边界控制的研究中, 可能通过安装在翼尖的小型伺服舵机(Servo motors)、压电致动器(Piezoelectric actuators)或智能材料结构来实现。但在该篇特定文献中,作者没有指定具体使用哪种机构来产生,在飞行器设计中也没有这种机构,可以认为暂时没有实用价值。案例(但和翼没关系):文献[30]通过在顶端配置液压执行器(hydraulic actuators),采用边界控制器实现了对三维海洋立管系统(3-D marine riser system)的稳定控制。
结果和贡献
提出了控制律,实现同时抑制vibrations和实现output constraints. 使用直接Lyapunov方法证实了系统的稳定性。此外,采用Numerical simulations并选用适当的 control parameters来表明了control effectiveness, 得到的期望结果就是:vibrations of the flexible wing are suppressed, and boundary output constraints are guaranteed.(输出约束Output Constraint指的是机翼末端的变形不能超过特定范围,以保证结构耐久性和避免执行器损坏)。
本文的价值:为subsequent practical study 提供了 theoretical supports,并对试飞有所贡献。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 9
9 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)