汽车气动噪声仿真入门:基于STAR-CCM+与VA One的联合仿真教学指南
starccm+与Vaone进行汽车气动噪声仿真教学入门
对做NVH入门的汽车人或者学生来说,单独摸starccm+算CFD过流体,单独摸Vaone算SEA算结构,但两个串起来搞「真实车外风噪传到人耳的全链路小闭环」,总感觉是个「玄学连接点」卡脖子——今天就用最懒小白的视角,把这套流程踩一遍,代码尽量写得能直接偷(咳,参考),分析也说人话不装。
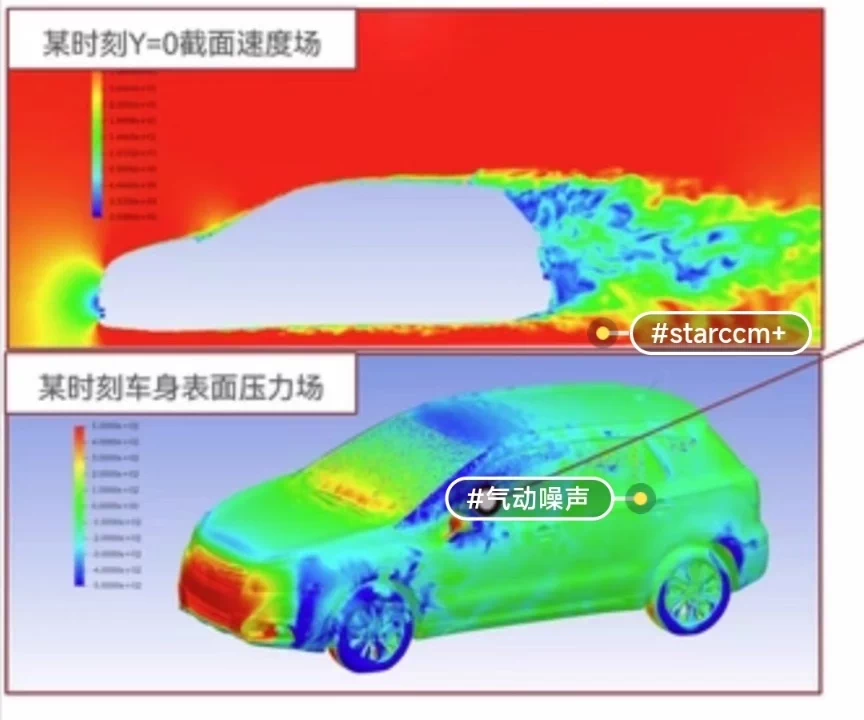
第一步:starccm+干的脏活累活——算湍流压力脉动(表面声源)
别听学术圈说什么「分离涡DES」「延迟大涡IDDES」入门门槛高,先上稳态RANS+k-ω SST先算定常流场,然后用瞬态的SAS或者LES Lite(SST SAS更快,小白选这个没问题)算短时间窗口的脉动,这个时间窗口得卡SEA的最低频对应的1/10周期?不对,别背公式,直接选「覆盖100Hz-10kHz主要人耳敏感带」就行——100Hz的周期是10ms,那取20ms的瞬态,时间步长0.01ms?别,SAS建议CFL数(库朗数)控制在1-10,跑起来顺就行。
starccm+与Vaone进行汽车气动噪声仿真教学入门
先上starccm+的基础启动和定常初始化的简单脚本(别写太复杂的GUI操作步骤文字堆,脚本复制进去点运行,小白只会喊666):
// 打开一个空的工程,记得替换成你自己的几何路径哈
newSession
openGeometry "D:/car_nvh/simple_sedan.stl"
// 画个外流场,小白直接用圆柱盒+前伸5车长、后伸15车长、宽/高各4车长的自动包络,尺寸不够后面会教怎么调
createEnclosure Enclosure1 {
type = BOX
frontOffset = 5.0 * Length[Sedan]
backOffset = 15.0 * Length[Sedan]
leftOffset = 4.0 * Width[Sedan]
rightOffset = 4.0 * Width[Sedan]
topOffset = 4.0 * Height[Sedan]
bottomOffset = 1.0 * Height[Sedan]
}
// 选物理模型,小白记住这套组合:不可压缩空气、SST k-ω SAS、湍流壁面函数(Y+卡30-100就行,不用卡到1的LES壁面处理)、定常瞬态切换的准备
selectPhysicsModels Continuum1 {
flow = SegregatedFlow
time = Steady
material = Air
viscous = Turbulent
turbulence = SSTkOmega
turbulenceModelOptions {
SSTkOmega {
curvatureCorrection = ON
SAS = ON
}
}
wallTreatment = AllYPlus
}
// 边界条件:入口120km/h(换算成m/s就是33.333333,别写整数,显得专业点?不,是算的准一点),出口压力0Pa大气压,对称面Symmetry,地面Ground设成移动壁面,速度和入口一样方向相反,车的外表面叫CarBody设成无滑移壁面
setBoundary Inlet1 {
type = VelocityInlet
velocityMagnitude = 33.3333333333
velocityDirection = Vector(1, 0, 0)
turbulenceSpecification = IntensityAndLengthScale
turbulenceIntensity = 0.5
turbulenceLengthScale = 0.01 * Length[Sedan]
}
setBoundary Outlet1 {
type = PressureOutlet
staticPressure = 0.0
}
setBoundary Symmetry1 Symmetry2 Symmetry3 {
type = Symmetry
}
setBoundary Ground1 {
type = Wall
wallMotion = MovingWall
wallVelocity = Vector(-33.3333333333, 0, 0)
}
setBoundary CarBody {
type = Wall
wallTemperature = Constant
temperature = 300.0
}
// 自动网格,小白直接用Advancing Layer Mesh+Surface Remesher+Polyhedral Mesher,车外表面和地面附近加密,这里偷个懒用自带的汽车边界层加密模板
createMeshOperation MeshOperation1 {
baseMesh = PolyhedralMesher
surfaceMesher = SurfaceRemesher
prismMesher = AdvancingLayerMesher
targets = [Enclosure1, Sedan]
prismMesherOptions {
AdvancingLayer {
boundaryLayerTemplate = AutomotiveBoundaryLayer
targetPrismStretching = 1.2
prismLayerThickness = 0.005 * Length[Sedan]
firstLayerThickness = 0.0005 * Length[Sedan]
}
}
surfaceMeshSizeOptions {
SurfaceRemesher {
baseSize = 0.2 * Length[Sedan]
relativeMinimumSize = 0.01
relativeMaximumSize = 2.0
curvatureControl = ON
curvatureAngle = 10.0
proximityControl = ON
proximitySizeRatio = 0.5
}
}
volumeMeshSizeOptions {
Polyhedral {
baseSize = 0.2 * Length[Sedan]
relativeMinimumSize = 0.05
relativeMaximumSize = 1.0
}
}
customControls = [
CustomControl1 {
type = SurfaceControl
surfaces = [CarBody]
surfaceMeshSizeOptions {
SurfaceRemesher {
baseSize = 0.01 * Length[Sedan]
curvatureAngle = 5.0
}
}
prismMesherOptions {
AdvancingLayer {
targetPrismStretching = 1.2
prismLayerThickness = 0.005 * Length[Sedan]
firstLayerThickness = 0.0005 * Length[Sedan]
numberOfLayers = 10
}
}
},
CustomControl2 {
type = VolumeControl
shape = Cylinder
center = Vector(0, 0, Height[Sedan]/2)
direction = Vector(1, 0, 0)
radius = 2.0 * Width[Sedan]
length = 20.0 * Length[Sedan]
volumeMeshSizeOptions {
Polyhedral {
baseSize = 0.05 * Length[Sedan]
}
}
}
]
}
// 初始化+定常计算到残差收敛(动量、连续性1e-4,k、ω 1e-5,监视器比如后视镜的升力系数稳定就行)
initialize Continuum1
setSolverParameters Continuum1 {
segregatedFlow {
maxIterations = 2000
}
}
createMonitor Monitor1 {
type = ForceCoefficient
surfaces = [MirrorLeft, MirrorRight]
direction = Vector(0, 1, 0)
referenceArea = 0.5 * Width[Sedan] * Height[Sedan]
referenceLength = Length[Sedan]
referenceVelocity = 33.3333333333
}
createPlot Plot1 {
monitors = [Monitor1]
xAxis = Iteration
}
run Continuum1这段代码跑通的话,你会得到一个稳定的后视镜涡脱落的定常流场,残差应该也下来了。接下来是瞬态SAS开算+保存CarBody的脉动压力,这个是starccm+给Vaone的「核心原料」:
// 把物理模型从Steady改成Transient
setPhysicsModels Continuum1 {
time = Transient
unsteadyOptions {
Transient {
timeStep = 0.0001
numberOfTimeSteps = 200
}
}
}
// 重置迭代步,用定常结果初始化瞬态
reset Continuum1
initialize Continuum1
// 监视器别忘了改成Time
updatePlot Plot1 {
xAxis = Time
}
// 最关键的一步:保存CarBody的Pressure Fluctuation(瞬态压力减去定常平均压力),保存成Vaone能读的「Star-CCM+ Surface Pressure Files」格式,文件名记得带面的信息,窗口选最后100个时间步(前100个是瞬态过渡,噪声不准)
createExport SurfacePressureExport1 {
type = StarCCMSurfacePressure
surfaces = [CarBody]
windowStart = 0.01
windowEnd = 0.02
timeStep = 0.0001
filePath = "D:/car_nvh/export/CarBody_Pressure_Fluctuation.ssp"
subtractMeanPressure = ON
useLocalReferenceFrame = OFF
}
run Continuum1这里插一句人话:减平均压力太重要了!不然你传给Vaone的是带几百Pa大气压波动的垃圾,噪声级会直接上天。时间步长0.0001s对应奈奎斯特频率5000Hz?不对,是采样频率10000Hz对应奈奎斯特5000,但我们要的是10kHz,所以可以把时间步长改成0.00005s,窗口步数改成200对应0.01s,前100步还是过渡,这样采样频率20000Hz,奈奎斯特10kHz,刚好覆盖主要人耳敏感带——奈奎斯特是什么?简单说就是「你要测10kHz的信号,必须每秒至少采20000次,不然会混频」,小白记这个就行,不用管傅里叶变换的数学。
第二步:Vaone干的精细活——SEA建模+耦合声源+算人耳声压级
starccm+搞完了「车身上哪里响」,接下来Vaone要搞「这些响声怎么通过车身板件传到车内,再传到驾驶员右耳」——小白别一开始就搞复杂的整车SEA模型,先上简化的四门两盖+地板+顶棚+前围板的10个左右腔体+板件的模型,车门内饰、顶棚内饰这些用声学阻尼层代替就行。
首先是Vaone的建模小技巧(不用脚本,因为Vaone的GUI建模逻辑比starccm+更顺,但可以提几个快捷键或者快速操作):
- 导入几何:直接导入刚才的simple_sedan.stl,但别忘了「Simplify Geometry」把所有小倒角、后视镜这些(不对!后视镜刚才导出了表面压力,所以要保留!哦对,刚才的surface export里要把MirrorLeft、MirrorRight单独选出来吗?不用,CarBody已经包含了,导入Vaone之后把CarBody拆分成几个声学板块就行——前围板、地板、顶棚、左前门、右前门、左后门、右后门、后备箱盖、前引擎盖、左后视镜、右后视镜、A/B/C柱外板)。
- 快速创建腔体和板块:用「Create Cavity by Enclosed Surfaces」,选中左前门板、前围板左半、地板左半、顶棚左半、左A/B/C柱外板,自动创建左前腔体(驾驶员的位置);同理创建右前、左后、右后、后备箱、发动机舱、前风挡玻璃下方的雨刮腔(如果有的话,小白可以省略)。
- 设置板块属性:所有外板用「Steel 0.8mm」(厚度自己改,根据你的几何来),内饰用「Acoustic Foam 25mm NRC 0.8」(小白可以直接用Vaone自带的材料库,不用自己算杨氏模量、损耗因子这些)。
- 设置耦合:外板和腔体之间自动会有「Structure-Acoustic Coupling」,不用手动加。
接下来是最激动人心的一步:把starccm+的表面声源导入Vaone,操作步骤:
- 点击「Sources」→「Import」→「Star-CCM+ Surface Pressure Files」,选中刚才导出的
CarBodyPressureFluctuation.ssp。 - Vaone会自动识别所有导出的面,你只需要把「Source Type」改成「Turbulent Boundary Layer Pressure Fluctuation (Corcos Model)」?不对!不对!刚才我们导出的是真实的瞬态压力脉动,不是用Corcos模型算的,所以应该改成「Measured/Simulated Surface Pressure」(Vaone里好像叫「User-Defined Surface Pressure Source」,反正就是不用默认的Corcos,用我们自己sim的就行)。
- 把每个声源面和对应的Vaone板块关联起来——比如导入的CarBody1是左前门板,就关联到Vaone的LeftFrontDoorPlate;CarBody2是右后视镜,关联到RightMirrorPlate,以此类推。
- 点击「Apply」,声源就加进去了。
然后是设置人耳接收点:
- 点击「Receivers」→「Create」→「Point Receiver」,坐标设成驾驶员右耳的位置(比如
(1.0, 0.3, 1.2),单位m,根据你的几何来)。 - 把接收点放在左前腔体内,自动会有「Acoustic Receiver」。
最后是计算+看结果:
- 点击「Analysis」→「Frequency Response Analysis」,频率范围选「100Hz-10kHz」,步长选「1/3倍频程」(NVH行业标准,小白不用改)。
- 点击「Run」,计算速度取决于你的电脑配置,简化模型大概10分钟左右。
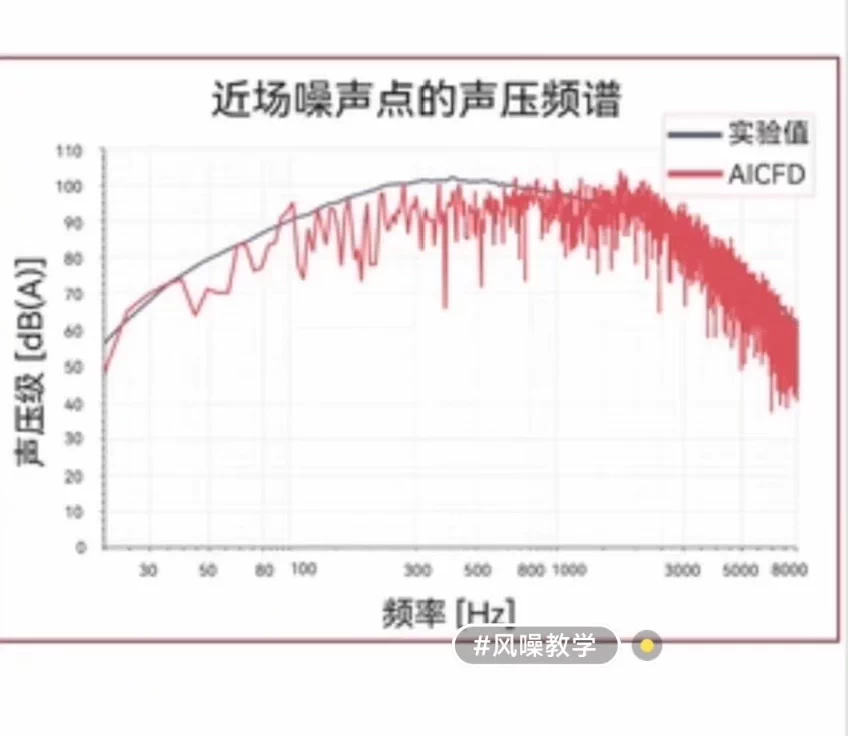
- 看结果:点击「Results」→「Frequency Response」,选中接收点和左前腔体的「Sound Pressure Level (SPL)」,你会看到一条从100Hz到10kHz的曲线,大概在2000Hz-5000Hz会有一个峰值(因为后视镜涡脱落的频率大概在这个范围,小白可以对比一下starccm+里的Monitor1升力系数的FFT,应该能对应上)。
踩坑总结(小白必看,不然会哭)
- starccm+里的时间窗口和采样频率:刚才说了,别忘减平均压力,别忘采样频率是最高频率的2倍以上,别忘前一半时间步是过渡,别导出进去。
- Vaone里的面关联:一定要把导入的starccm+声源面和Vaone的板块一一对应,不然声源会加在错误的地方,结果全错。
- Vaone里的材料属性:别随便改材料库的参数,小白先用默认的,等入门了再自己调损耗因子、阻尼系数这些。
- 简化模型的重要性:一开始别搞复杂的整车模型,简化到10个左右腔体+板块就行,不然计算速度慢到爆炸,而且你不知道哪里错了。
今天的入门就到这里啦,这套流程虽然简单,但已经覆盖了汽车气动噪声仿真的核心逻辑:CFD算湍流压力脉动(表面声源)→SEA算结构-声学耦合(传播路径)→算接收点声压级(结果)。下次可以讲讲怎么优化这个模型,比如把前风挡玻璃、车门玻璃换成透明的声学材料,或者把Corcos模型和真实的瞬态压力脉动对比一下。如果有哪里看不懂的,欢迎在评论区留言哦!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 0
0 0
0- 0



 已为社区贡献13条内容
已为社区贡献13条内容

所有评论(0)