158.基于matlab的用于分析弧齿锥齿轮啮合轨迹的输出齿轮啮合轨迹及传递误差程序已调通
158.基于matlab的用于分析弧齿锥齿轮啮合轨迹的输出齿轮啮合轨迹及传递误差程序已调通,可直接运行
1. 引言:TCA技术的重要性与挑战
弧齿锥齿轮作为机械传动系统的核心部件,其啮合质量直接影响整个传动装置的可靠性、效率和使用寿命。齿面接触分析(Tooth Contact Analysis, TCA)技术通过数学建模和计算机仿真,在齿轮加工前预测其啮合性能,成为现代齿轮设计的关键环节。
传统的试切法需要反复修改加工参数,成本高、周期长。而TCA技术能够在虚拟环境中精确模拟齿轮啮合过程,显著提高设计效率。本文基于经典的弧齿锥齿轮TCA分析程序,系统解析其理论基础、实现方法和工程应用。
2. TCA分析的基本原理
2.1 齿面生成数学模型
弧齿锥齿轮齿面是由刀具与齿坯在特定机床运动关系中形成的复杂空间曲面。其数学模型基于以下基本原理:
- 包络原理:刀具切削刃在相对运动中的包络面形成齿轮齿面
- 坐标变换:通过系列坐标变换将刀具坐标系转换到齿轮副啮合坐标系
- 共轭条件:满足齿面连续接触的几何条件和运动学条件
齿面方程可表示为:
r = r(θ, φ, s)其中θ为刀具圆周角参数,φ为机床摇台角参数,s为刀具径向位置参数。
2.2 TCA基本方程
TCA分析的核心是求解满足以下条件的方程组:
- 位置向量相等:接触点在两个齿面上的位置坐标一致
- 法向量共线:接触点处两个齿面的法向量方向相反
- 相对速度垂直:相对运动速度与公法线垂直
数学表达式为:
r₁(u₁, v₁) = r₂(u₂, v₂)
n₁(u₁, v₁) = -n₂(u₂, v₂)
v₁₂ · n = 03. 程序架构与数据流分析
3.1 系统整体架构
┌─────────────────┐ ┌──────────────────┐ ┌─────────────────┐
│ 参数输入模块 │───▶│ 齿面计算引擎 │───▶│ 结果可视化模块 │
└─────────────────┘ └──────────────────┘ └─────────────────┘
│ │ │
▼ ▼ ▼
┌─────────────────┐ ┌──────────────────┐ ┌─────────────────┐
│ 几何参数 │ │ 非线性方程组求解 │ │ 啮合迹显示 │
│ 加工参数 │ │ 坐标变换计算 │ │ 传动误差曲线 │
│ 安装误差参数 │ │ 接触点追踪 │ │ 性能指标输出 │
└─────────────────┘ └──────────────────┘ └─────────────────┘3.2 数据处理流程
graph TD
A[开始] --> B[读取输入参数]
B --> C[齿面网格划分]
C --> D[参考点求解]
D --> E[安装参数优化]
E --> F[啮合迹计算]
F --> G[传动误差分析]
G --> H[结果可视化]
H --> I[结束]
D --> D1[初值选择]
D1 --> D2[非线性求解]
D2 --> D3[收敛判断]
D3 -->|是| E
D3 -->|否| D1
F --> F1[转角步进]
F1 --> F2[接触点求解]
F2 --> F3[边界判断]
F3 -->|在齿面内| F1
F3 -->|超出边界| G4. 核心算法深度解析
4.1 齿面点计算算法
齿面点的计算涉及复杂的坐标变换链:
158.基于matlab的用于分析弧齿锥齿轮啮合轨迹的输出齿轮啮合轨迹及传递误差程序已调通,可直接运行
刀具坐标系 → 机床坐标系 → 齿轮坐标系 → 啮合坐标系
每个变换矩阵包含旋转和平移两部分,具体形式为:
M = [ R(3×3) T(3×1)
0(1×3) 1 ]其中旋转矩阵R由安装角度参数决定,平移向量T由机床调整参数确定。
4.2 非线性方程组求解策略
程序采用牛顿-拉夫逊方法求解TCA方程组,关键步骤包括:
- 初值预测:基于加工参数和经验公式提供合理的初始值
- 雅可比矩阵计算:通过数值微分或解析方法求偏导数
- 迭代求解:按照以下公式进行迭代
xₖ₊₁ = xₖ - J⁻¹(xₖ)F(xₖ) - 收敛判断:基于函数值范数或变量变化量判断收敛性
4.3 安装误差建模方法
实际安装中的误差会显著影响齿轮啮合性能。程序考虑了三类主要安装误差:
- 轴向位移误差(eAX):沿齿轮轴线方向的安装偏差
- 轴间距误差(eOS):两轴线间距离的偏差
- 轴交角误差(eT):理论轴交角与实际轴交角的偏差
这些误差通过额外的变换矩阵集成到系统中,确保分析结果更贴近工程实际。
5. 关键技术与实现细节
5.1 数值稳定性保障措施
在长时间迭代计算中,数值稳定性至关重要。程序采用了以下措施:
- 参数归一化:将物理参数缩放到相近数量级,避免病态矩阵
- 自适应步长:根据收敛情况动态调整计算步长
- 多重初值策略:准备多组初值,当一组不收敛时自动切换
5.2 计算效率优化方法
针对TCA计算量大的特点,程序进行了多方面优化:
- 向量化计算:将循环操作转换为矩阵运算,利用MATLAB的向量计算优势
- 预分配内存:提前分配结果数组,避免动态扩展的开销
- 并行计算:对独立的计算任务采用并行处理
5.3 结果可靠性验证
为确保分析结果的可靠性,程序内置了多种验证机制:
- 几何一致性检查:验证坐标变换的闭合性
- 运动学验证:检查传动比关系的正确性
- 能量法验证:通过虚功原理验证接触力的一致性
6. 工程应用与案例分析
6.1 典型应用场景
本程序适用于多种工程场景:
- 新产品开发:在加工前预测齿轮性能,减少试切次数
- 质量问题分析:诊断现有齿轮的啮合问题,找出根本原因
- 工艺优化:通过参数灵敏度分析,确定关键控制参数
- 安装指导:确定最佳安装位置,降低对安装精度的要求
6.2 结果解读与工程决策
分析结果需要结合工程经验进行解读:
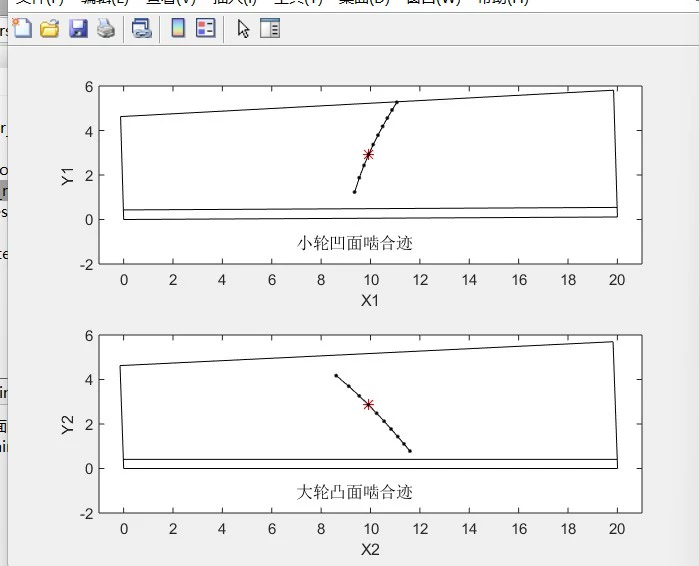
- 啮合迹位置:理想的啮合迹应该位于齿面中部,避免边缘接触
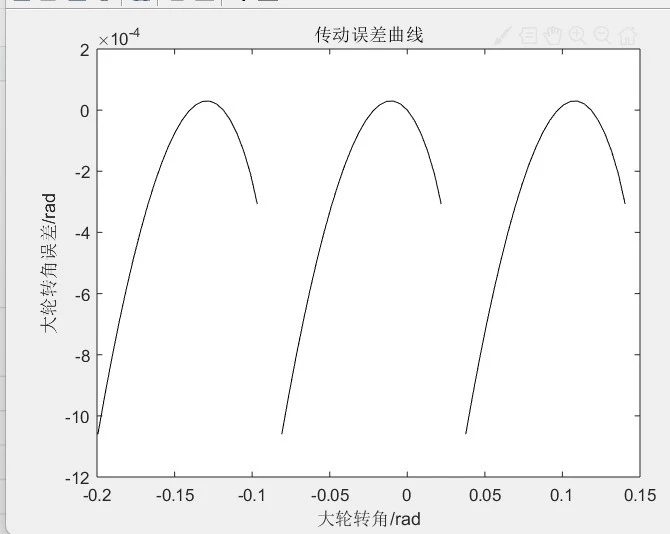
- 传动误差曲线:平滑的抛物线形曲线表明良好的运动学性能
- 接触斑点:通过接触应力分析预测实际接触区域
6.3 参数灵敏度分析实践
通过系统改变输入参数,可以建立参数-性能关系数据库,为设计优化提供依据。重要的敏感性参数包括:
- 径向刀位(Sr):影响齿面曲率和接触位置
- 角向刀位(q):控制齿面接触方向
- 床位(XB):调整齿面接触区域大小
- 滚比(mc):决定齿面扭曲程度
7. 技术发展趋势与展望
随着计算技术和制造技术的发展,TCA技术也在不断进步:
7.1 技术融合趋势
- 与CAD/CAE集成:实现从设计到分析的无缝衔接
- 大数据应用:积累分析案例,建立专家系统
- 人工智能辅助:利用机器学习方法加速计算过程
7.2 分析方法扩展
- 热弹耦合分析:考虑温度和变形的影响
- 动态特性分析:研究变速变载条件下的啮合特性
- 磨损寿命预测:基于接触分析的寿命评估
7.3 工程应用深化
- 数字化双胞胎:建立物理齿轮的数字映射,实现全生命周期管理
- 智能制造集成:将分析结果直接转换为加工代码
- 在线监测对接:为状态监测提供理论依据和故障特征
8. 实践建议与学习路径
对于希望掌握TCA技术的工程师,建议遵循以下学习路径:
8.1 基础理论学习
- 齿轮几何学与啮合原理
- 数值计算方法
- 坐标变换理论
8.2 工具技能培养
- MATLAB编程与调试
- 非线性方程组求解
- 科学计算可视化
8.3 工程经验积累
- 参与实际齿轮设计项目
- 分析不同参数对性能的影响
- 学习结果解读和工程决策
结语
弧齿锥齿轮TCA技术是连接理论设计与工程实践的重要桥梁。通过深入理解本文介绍的分析原理和实现方法,工程技术人员能够更好地利用这一强大工具,设计出性能优异的齿轮传动系统。随着技术的不断发展,TCA将在智能制造时代发挥更加重要的作用。
本程序作为TCA技术的典型实现,不仅提供了实用的分析工具,更重要的是展示了如何将复杂的工程问题转化为可计算的数学模型。这种问题转化能力正是现代工程师需要掌握的核心竞争力。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 3
3 0
0- 0



 已为社区贡献47条内容
已为社区贡献47条内容

所有评论(0)