V4L2 的 ioctl 调用流程
V4L2 的 ioctl 调用流程
在 Linux 音视频驱动开发中,V4L2 (Video for Linux 2) 框架是绕不开的核心。当你编写一个应用去设置摄像头的分辨率或格式时,背后究竟发生了什么?本文将以 VIDIOC_S_FMT ioctl 系统调用为例,深入剖析一条指令是如何穿透重重代码,最终到达底层物理硬件的 。
总体架构与调用链
整个过程的调用链可以用一条线串联起来:
App -> glibc -> vfs -> v4l2_core -> host_driver -> subdevice_driver -> i2c_bus -> hardware
为了实现高度的解耦和复用,Linux 引入了优秀的分层架构 :
- 系统调用接口 (SCI):负责从用户空间陷入进内核空间 。
- 虚拟文件系统 (VFS):提供统一的文件和设备操作视图,实现对具体设备驱动的解耦 。
- V4L2 核心框架:定义视频设备的标准行为和接口规范 。
- 设备驱动层 (Host & Subdevice):包含与特定 SoC 控制器和外部硬件(如 Sensor)交互的实现逻辑 。
- 总线系统层 (Bus System):抽象物理总线(如 I2C、SPI)的操作,为设备驱动提供通用 API 。
下面我们将分五个阶段详细拆解这个控制流 。
阶段一:系统调用与内核陷入
控制流始于用户空间的应用程序 。开发者填充 v4l2_format 结构体后,发起 ioctl 调用 :
// User Space (app.c)
struct v4l2_format fmt;
// ... 初始化 fmt 结构体 ...
int ret = ioctl(v4l2_fd, VIDIOC_S_FMT, &fmt);
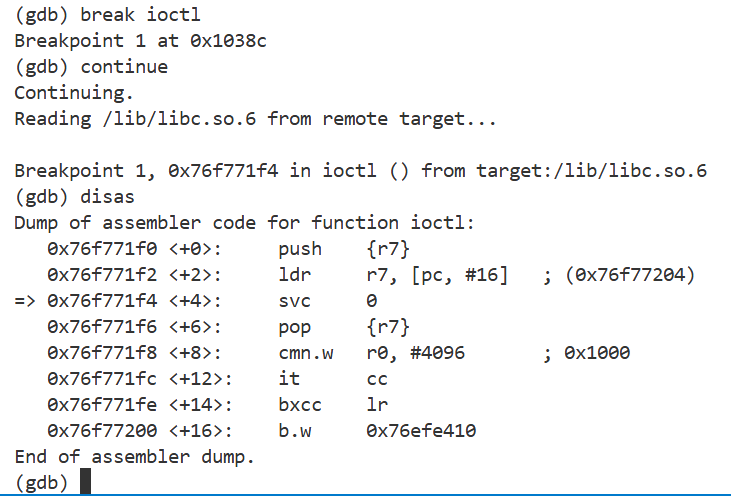
此时,Glibc 会将 ioctl() 函数封装为一段汇编代码 。它的核心任务是准备好寄存器(填入系统调用号、文件描述符等参数),然后发起 svc 0 (ARM 架构) 指令,触发 CPU 异常,完成从用户态到内核态的切换 。
进入内核后,CPU 跳转到预设的异常向量表,执行总入口函数 vector_swi 。该函数保存上下文后,在 sys_call_table 中根据中断号 54 查找到对应的 sys_ioctl 函数地址并跳转执行 。
/* ===============================================
* SWI handler
* --------------------------------------------------------------
*/
.align 5
ENTRY(vector_swi)
#ifdef CONFIG_CPU_V7M
v7m_exception_entry
#else
… …
adr tbl, sys_call_table @ 将系统调用表地址存入tbl(r8)寄存器中
… …
adr lr, BSYM(__sys_trace_return) @ 保留调用前用户空间内容至lr
… …
ldrcc pc, [tbl, scno, lsl #2] @ 将pc指到系统调用表的ioctl中断号(ioctl中断号存在scno(r7)寄存器)
call.S
… …
/* 50 */ CALL(sys_getegid16)
CALL(sys_acct)
CALL(sys_umount)
CALL(sys_ni_syscall) /* was sys_lock */
CALL(sys_ioctl) /* sys_ioctl为54号 */
/* 55 */ CALL(sys_fcntl)
阶段二:虚拟文件系统 (VFS) 分派
请求进入内核态后,首先由 VFS 统一接管 。
在 fs/ioctl.c 中,系统调用 sys_ioctl 会获取文件描述符对应的 struct file 实例,并调用 do_vfs_ioctl 。
// --- In fs/ioctl.c (VFS Layer) ---
SYSCALL_DEFINE3(ioctl, unsigned int, fd, unsigned int, cmd, unsigned long, arg)
{
// ...
struct file *filp = fdget(fd); // 1. Get file structure from fd
// ...
return do_vfs_ioctl(filp, fd, cmd, arg);
}
static long do_vfs_ioctl(struct file *filp, unsigned int fd, unsigned int cmd, unsigned long arg)
{
// ... permission checks ...
default:
if (S_ISREG(inode->i_mode))
error = file_ioctl(filp, cmd, arg);
else
error = vfs_ioctl(filp, cmd, arg);
break;
}
// ...
}
static long vfs_ioctl(struct file *filp, unsigned int cmd, unsigned long arg)
{
// ...
error = filp->f_op->unlocked_ioctl(filp, cmd, arg);
// ...
}
VFS 的核心枢纽是 struct file_operations 。do_vfs_ioctl 会通过 filp->f_op->unlocked_ioctl 这个函数指针,将控制权间接地转移给注册该操作集的具体驱动 。对于 /dev/videoX 设备,该指针指向的正是 V4L2 核心框架定义的 v4l2_ioctl 。
阶段三:V4L2 核心框架处理
此时,请求正式步入 V4L2 的领地 。V4L2 核心自身也存在多级分派机制 。
// --- In media/v4l2-dev.c ---
const struct file_operations v4l2_fops = {
.owner = THIS_MODULE,
.unlocked_ioctl = v4l2_ioctl,
// ... other operations
};
static long v4l2_ioctl(struct file *file, unsigned int cmd, unsigned long arg)
{
struct video_device *vdev = video_devdata(file);
// ... locking and common checks ...
// Further dispatch to the command-specific handler
return vdev->fops->unlocked_ioctl(file, cmd, arg);
}
// --- In media/platform/mxc/subdev/mx6s_capture.c ---
static struct v4l2_file_operations mx6s_csi_fops = {
// ... other operations
.unlocked_ioctl = video_ioctl2, /* V4L2 ioctl handler */
};
// --- In media/v4l2-ioctl.c ---
long video_ioctl2(struct file *file, unsigned int cmd, unsigned long arg)
{
return video_usercopy(file, cmd, arg, __video_do_ioctl);
}
long video_usercopy(struct file *file, unsigned int cmd, unsigned long arg,
v4l2_kioctl func)
{
// ...
if (v4l2_is_known_ioctl(cmd)) {
// ...
}
// ...
copy_from_user(parg, (void __user *)arg, n)
// ...
copy_to_user(user_ptr, mbuf, array_size)
}
static long __video_do_ioctl(struct file *file,
unsigned int cmd, void *arg)
{
// ...
if (v4l2_is_known_ioctl(cmd)){
info = &v4l2_ioctls[_IOC_NR(cmd)];
// ...
}
}
static struct v4l2_ioctl_info v4l2_ioctls[] = {
// ...
IOCTL_INFO_FNC(VIDIOC_S_FMT, v4l_s_fmt, v4l_print_format, INFO_FL_PRIO),
// ...
}
static int v4l_s_fmt(const struct v4l2_ioctl_ops *ops,
struct file *file, void *fh, void *arg)
{
struct v4l2_format *p = arg;
struct video_device *vfd = video_devdata(file);
// ...
switch (p->type) {
case V4L2_BUF_TYPE_VIDEO_CAPTURE:
// ...
ret = ops->vidioc_s_fmt_vid_cap(file, fh, arg);
// ...
}
}
- 一级流转:
v4l2_ioctl在进行通用性检查后,通过video_device结构体中的fops指针,将调用转移至video_ioctl2。 - 命令解析:
video_ioctl2是 V4L2 的命令解析中心 。它利用__video_do_ioctl内部的查找表v4l2_ioctls,根据VIDIOC_S_FMT命令码精确定位到对应的处理函数v4l_s_fmt。 - 回调底层:最终,框架代码会调用
v4l2_ioctl_ops结构体中由具体设备驱动注册的回调函数vidioc_s_fmt_vid_cap。控制权由此从通用框架转移至专用驱动 。
阶段四:专用驱动实现 (Host & Subdevice)
在专用硬件驱动层,现代 Linux 内核通常采用 Host + Subdevice 的架构设计 。
以 NXP I.MX 系列的 mx6s_capture.c 为例,它作为主机驱动,负责控制 SoC 内部的 CSI 控制器 。当它接收到 vidioc_s_fmt_vid_cap 调用时,它清楚自己并不掌握外部 Sensor 的细节 。
// --- In drivers/.../mx6s_capture.c (Host Driver) ---
static const struct v4l2_ioctl_ops mx6s_csi_ioctl_ops = {
.vidioc_s_fmt_vid_cap = mx6s_vidioc_s_fmt_vid_cap,
// ... other callbacks
};
static int mx6s_vidioc_s_fmt_vid_cap(struct file *file, void *priv, struct v4l2_format *f)
{
struct mx6s_csi_dev *csi_dev = video_drvdata(file);
// This driver controls the SoC's Camera Serial Interface (CSI)
// It needs to configure the sensor first.
// ...
// Using the subdevice framework to call the sensor driver
ret = mx6s_vidioc_try_fmt_vid_cap(file, csi_dev, f);
}
static int mx6s_vidioc_try_fmt_vid_cap(struct file *file, void *priv,
struct v4l2_format *f)
{
struct mx6s_csi_dev *csi_dev = video_drvdata(file);
struct v4l2_subdev *sd = csi_dev->sd;
struct v4l2_pix_format *pix = &f->fmt.pix;
struct v4l2_mbus_framefmt mbus_fmt;
struct mx6s_fmt *fmt;
fmt = format_by_fourcc(f->fmt.pix.pixelformat);
// ...
v4l2_fill_mbus_format(&mbus_fmt, pix, fmt->mbus_code);
ret = v4l2_subdev_call(sd, video, s_mbus_fmt, &mbus_fmt);
v4l2_fill_pix_format(pix, &mbus_fmt);
}
// --- In …/media/v4l2-subdev.h (Host Driver) ---
/* Call an ops of a v4l2_subdev, doing the right checks against
NULL pointers.
Example: err = v4l2_subdev_call(sd, video, s_std, norm);
*/
#define v4l2_subdev_call(sd, o, f, args...) \
(!(sd) ? -ENODEV : (((sd)->ops->o && (sd)->ops->o->f) ? \
(sd)->ops->o->f((sd) , ##args) : -ENOIOCTLCMD))
// --- In drivers/.../ov5640.c (Subdevice Driver) ---
static struct v4l2_subdev_video_ops ov5640_subdev_video_ops = {
.g_parm = ov5640_g_parm,
.s_parm = ov5640_s_parm,
.s_mbus_fmt = ov5640_s_fmt,
.g_mbus_fmt = ov5640_g_fmt,
.try_mbus_fmt = ov5640_try_fmt,
.enum_mbus_fmt = ov5640_enum_fmt,
};
static int ov5640_s_fmt(struct v4l2_subdev *sd, struct v4l2_mbus_framefmt *mf)
{
struct i2c_client *client = v4l2_get_subdevdata(sd);
struct ov5640 *sensor = to_ov5640(client);
const struct ov5640_datafmt *fmt = NULL;
// ...
/* Determine and modify user Settings */
// ...
/* The configuration register sets the pixel format */
ret = ov5640_set_framefmt(mf);
/* Verifies whether the user - specified video frame size is supported */
for (i = 0; i < ov5640_mode_MAX + 1; i++) {
if ((ov5640_mode_info_data[cur_rate][i].width == mf->width) &&
(ov5640_mode_info_data[cur_rate][i].height == mf->height)) {
cur_mode = i;
break;
}
} /* If the video frame size specified by the user is not supported, it defaults to the size set last time */
ret = ov5640_change_mode(cur_rate, cur_mode);
// ...
}
为了解耦,主机驱动会通过 V4L2 的 v4l2_subdev_call 宏,跨层调用挂载在其下的子设备驱动(如 OV5640 摄像头传感器)的 s_mbus_fmt 操作 。
// Host Driver (mx6s_capture.c)
ret = v4l2_subdev_call(sd, video, s_mbus_fmt, &mbus_fmt);
子设备驱动 ov5640.c 实现了上述的 s_mbus_fmt 回调(对应的具体函数为 ov5640_s_fmt) 。在这里,用户期望的视频帧格式将被真正解析,并转化为特定传感器芯片的寄存器配置逻辑 。
阶段五:总线抽象与硬件交互
最后一步是将配置数据真正写入到物理芯片中 。
在解析完分辨率、帧率、色彩格式等参数后,子设备驱动需要操作硬件寄存器 。为了保持驱动的可移植性,ov5640.c 绝对不会直接去操作 I2C 控制器的底层物理地址 。
相反,它会调用 Linux 内核 I2C 子系统提供的通用 API,例如 i2c_master_send 或 i2c_smbus_write_byte_data :
// Subdevice Driver (ov5640.c)
static s32 ov5640_write_reg(u16 reg, u8 val)
{
// ...
if (i2c_master_send(ov5640_data.i2c_client, au8Buf, 3) < 0) {
// ...
}
}
至此,数据顺利通过 I2C 总线发送到了硬件 Sensor,一次完整的 VIDIOC_S_FMT ioctl 调用才算真正画上句号。
总结
通过追踪 VIDIOC_S_FMT,我们可以看到 Linux 内核中 VFS 层、V4L2 框架层、主机驱动与子设备分离架构,以及总线模型的经典配合。这种高度抽象的设计虽然增加了代码的调用深度,但换来的是极佳的代码复用性和系统稳定性。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 13
13 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)