基于扩展卡尔曼观测器的无模型预测电流控制:仿真探索
基于扩展卡尔曼观测器的无模型预测电流控制 仿真中包含普基于ESO,与EKF两个观测器,可自行切换对比
在电力电子和电机控制领域,精确的电流控制是实现高效、稳定运行的关键。基于扩展卡尔曼观测器(EKF)的无模型预测电流控制方法近年来备受关注,它为复杂系统中的电流控制提供了一种强大且灵活的解决方案。
仿真框架:ESO与EKF观测器的切换对比
本次仿真搭建了一个有趣的平台,其中包含基于扩张状态观测器(ESO)和扩展卡尔曼观测器(EKF)的两种观测机制,我们可以轻松在两者之间切换,对比它们在无模型预测电流控制中的表现。
EKF观测器原理简介
扩展卡尔曼滤波器是一种对非线性系统进行状态估计的常用方法。它基于线性卡尔曼滤波器,通过对非线性函数进行一阶泰勒展开近似线性化,从而实现对非线性系统状态的递推估计。
在电流控制场景下,假设系统状态方程为:
\[ x{k + 1} = f(xk, uk) + wk \]
其中 \( xk \) 是 \( k \) 时刻的系统状态, \( uk \) 是输入, \( w_k \) 是过程噪声。观测方程为:
基于扩展卡尔曼观测器的无模型预测电流控制 仿真中包含普基于ESO,与EKF两个观测器,可自行切换对比
\[ yk = h(xk) + v_k \]
\( yk \) 是观测值, \( vk \) 是观测噪声。
EKF实现代码片段及分析
以下是一段简化的EKF实现代码(以Python为例,假设使用numpy库):
import numpy as np
def ekf_predict(x, P, A, Q, B, u):
# 预测步骤
x = A.dot(x) + B.dot(u)
P = A.dot(P).dot(A.T) + Q
return x, P
def ekf_update(x, P, y, H, R):
# 更新步骤
y_pred = H.dot(x)
S = H.dot(P).dot(H.T) + R
K = P.dot(H.T).dot(np.linalg.inv(S))
x = x + K.dot(y - y_pred)
P = (np.eye(len(x)) - K.dot(H)).dot(P)
return x, P
在 ekf_predict 函数中,我们根据系统状态转移矩阵 \( A \)、控制输入矩阵 \( B \) 和输入 \( u \) 对系统状态 \( x \) 进行预测更新,同时考虑过程噪声协方差矩阵 \( Q \) 更新状态协方差矩阵 \( P \) 。
ekfupdate 函数则是利用观测值 \( y \) 来校正预测状态。通过计算卡尔曼增益 \( K \),结合预测观测值 \( ypred \) 和实际观测值 \( y \) 的差异,对状态 \( x \) 和协方差矩阵 \( P \) 进行更新。
ESO观测器原理简介
扩张状态观测器(ESO)的核心思想是将系统中的未知动态(包括外部扰动和未建模动态)扩张为新的状态变量,然后一起进行观测估计。它不依赖于系统精确的数学模型,在一定程度上具有更好的鲁棒性。
无模型预测电流控制结合观测器
将EKF或ESO观测器与无模型预测电流控制相结合时,观测器负责估计系统状态(如电流状态),预测控制算法则根据这些估计状态来计算下一时刻的控制输入,以实现期望的电流跟踪。
仿真对比的意义与收获
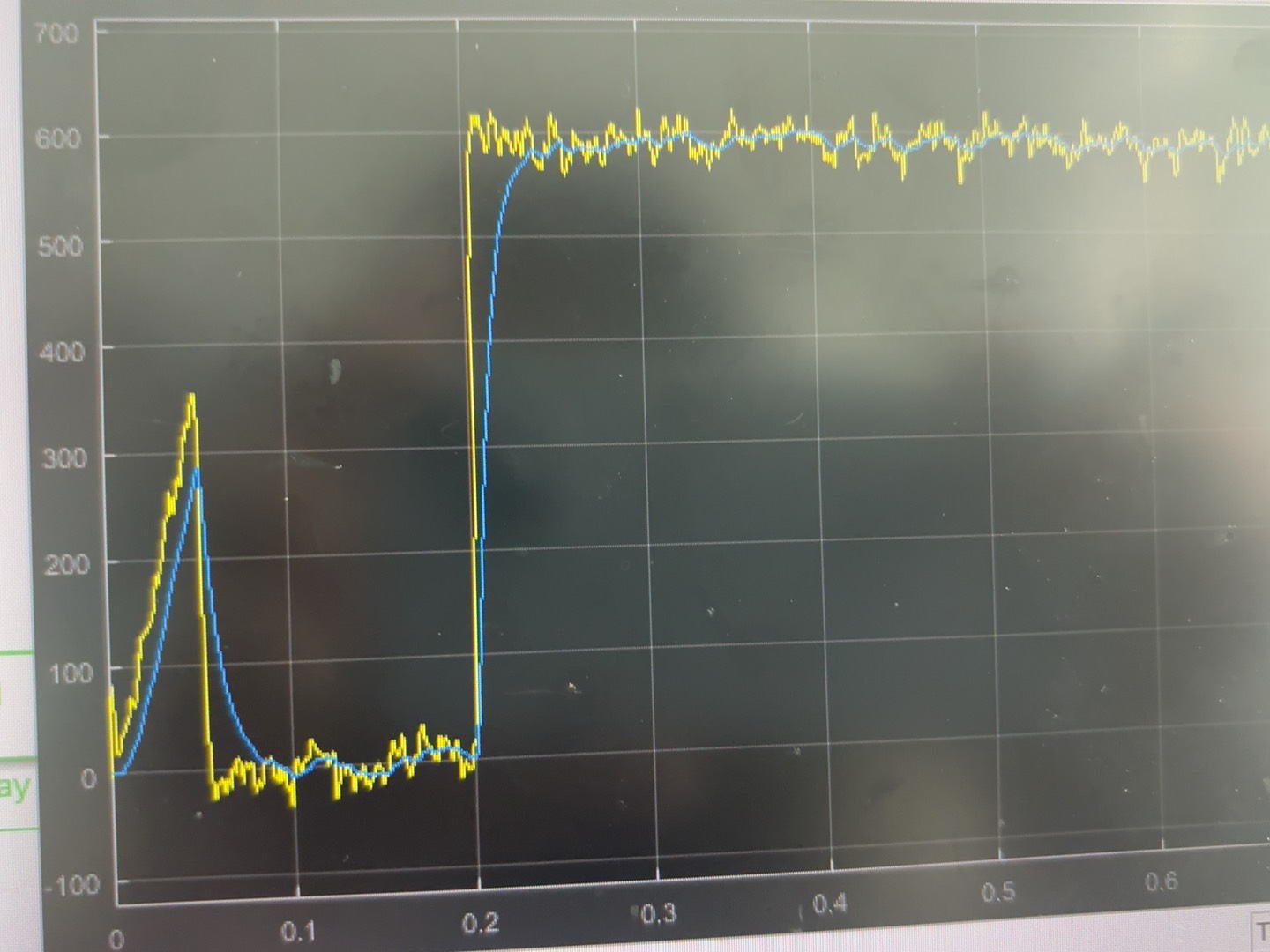
通过在仿真中自由切换ESO和EKF观测器,我们能够直观地对比两者在不同工况下的性能,比如在噪声环境中的抗干扰能力,动态响应速度以及稳态精度等方面。这种对比为实际工程应用中观测器的选择提供了有力的依据,帮助我们根据具体需求挑选最合适的观测器,优化无模型预测电流控制策略,提升系统整体性能。
在实际的电机驱动系统或者电力变换器控制中,这种基于不同观测器的无模型预测电流控制方法有望为提高系统效率、降低损耗以及增强可靠性开辟新的途径。
总之,本次仿真中的ESO和EKF观测器切换对比为深入理解和优化无模型预测电流控制提供了丰富的研究素材和实践经验。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 1
1 0
0- 0



 已为社区贡献11条内容
已为社区贡献11条内容

所有评论(0)