基于 CarSim 与 Simulink 联合仿真的车辆换道轨迹规划与跟踪之旅
基于carsim与Simulink联合仿真的车辆换道轨迹规划与轨迹跟踪模型 具体内容包括: 1. cpar文件和simulink文件,并有联合仿真步骤的演示操作视频 2. carsim+simulink联合仿真实实现换道超车,包含换道决策,路径规划和轨迹跟踪,有直道和弯道超车两种。 3. 包含路径规划算法+mpc轨迹跟踪算法可以适用于弯道道路,弯道车道保持,弯道变道86 4. carsim内规划轨迹可视化,道路环境可以自定义,资料包里面有视频教学和算法讲解。
嘿,各位技术宅们!今天咱来聊聊超酷炫的基于 CarSim 与 Simulink 联合仿真的车辆换道轨迹规划与轨迹跟踪模型。这玩意儿在自动驾驶领域那可是相当重要的一环,话不多说,直接开整。
一、文件与演示
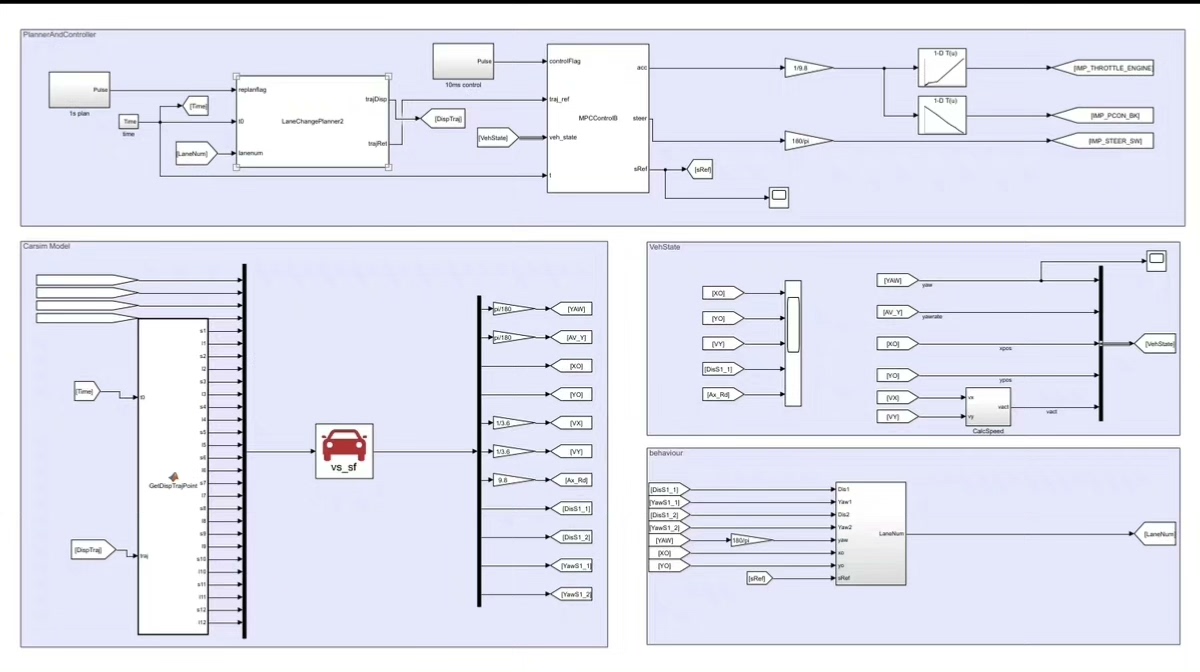
咱手头有 cpar 文件和 simulink 文件,这俩可是联合仿真的关键。cpar 文件是 CarSim 模型的参数文件,它定义了车辆的各种特性,从车身质量到轮胎摩擦系数,都在里面设定好啦。而 Simulink 文件则是搭建控制算法的舞台,咱们要在这儿施展路径规划和轨迹跟踪的魔法。

关于联合仿真步骤,我贴心地准备了演示操作视频。从打开 CarSim 和 Simulink 软件,到导入 cpar 文件,再到在 Simulink 里搭建与 CarSim 的接口,一步一步清清楚楚。就像这样,在 Simulink 里,你得通过特定的模块(比如 S-Function 模块)来与 CarSim 进行数据交互,下面简单给段伪代码示意:
function [sys,x0,str,ts] = s_function(t,x,u,flag)
switch flag,
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
case 1,
sys=mdlDerivatives(t,x,u);
case 2,
sys=mdlUpdate(t,x,u);
case 3,
sys=mdlOutputs(t,x,u);
case 4,
sys=mdlGetTimeOfNextVarHit(t,x,u);
case 9,
sys=mdlTerminate(t,x,u);
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
end
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 2; % 这里输出两个变量,比如车速和转向角
sizes.NumInputs = 2; % 输入两个变量,例如目标车速和目标转向角
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [];
str = [];
ts = [0 0];
end
function sys=mdlOutputs(t,x,u)
sys(1) = u(1); % 简单返回输入的目标车速
sys(2) = u(2); % 简单返回输入的目标转向角
end这段代码就是一个简单的 S - Function 框架,实际应用中你得根据 CarSim 和 Simulink 的数据交互需求去填充具体内容,比如如何从 CarSim 获取车辆当前状态,又如何把计算好的控制指令发给 CarSim 。
二、换道超车大揭秘
咱们这个联合仿真可实现超实用的换道超车功能,包含换道决策、路径规划和轨迹跟踪。而且,直道和弯道超车都不在话下。
在换道决策部分,得根据车辆周围的环境信息来判断是否可以换道。比如说,检测前后方车辆的距离、速度等信息。这部分代码逻辑可以是这样:
def lane_change_decision(self, front_distance, rear_distance, front_speed, rear_speed):
safety_distance = 10 # 设定安全距离
if front_distance > safety_distance and rear_distance > safety_distance:
if self.current_speed > front_speed or self.current_speed < rear_speed:
return True # 满足条件,可以换道
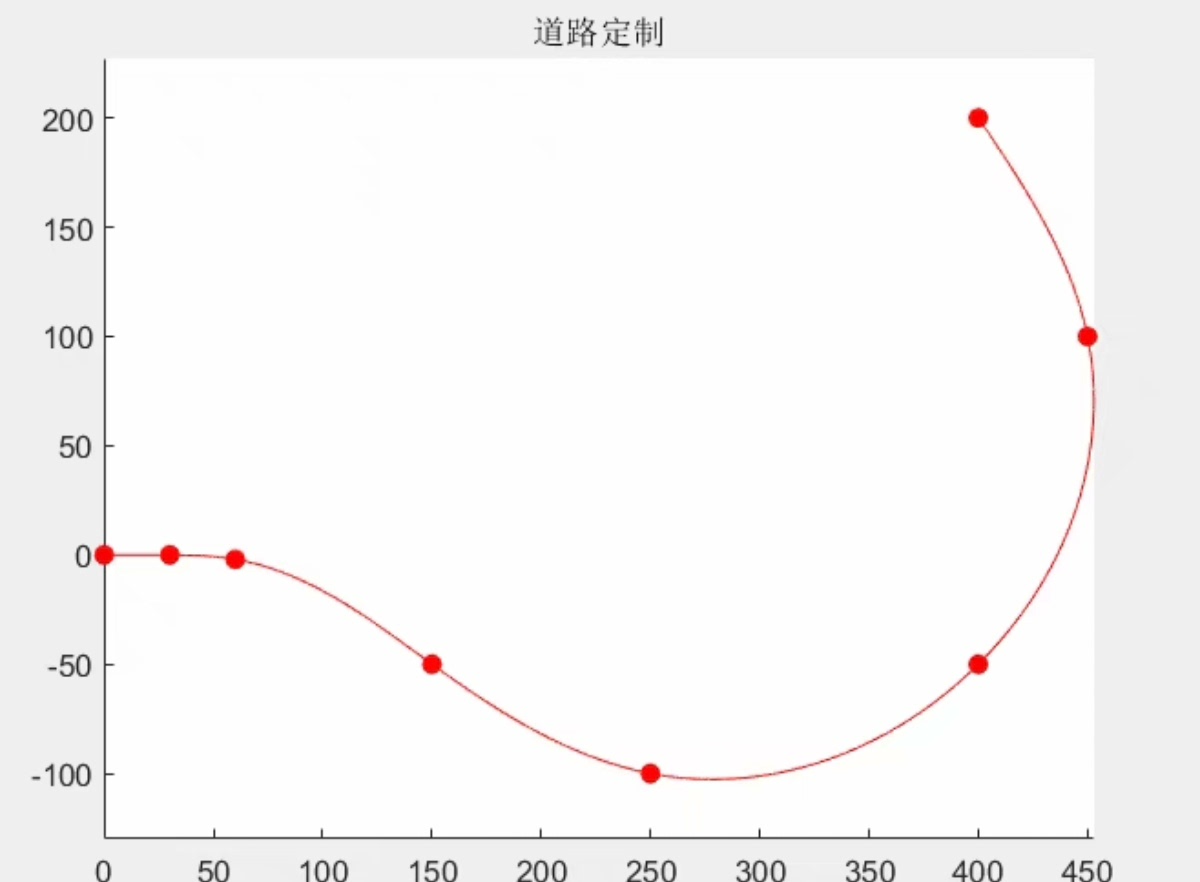
return False # 不满足条件,不能换道路径规划这块,对于直道超车相对简单,就是规划一条平滑的侧向位移曲线,让车辆从当前车道过渡到目标车道。而弯道超车就复杂些啦,得考虑弯道的曲率。咱们使用的路径规划算法会根据弯道半径、车辆当前位置和目标位置来生成合适的轨迹。代码里可能会像这样计算轨迹点:
% 假设已知弯道半径 R,车辆起始位置 start_x, start_y
R = 50; % 弯道半径
start_x = 0;
start_y = 0;
theta = 0:0.01:pi/2; % 角度范围,假设弯道是 90 度
x = R * sin(theta) + start_x;
y = R * (1 - cos(theta)) + start_y;这段代码简单生成了一段弯道上的轨迹点,实际应用中还得结合车辆动力学等因素进行优化。
基于carsim与Simulink联合仿真的车辆换道轨迹规划与轨迹跟踪模型 具体内容包括: 1. cpar文件和simulink文件,并有联合仿真步骤的演示操作视频 2. carsim+simulink联合仿真实实现换道超车,包含换道决策,路径规划和轨迹跟踪,有直道和弯道超车两种。 3. 包含路径规划算法+mpc轨迹跟踪算法可以适用于弯道道路,弯道车道保持,弯道变道86 4. carsim内规划轨迹可视化,道路环境可以自定义,资料包里面有视频教学和算法讲解。
轨迹跟踪环节,咱们采用 mpc 轨迹跟踪算法,这算法在弯道道路上表现超棒,不管是弯道车道保持还是弯道变道都能轻松应对。MPC 算法通过预测车辆未来的状态,并根据目标轨迹不断调整控制输入(比如转向角和加速度),让车辆尽可能沿着规划好的轨迹行驶。
三、可视化与自定义
在 CarSim 内,规划轨迹可以实现可视化,这可太方便调试和观察啦。你能清楚看到车辆是不是按照咱们规划的轨迹在跑。而且道路环境还能自定义,无论是不同曲率的弯道,还是各种坡度的路面,都能随心设置。
资料包里面有超详细的视频教学和算法讲解,从基础原理到实际操作,一步步带你吃透这个联合仿真模型。无论是新手小白想入门,还是老司机想进一步优化,都能从中找到有用的东西。
总之,基于 CarSim 与 Simulink 的联合仿真为车辆换道轨迹规划与跟踪提供了一个强大的平台,希望大家都能在这个领域玩出自己的花样,搞出更厉害的成果!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 7
7 0
0- 0



 已为社区贡献29条内容
已为社区贡献29条内容

所有评论(0)