永磁同步电机电流环控制:STSMC、MPC 与 PI 的三合一仿真探索
永磁同步电机基于二阶滑模控制电流环(STSMC) 和模型预测控制(MPC)电流环以及基于PI控制电流环三合一模型 的永磁同步电机双闭环仿真模型全新 支持 下图分别为D轴电流与电磁转矩对比 参考资料
在永磁同步电机(PMSM)的控制领域,电流环的精确控制对于电机性能至关重要。今天咱就聊聊基于二阶滑模控制电流环(STSMC)、模型预测控制(MPC)电流环以及基于 PI 控制电流环三合一模型构建的永磁同步电机双闭环仿真模型。
一、PI 控制电流环
PI 控制算是电机控制里的老面孔了,结构简单且容易实现。它的控制律公式如下:
% 假设误差e为期望电流与实际电流之差
Kp = 0.5; % 比例系数
Ki = 0.1; % 积分系数
e = i_ref - i_actual;
integral = integral + e * dt; % dt 为采样时间
u = Kp * e + Ki * integral; % u 为控制输出在这段简单代码里,Kp 和 Ki 分别是比例和积分系数,通过调整这俩值,可以让系统在响应速度和稳态精度上找到平衡。e 是电流误差,integral 则对误差进行积累,最终控制输出 u 就是比例项和积分项之和。PI 控制能在很多场景下把电流控制得不错,但面对复杂工况或者系统参数变化时,性能就可能打折扣。
二、二阶滑模控制电流环(STSMC)
滑模控制以鲁棒性强闻名,二阶滑模更是在传统滑模基础上优化,削弱了抖振问题。下面来段简单的概念性代码:
% 定义滑模面和相关参数
lambda = 10; % 滑模面系数
alpha = 5; % 控制律系数
s = lambda * (i_ref - i_actual) + diff(i_ref - i_actual); % 滑模面函数
if abs(s) > 0.01 % 抖振边界层
u = -alpha * sign(s); % 控制律
else
u = 0;
end这里 s 是定义的滑模面函数,它综合了电流误差及其变化率。当 s 超出一定边界层,就按照控制律 u = -alpha * sign(s) 来调整控制量,驱使系统状态向滑模面运动。alpha 决定了趋近滑模面的速度,lambda 影响滑模面形状,二阶滑模控制就是通过巧妙设计滑模面和控制律,让系统在面对参数摄动和外部干扰时,还能保持较好性能。
三、模型预测控制(MPC)电流环
MPC 控制思路很有趣,它基于系统模型预测未来状态,通过优化目标函数来确定当前最优控制量。假设有简单离散模型预测代码:
% 假设系统离散模型为 x(k+1) = A * x(k) + B * u(k)
A = [1 0.1; 0 1]; % 状态转移矩阵
B = [0.01; 0.1]; % 控制输入矩阵
x = [i_actual; diff(i_actual)]; % 当前状态
Np = 5; % 预测时域
Nu = 3; % 控制时域
Q = [1 0; 0 1]; % 状态权重矩阵
R = 0.1; % 控制输入权重矩阵
for k = 1:Np
% 预测状态
x_pred(:,k) = A * x + B * u_pred(:,k);
% 计算目标函数
cost = cost + (x_ref - x_pred(:,k))' * Q * (x_ref - x_pred(:,k)) + u_pred(:,k)' * R * u_pred(:,k);
end
% 求解最优控制量
[u_optimal] = fmincon(@(u) calculate_cost(u, A, B, x, x_ref, Q, R, Np, Nu), zeros(Nu,1), [], [], [], [], [], []);
u = u_optimal(1); % 取第一个控制量作为当前控制输出在这代码里,通过状态转移矩阵 A 和控制输入矩阵 B 预测未来状态 xpred。预测时域 Np 和控制时域 Nu 决定了预测和控制的范围。Q 和 R 分别是状态和控制输入的权重矩阵,通过最小化目标函数 cost 来求解最优控制量 uoptimal,这里只取第一个控制量 u 作为当前输出。MPC 能在多目标优化和约束处理上展现优势,但计算量相对较大。
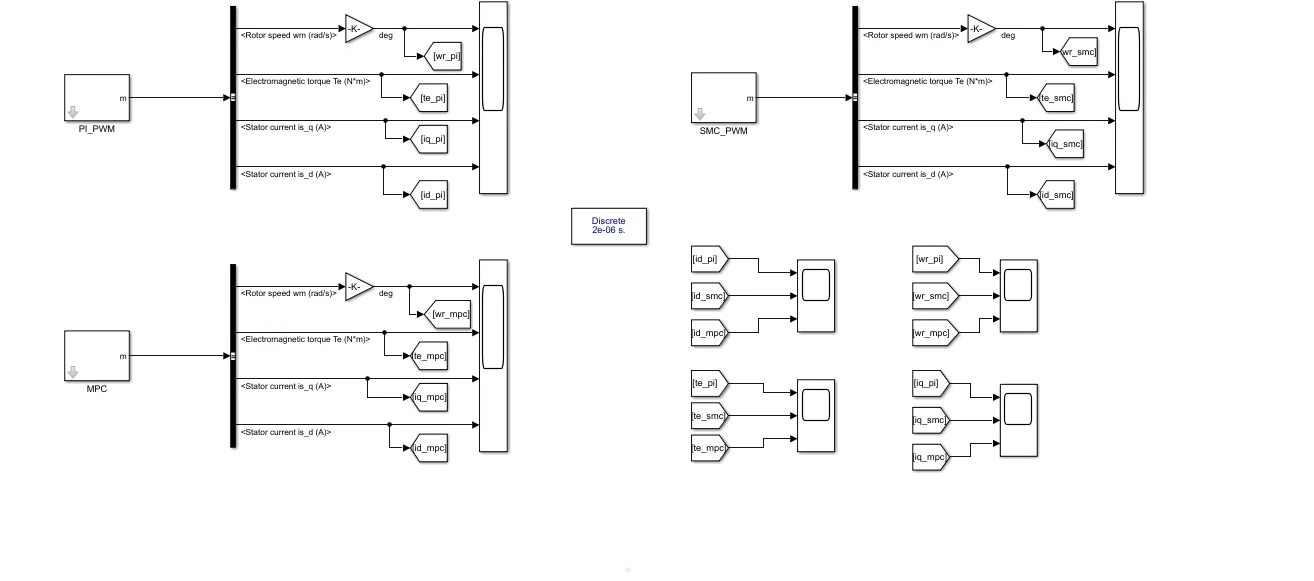
四、三合一模型与双闭环仿真
把这三种电流环控制方式集成到永磁同步电机双闭环仿真模型里,能综合利用各自优点。速度环可以采用传统 PI 控制,而电流环根据不同工况灵活切换这三种控制方式。比如在启动阶段,对响应速度要求高,可以用 MPC 快速追踪电流;在稳态运行时,PI 控制就能满足精度需求;而当电机受到较大干扰,STSMC 的鲁棒性就派上用场了。
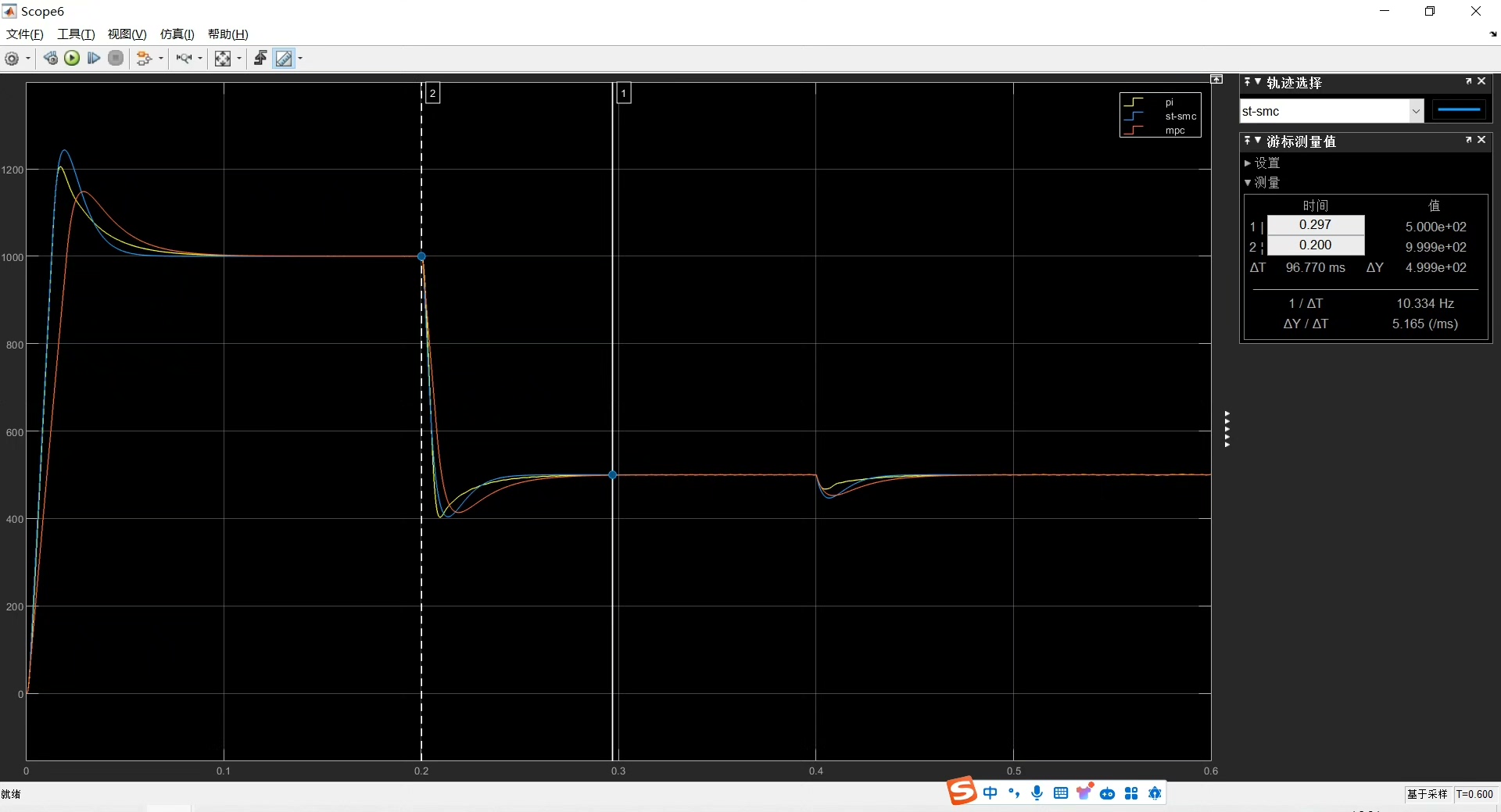
永磁同步电机基于二阶滑模控制电流环(STSMC) 和模型预测控制(MPC)电流环以及基于PI控制电流环三合一模型 的永磁同步电机双闭环仿真模型全新 支持 下图分别为D轴电流与电磁转矩对比 参考资料
从下图的 D 轴电流与电磁转矩对比能直观看到不同控制方式的特点。PI 控制下曲线相对平稳但调整时间可能较长;STSMC 控制在干扰出现时能迅速稳定转矩;MPC 则能在不同工况切换时快速响应并优化性能。通过这样的三合一模型和双闭环仿真,可以为永磁同步电机在各种复杂应用场景下找到最合适的控制策略,提升电机整体性能。
希望今天分享的这些能给研究永磁同步电机控制的小伙伴们一些新的启发,一起探索更优的控制方案!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐



 8
8 0
0- 0



 已为社区贡献15条内容
已为社区贡献15条内容

所有评论(0)