小车MPC模型预测控制下的车队队列控制:从三车到更多
小车MPC模型预测控制车队控制队列控制多车控制(3车队列控制+可扩更多车辆、可换车型) 软件使用:Matlab/Simulink2018b+Carsim2016.1(必须一样的版本+远程调试需格外200) 适用场景:采用模块化建模方法,搭建联合仿真模型,以三辆Carsim车辆作为整车平台,目前适用于直线工况。 包含模块:三个Carsim车辆输入输出模块,两个MPC模型预测队列控制器,前置跟随引线拓扑(BTPLF)车辆通信策略,参数显示模块。 (特别说明:由于车队联合仿真必须采用Carsim2016.1版本进行,因此进行车队控制都需要自己配置接口,本模型压缩包里面包含cpar导入后的数据库,可直接快速进行配置。 但如果运行不正常,是软件cpar导入问题。 解决方法:如果运行后,simulink显示三个Carsim车辆输入输出模块输入或者输入不匹配,这是由于软件问题,更换车型重新配置即可解决) 包含:Matlab/Simulink源码文件,详细建模说明文档,对应参考资料及相关文献,
嘿,各位搞控制的小伙伴们!今天来给大家分享一个超有趣的小车MPC模型预测控制下的车队控制项目,尤其是三车队列控制,而且它还具备可扩展更多车辆以及更换车型的超能力哦!
一、软件使用
这个项目用到的软件是Matlab/Simulink2018b和Carsim2016.1,注意啦,必须是这两个特定版本。要是想搞远程调试,还得额外花200大洋呢。为啥非得是这俩版本?咱做项目的都知道,不同版本间的兼容性问题能把人折磨疯,这俩版本搭配起来经过实践验证,能让项目顺顺当当跑起来。
二、适用场景
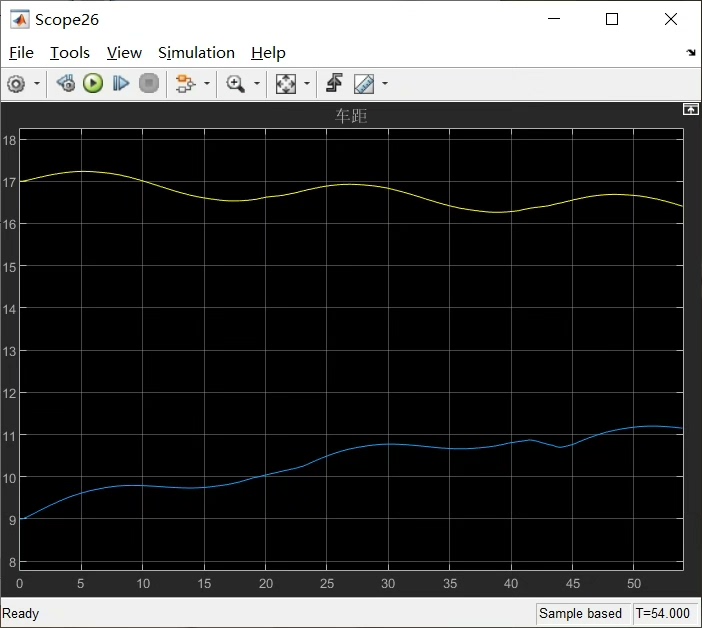
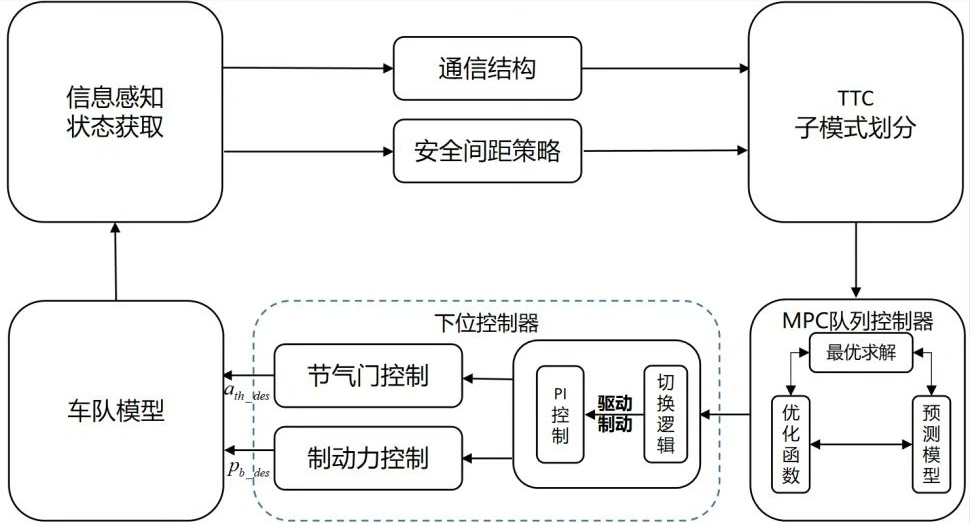
项目采用模块化建模方法搭建联合仿真模型。这里以三辆Carsim车辆作为整车平台,目前适用于直线工况。模块化建模就像搭积木,每个模块各司其职,后期要是想扩展或者修改功能,直接换对应的积木就行,方便得很。
三、包含模块
- 三个Carsim车辆输入输出模块:这几个模块就像是车辆和外界沟通的桥梁,负责接收控制信号并反馈车辆状态信息。比如在Matlab/Simulink里,你可能会看到类似这样的代码片段(这里只是示意):
% 假设定义了一个函数来处理车辆输入输出模块
function [output_signal] = car_input_output_module(input_signal)
% 这里可能会有一些数据处理和转换
output_signal = input_signal * 2; % 简单示意处理,实际要复杂得多
end在这个函数里,inputsignal 就是从外界传来的控制信号,函数对它进行处理后返回 outputsignal 作为车辆输出信息。实际应用中,会涉及到更多与车辆动力学相关的精确计算和信号转换。
- 两个MPC模型预测队列控制器:MPC可是这个项目的核心技术之一啦。它通过预测车辆未来的状态,提前规划控制策略,让车队保持稳定的队列行驶。看个简单的MPC控制律代码片段(同样是示意):
% 假设简单的MPC预测模型
function [control_signal] = mpc_controller(state, reference)
% 定义一些MPC参数
Q = [1 0; 0 1]; % 状态权重矩阵
R = 1; % 控制输入权重矩阵
% 预测未来几步的状态
for k = 1:prediction_horizon
state = state + A * state + B * control_signal; % A和B是系统矩阵,实际需精确推导
cost = cost + state' * Q * state + control_signal' * R * control_signal;
end
% 求解最优控制信号
[control_signal, ~] = fmincon(@(u)mpc_cost_function(u, state, reference, Q, R), initial_control_signal, [], [], [], [], [], [], []);
function cost = mpc_cost_function(u, state, reference, Q, R)
cost = 0;
% 预测未来状态并计算成本
for k = 1:prediction_horizon
state = state + A * state + B * u;
cost = cost + (state - reference)' * Q * (state - reference) + u' * R * u;
end
end
end这段代码大致展示了MPC控制器根据当前车辆状态 state 和期望参考 reference 计算出控制信号 control_signal 的过程,通过不断优化成本函数来寻找最优控制策略。
- 前置跟随引线拓扑(BTPLF)车辆通信策略:这是车队车辆之间传递信息的方式,保证车辆之间能协同工作。就好比大家在一个团队里,得互相通气才能把活干好。虽然代码实现细节比较复杂,但简单理解就是不同车辆之间按照这个策略来交换各自的位置、速度等关键信息。
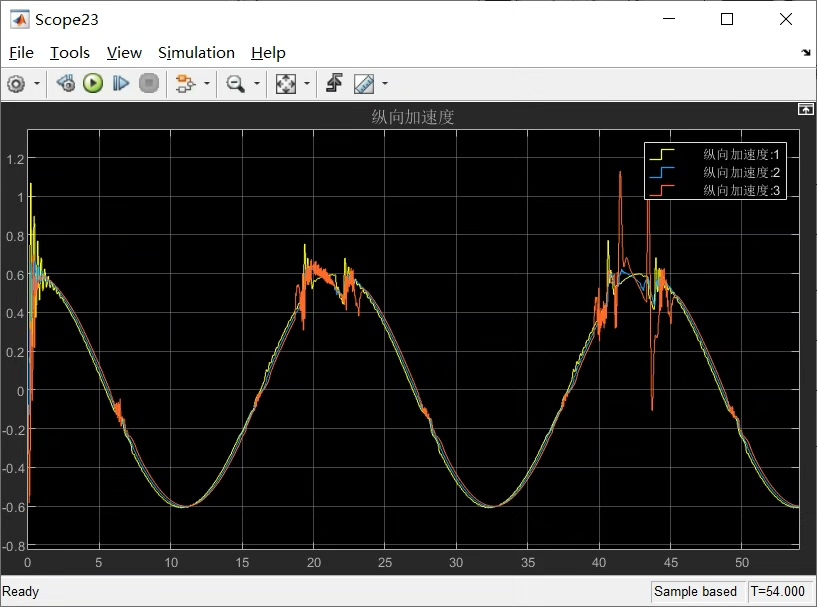
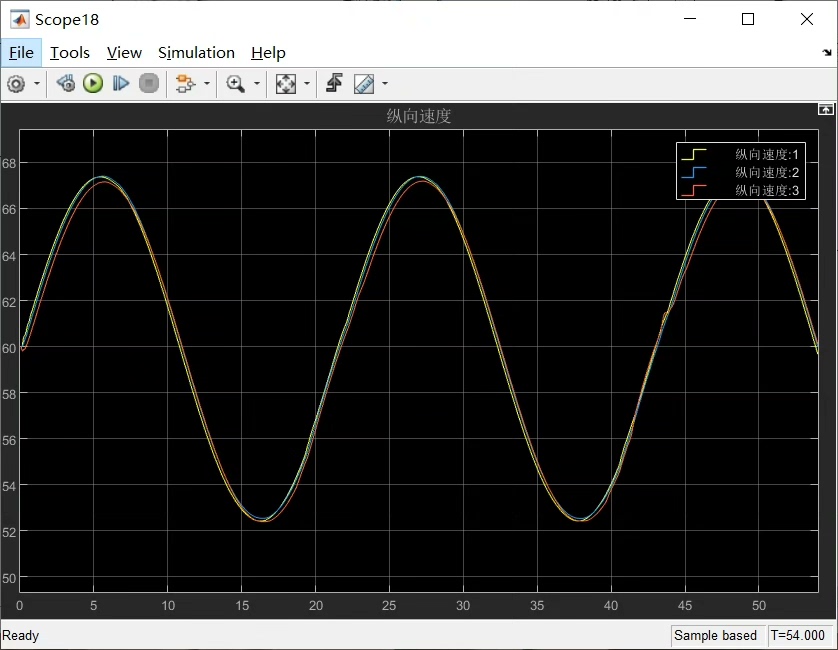
- 参数显示模块:这个模块方便我们直观看到模型里各种参数的变化情况,比如车辆速度、加速度、MPC控制器的一些关键参数等。在Matlab/Simulink里,可以通过简单的示波器模块来实现类似功能,只要把需要显示的信号连接到示波器就行,非常直观。
四、特别说明
因为车队联合仿真必须用Carsim2016.1版本,所以大家搞车队控制的时候都得自己配置接口。不过别担心,项目模型压缩包里面包含cpar导入后的数据库,能直接快速配置。要是运行不正常,大概率是软件cpar导入问题。要是运行后,simulink显示三个Carsim车辆输入输出模块输入或者输出不匹配,那是软件捣鬼,这时候换个车型重新配置就能解决啦。
五、项目包含内容
这个项目里可是应有尽有,Matlab/Simulink源码文件,详细建模说明文档,对应参考资料及相关文献全都有。源码文件就是项目的核心资产,大家可以直接拿来研究学习,看看到底代码是怎么实现这些复杂功能的。详细建模说明文档就像一本使用手册,一步一步告诉你模型是怎么搭建的,每个模块都有啥用。参考资料和相关文献则能让你站在巨人的肩膀上,深入了解这个领域的前沿知识和研究思路。
小车MPC模型预测控制车队控制队列控制多车控制(3车队列控制+可扩更多车辆、可换车型) 软件使用:Matlab/Simulink2018b+Carsim2016.1(必须一样的版本+远程调试需格外200) 适用场景:采用模块化建模方法,搭建联合仿真模型,以三辆Carsim车辆作为整车平台,目前适用于直线工况。 包含模块:三个Carsim车辆输入输出模块,两个MPC模型预测队列控制器,前置跟随引线拓扑(BTPLF)车辆通信策略,参数显示模块。 (特别说明:由于车队联合仿真必须采用Carsim2016.1版本进行,因此进行车队控制都需要自己配置接口,本模型压缩包里面包含cpar导入后的数据库,可直接快速进行配置。 但如果运行不正常,是软件cpar导入问题。 解决方法:如果运行后,simulink显示三个Carsim车辆输入输出模块输入或者输入不匹配,这是由于软件问题,更换车型重新配置即可解决) 包含:Matlab/Simulink源码文件,详细建模说明文档,对应参考资料及相关文献,
好啦,今天就分享到这儿,希望这个项目能给大家的研究和工作带来一些启发!


AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 10
10 0
0- 0



 已为社区贡献49条内容
已为社区贡献49条内容

所有评论(0)