基于DSP的电机控制方法探索之旅
基于DSP电机控制方法研究 本文详细讨论了无刷直流伺服电机,并推述星形接法的数学模型,并设计了数字控制无刷直流伺服电机总体方案,本文采用PID控制方法来控制电机,详细介绍了PID控制算法。 对DSP种类进行了简单的介绍,并选择以TMS320F2812为基准构建硬件平台了DSP供电电源设计,驱动电路的设计,PWM光电耦合隔离电路的设计,电流的采样电路的设计,对DSP进行保护电路的保护电路的设计等。 在CCS环境下,对程序进行编辑,编写PID控制算法对系统的初始化,编码器模块初始化,捕捉模块的初始化,SCI模块的初始化,以及对数字滤波进行编程。
在电机控制的领域中,无刷直流伺服电机因其诸多优势,成为众多项目的热门选择。今天咱就来唠唠基于DSP的无刷直流伺服电机控制方法。
一、无刷直流伺服电机与数学模型
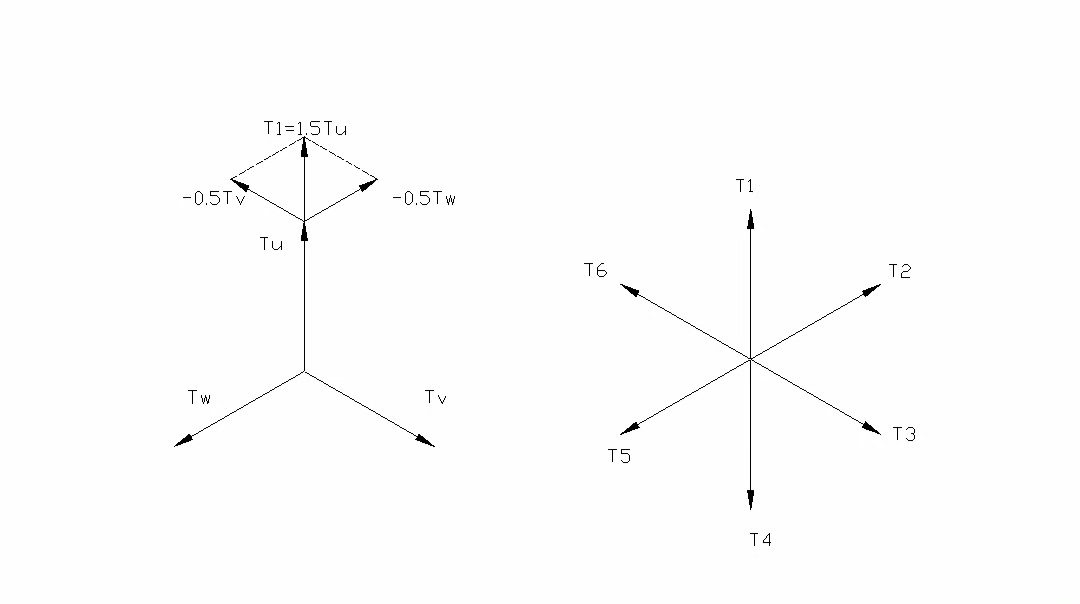
无刷直流伺服电机,相较于传统电机,有着效率高、寿命长、噪音低等优点。对于星形接法的无刷直流伺服电机,我们需要构建其数学模型来更好地理解和控制它。简单来说,通过基尔霍夫定律等电学知识,我们可以推导出它在不同状态下的电压、电流以及电磁转矩等之间的关系。比如在三相静止坐标系下,其电压方程可以表示为:
\[
\begin{bmatrix}
u_{a} \\
u_{b} \\
u_{c}
\end{bmatrix}
=
\begin{bmatrix}
R & 0 & 0 \\
0 & R & 0 \\
0 & 0 & R
\end{bmatrix}
\begin{bmatrix}
基于DSP电机控制方法研究 本文详细讨论了无刷直流伺服电机,并推述星形接法的数学模型,并设计了数字控制无刷直流伺服电机总体方案,本文采用PID控制方法来控制电机,详细介绍了PID控制算法。 对DSP种类进行了简单的介绍,并选择以TMS320F2812为基准构建硬件平台了DSP供电电源设计,驱动电路的设计,PWM光电耦合隔离电路的设计,电流的采样电路的设计,对DSP进行保护电路的保护电路的设计等。 在CCS环境下,对程序进行编辑,编写PID控制算法对系统的初始化,编码器模块初始化,捕捉模块的初始化,SCI模块的初始化,以及对数字滤波进行编程。
i_{a} \\
i_{b} \\
i_{c}
\end{bmatrix}
+
\frac{d}{dt}
\begin{bmatrix}
\psi_{a} \\
\psi_{b} \\
\psi_{c}
\end{bmatrix}
\]
这里 \( u{a}, u{b}, u{c} \) 是三相绕组的相电压, \( i{a}, i{b}, i{c} \) 是三相绕组的相电流, \( R \) 是绕组电阻, \( \psi{a}, \psi{b}, \psi_{c} \) 是三相绕组的磁链。这个数学模型是后续控制算法设计的基础,就像是大厦的基石,只有把它搞明白了,后续的控制策略才能稳稳落地。
二、数字控制总体方案与PID控制算法
咱采用PID控制方法来控制电机。PID控制算法可以说是电机控制领域的经典之作,它简单却又非常有效。PID控制的原理就是根据设定值与实际输出值之间的偏差,通过比例(P)、积分(I)、微分(D)三个环节的运算,来调整控制量,使系统的输出尽可能地接近设定值。
在代码实现上,用C语言简单示例如下:
// 定义PID结构体
typedef struct {
float SetPoint; // 设定值
float Kp, Ki, Kd; // 比例、积分、微分系数
float PTerm, ITerm, DTerm; // 比例、积分、微分项
float lastError; // 上一次的误差
float integral; // 积分项累计值
} PID;
// PID初始化函数
void PID_Init(PID *pid, float SetPoint, float Kp, float Ki, float Kd) {
pid->SetPoint = SetPoint;
pid->Kp = Kp;
pid->Ki = Ki;
pid->Kd = Kd;
pid->PTerm = 0.0;
pid->ITerm = 0.0;
pid->DTerm = 0.0;
pid->lastError = 0.0;
pid->integral = 0.0;
}
// PID计算函数
float PID_Compute(PID *pid, float feedback) {
float error = pid->SetPoint - feedback;
pid->PTerm = pid->Kp * error;
pid->integral += error;
pid->ITerm = pid->Ki * pid->integral;
pid->DTerm = pid->Kd * (error - pid->lastError);
pid->lastError = error;
return pid->PTerm + pid->ITerm + pid->DTerm;
}在这个代码里,首先定义了一个PID结构体,用来存放PID控制相关的参数。 PIDInit 函数用于初始化这些参数,而 PIDCompute 函数则根据当前的反馈值计算出控制量。通过不断调整 Kp, Ki, Kd 这三个系数,可以让电机的控制达到理想的效果。
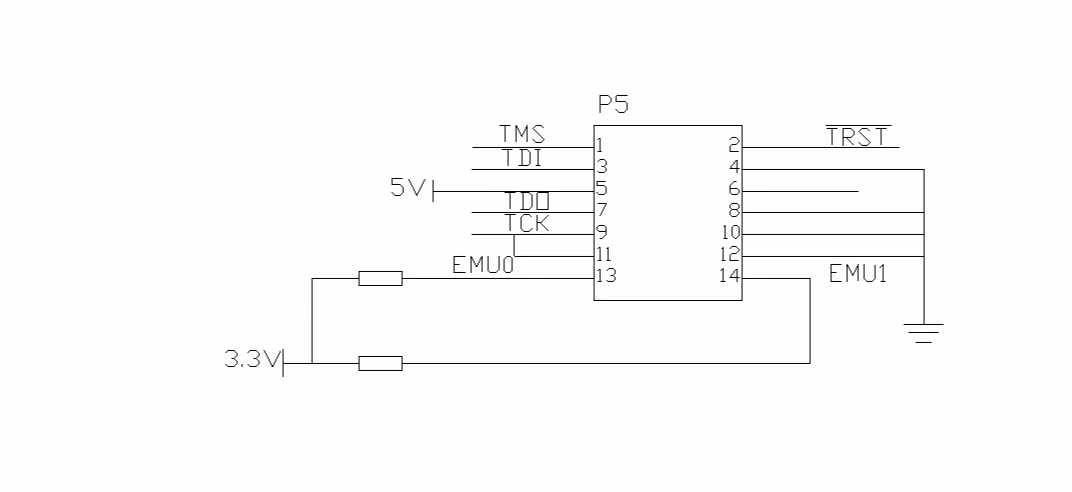
三、DSP硬件平台构建
DSP的种类繁多,不同的DSP适用于不同的场景。这里我们选择了TMS320F2812来构建硬件平台。为啥选它呢?它运算速度快、外设丰富,非常适合电机控制这种对实时性要求较高的场景。
1. 供电电源设计
为了保证DSP能够稳定工作,供电电源的设计至关重要。一般来说,TMS320F2812需要多种不同电压的电源,比如3.3V给I/O口供电,1.8V给内核供电等。我们可以使用线性稳压芯片或者开关电源芯片来实现这些不同电压的转换。例如,使用LM1117这种线性稳压芯片来将5V电压转换为3.3V,给DSP的I/O口供电。
2. 驱动电路设计
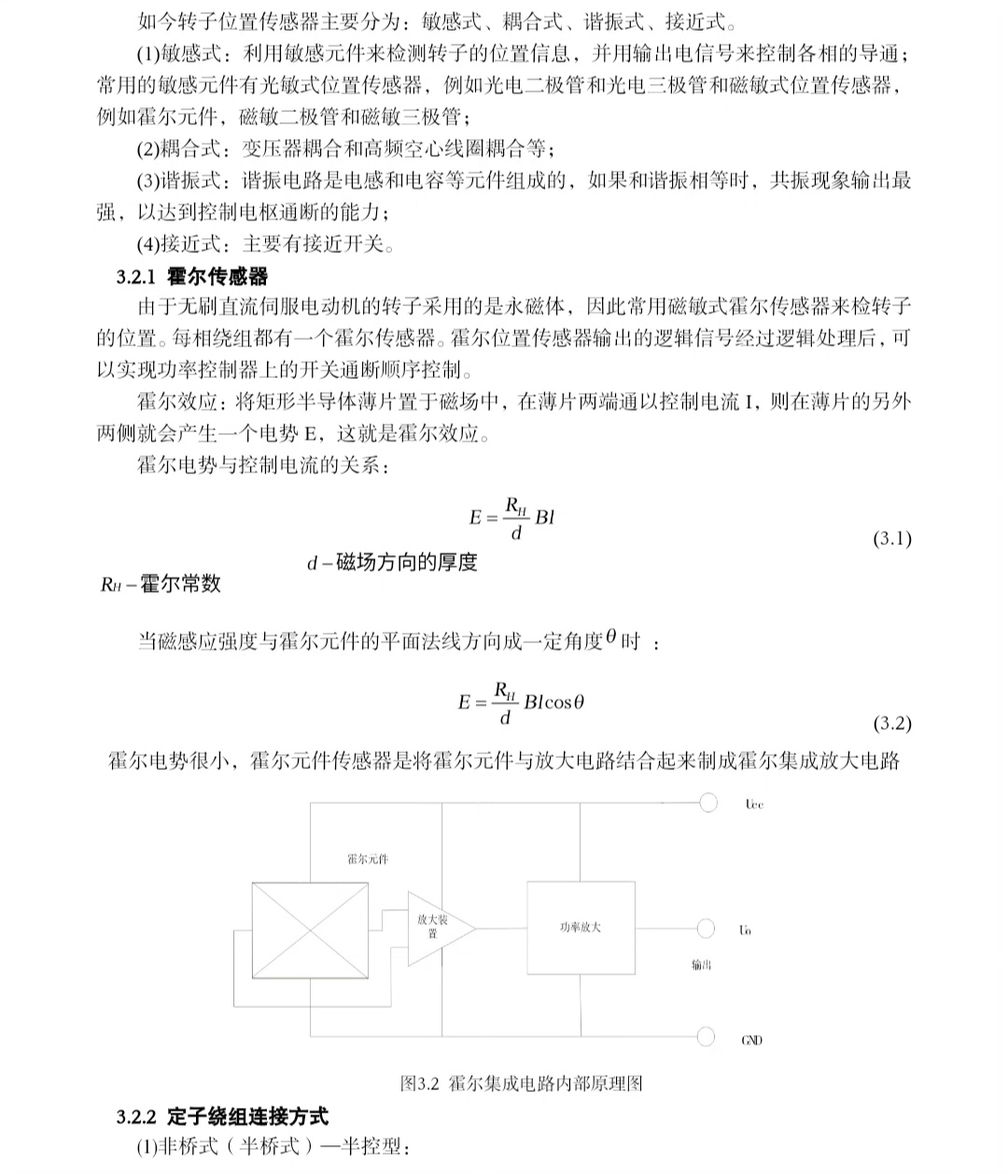
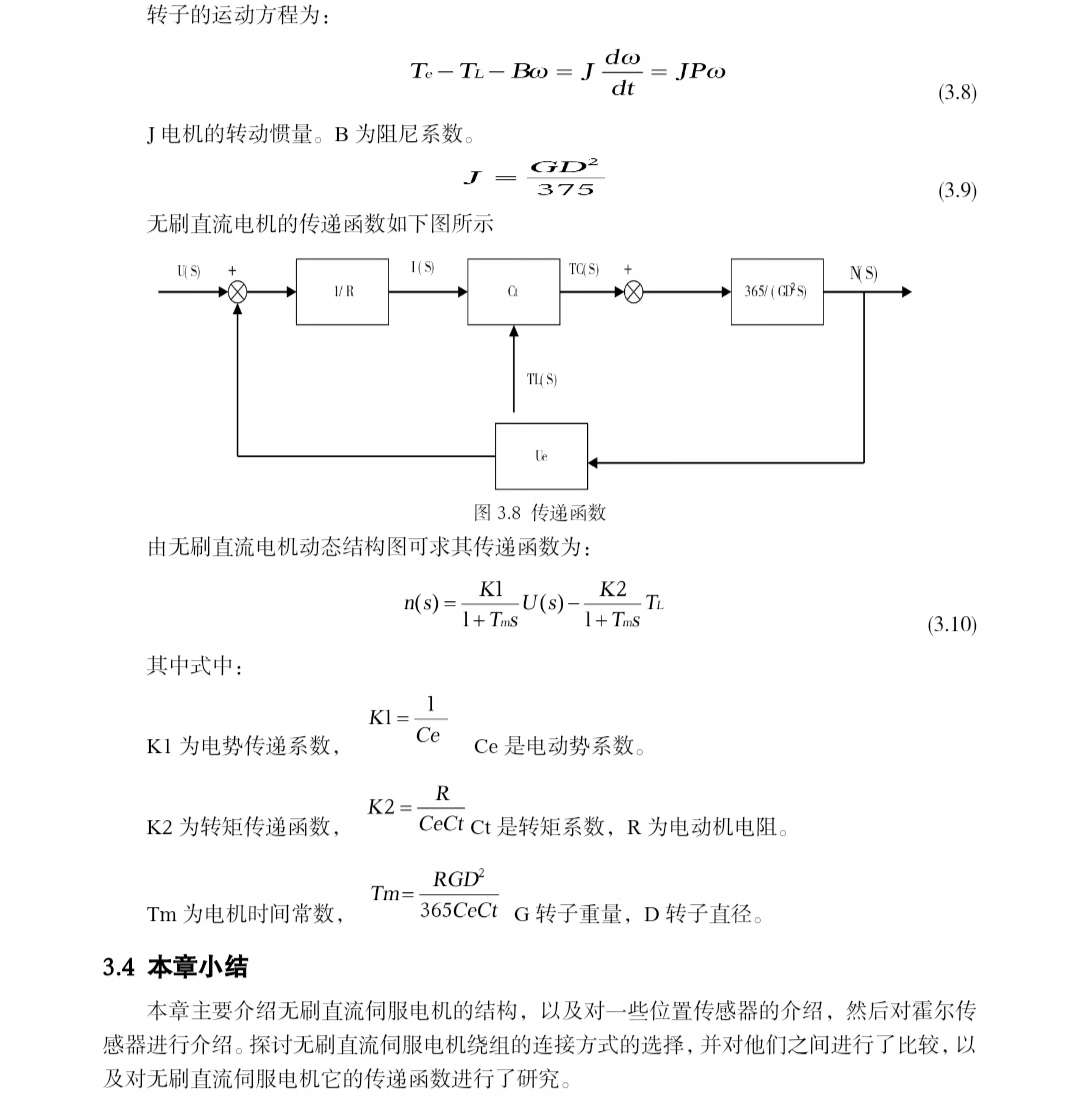
驱动电路要能够提供足够的电流来驱动电机。对于无刷直流伺服电机,常用的是三相全桥驱动电路。以IR2130芯片为例,它可以很好地实现三相全桥驱动功能。其内部集成了六路驱动电路,可以直接接收DSP输出的PWM信号,并将其放大后驱动功率MOSFET管,从而控制电机的三相绕组。
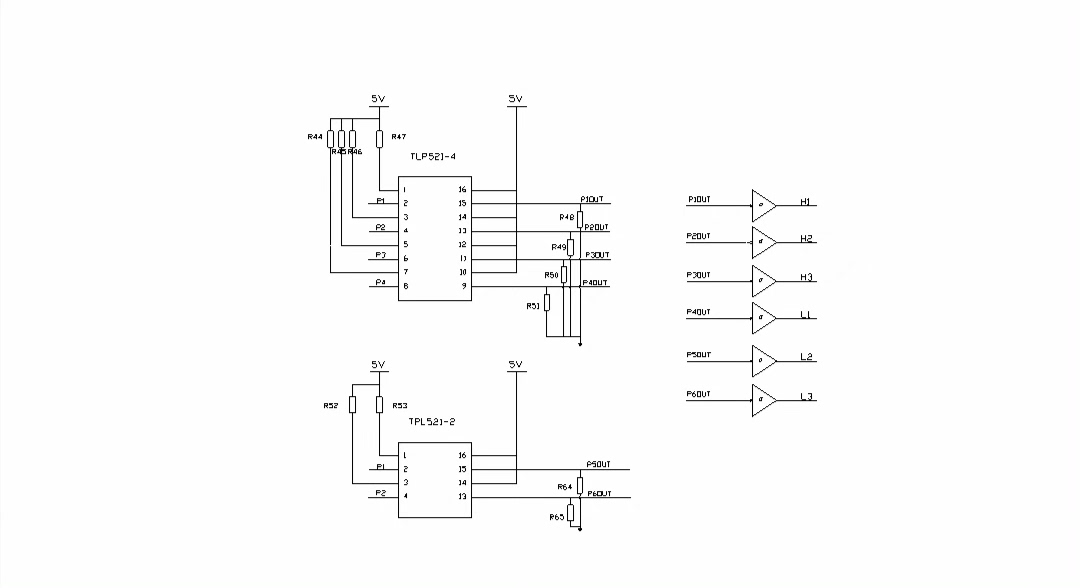
3. PWM光电耦合隔离电路设计
为了保证DSP与强电部分的电气隔离,提高系统的可靠性和安全性,我们需要设计PWM光电耦合隔离电路。比如使用高速光耦6N137,它可以将DSP输出的PWM信号进行隔离传输,使DSP不受电机侧强电干扰的影响。
4. 电流采样电路设计
电流采样是为了实时监测电机的运行电流,以便进行过流保护等操作。常用的方法是通过采样电阻采样,然后使用运算放大器进行信号放大。例如,采用INA128这种高精度仪表放大器,将采样电阻上的微弱电压信号放大到合适的范围,再输入到DSP的ADC模块进行采样。
5. 保护电路设计
保护电路就像是给DSP穿上了一层“铠甲”,防止它受到各种异常情况的伤害。比如过压保护、欠压保护、过流保护等。以过流保护为例,当采样到的电流超过设定阈值时,保护电路可以迅速切断电机的供电,避免电机和DSP受到损坏。
四、CCS环境下的程序编写
在CCS(Code Composer Studio)环境下,我们开始编写控制程序。
1. 系统初始化
系统初始化是整个程序的开端,就像是运动员比赛前的热身。在代码里,我们需要对DSP的一些基本寄存器进行配置,比如系统时钟的设置,让DSP能够以合适的频率运行。
// 初始化系统时钟
void InitSysCtrl(void) {
// 设置PLLCR寄存器,配置PLL倍频系数
EALLOW;
SysCtrlRegs.PLLCR.bit.DIV = 9; // 设置PLL倍频系数为10(DIV + 1)
EDIS;
// 等待PLL锁定
while (SysCtrlRegs.PLLSTS.bit.MCLKSTS!= 1);
// 设置HSPCLK时钟分频
SysCtrlRegs.HISPCP.all = 0x01; // HSPCLK = SYSCLKOUT / 2
}2. 编码器模块初始化
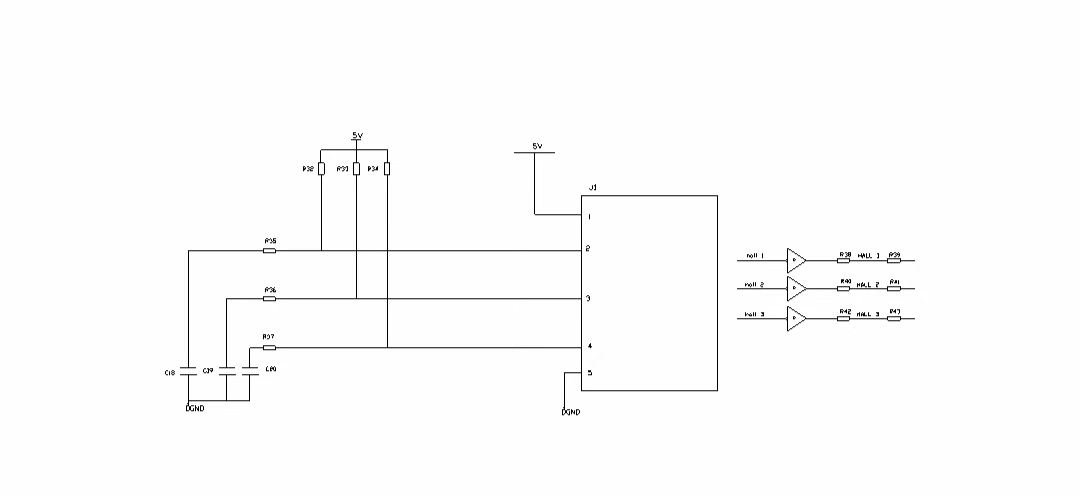
编码器可以实时反馈电机的位置和速度信息。我们需要对编码器模块进行初始化,以便能够正确读取这些信息。
// 初始化编码器模块
void InitEncoders(void) {
// 使能编码器相关GPIO口
EALLOW;
GpioCtrlRegs.GPAMUX2.bit.GPIO32 = 1; // GPIO32配置为QEP1A
GpioCtrlRegs.GPAMUX2.bit.GPIO33 = 1; // GPIO33配置为QEP1B
EDIS;
// 初始化QEP模块
Qep1Regs.QEPCTL.bit.QSRC = 0x02; // 正交编码模式
Qep1Regs.QEPCTL.bit.PCRM = 0x00; // 位置计数器复位模式
Qep1Regs.QEPCTL.bit.SWRST = 1; // 软件复位
Qep1Regs.QEPCTL.bit.SWRST = 0; // 清除软件复位
}3. 捕捉模块初始化
捕捉模块可以用于测量电机的转速等参数。
// 初始化捕捉模块
void InitCapiure(void) {
// 使能捕捉相关GPIO口
EALLOW;
GpioCtrlRegs.GPAMUX1.bit.GPIO22 = 1; // GPIO22配置为CAP1
EDIS;
// 初始化捕捉模块
Cap1Regs.CAPCONA.bit.CAP1EN = 1; // 使能捕捉通道1
Cap1Regs.CAPCONA.bit.CAP1POL = 0; // 上升沿捕捉
Cap1Regs.CAPCONA.bit.CAP1CLR = 1; // 清除捕捉计数器
Cap1Regs.TCAP1 = 0; // 初始化捕捉定时器
}4. SCI模块初始化
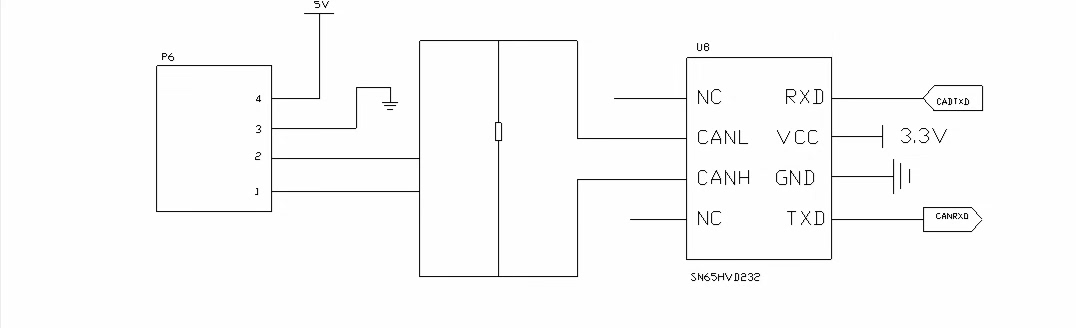
SCI模块用于与外部设备进行串口通信,方便我们调试和监控系统。
// 初始化SCI模块
void InitSci(void) {
// 使能SCI相关GPIO口
EALLOW;
GpioCtrlRegs.GPAMUX1.bit.GPIO16 = 1; // GPIO16配置为SCITXDA
GpioCtrlRegs.GPAMUX1.bit.GPIO17 = 1; // GPIO17配置为SCIRXDA
EDIS;
// 初始化SCI波特率
SciaRegs.SCICCR.all = 0x0007; // 8位数据位,1位停止位,无校验
SciaRegs.SCILBAUD = 103; // 9600波特率,SYSCLKOUT = 150MHz
SciaRegs.SCIHBAUD = 0;
SciaRegs.SCIFFTX.all = 0xC000; // 使能FIFO,发送FIFO复位
SciaRegs.SCIFFRX.all = 0x2000; // 使能FIFO,接收FIFO复位
SciaRegs.SCIFFCT.all = 0x00;
SciaRegs.SCICTL1.all = 0x0003; // 使能SCI接收和发送
}5. 数字滤波编程
为了去除采样信号中的噪声干扰,我们需要进行数字滤波。以简单的均值滤波为例:
// 均值滤波函数
float MeanFilter(float *data, int length) {
float sum = 0.0;
for (int i = 0; i < length; i++) {
sum += data[i];
}
return sum / length;
}通过上述一系列的操作,我们就完成了基于DSP的无刷直流伺服电机控制系统的设计与实现。从电机的数学模型推导,到控制算法设计,再到硬件平台构建和软件编程,每一步都紧密相连,共同构成了这个复杂而又有趣的系统。希望这篇博文能给对电机控制感兴趣的小伙伴们一些启发。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 18
18 0
0- 0



 已为社区贡献34条内容
已为社区贡献34条内容

所有评论(0)