7自由度车辆动力学模型与联合仿真验证之旅
7自由度车辆动力学模型与联合仿真验证 软件使用:Carsim2020.0+Matlab/Simulink2018b 适用场景:为了验证7自由度模型的正确性,与Carsim进行联合仿真验证,采用模块化建模方法,搭建了电机模型、参数计算、轮胎模型、7自由度动力学模型。 包含模块:电机模型模块1和2、参数计算模块、轮胎模型、7DOF模型、详细参考文献及说明文档。 包含:Matlab/Simulink源码文件,详细建模说明文档,对应参考资料及相关文献,
在车辆动力学研究领域,准确的模型构建与验证至关重要。今天就来和大家分享下基于 Carsim2020.0 与 Matlab/Simulink2018b 实现的 7 自由度车辆动力学模型联合仿真验证过程。
一、适用场景与目标
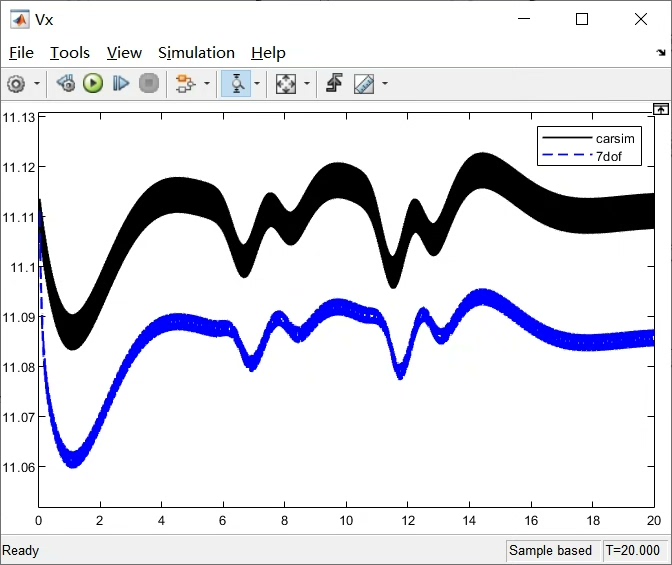
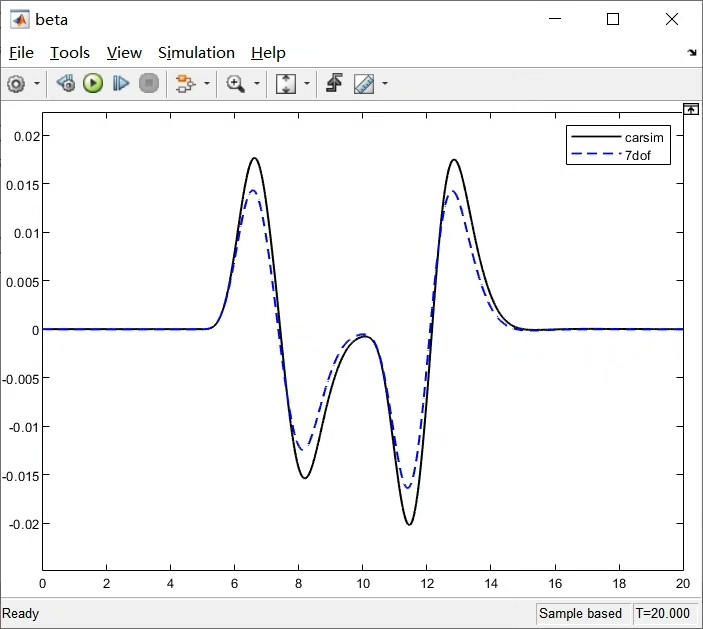
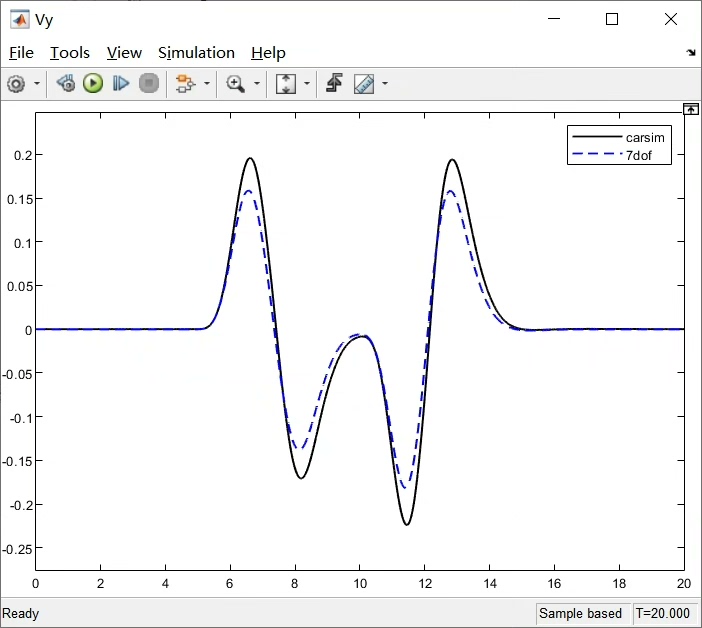
为了验证 7 自由度模型的正确性,我们采用联合仿真的方式。通过 Carsim 强大的车辆动力学模拟能力与 Matlab/Simulink 的灵活建模特性相结合,能够更全面、准确地评估模型性能。
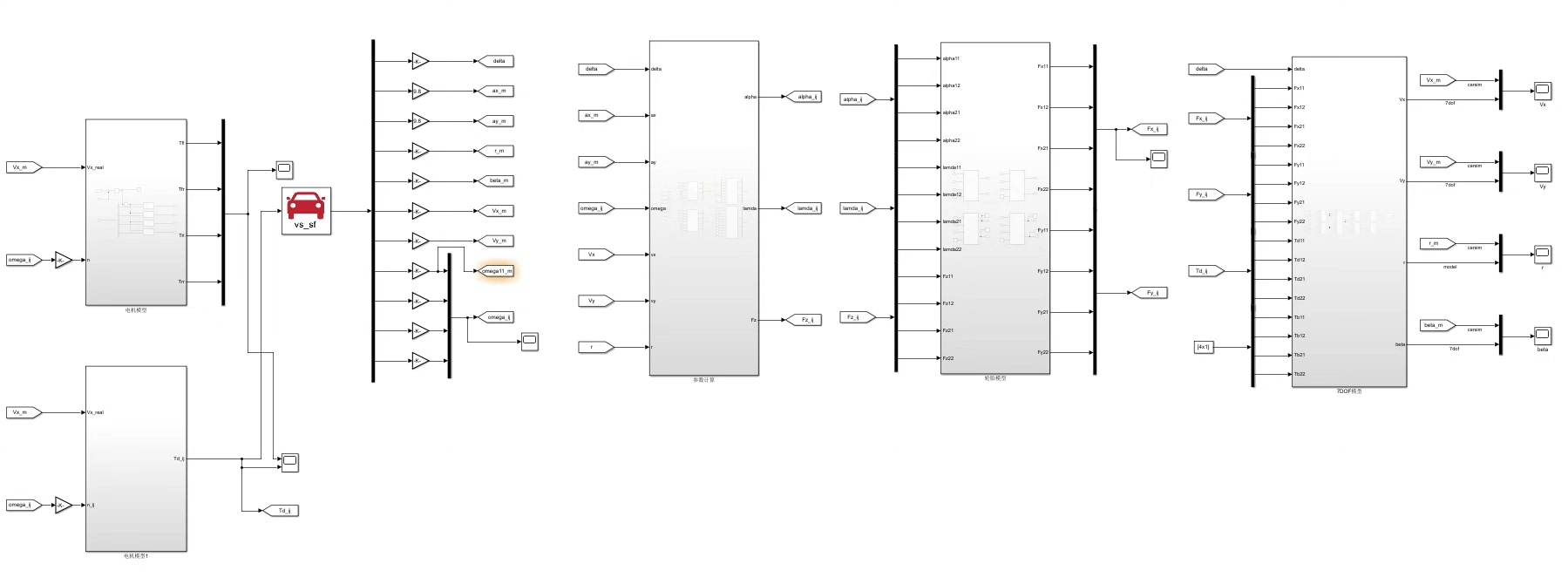
二、模块化建模
- 电机模型
- 模块 1:这部分主要负责模拟电机的基本特性,比如转速 - 转矩关系。以下是一段简单的 Matlab 代码示例,用于初步模拟电机转矩输出:
function torque = motor_torque(speed)
% 简单的线性关系,实际中更复杂
k = 0.1;
torque = k * speed;
end- 这段代码定义了一个函数
motor_torque,它根据输入的电机转速speed计算输出转矩torque。这里只是简单的线性关系,在实际应用中,电机模型需要考虑更多因素,如电机类型、磁滞、饱和等。 - 模块 2:可能会涉及到电机的控制逻辑,例如速度闭环控制。以简单的 PI 控制为例:
function new_speed = pi_control(target_speed, current_speed, Kp, Ki, dt)
error = target_speed - current_speed;
integral = integral + error * dt;
new_speed = current_speed + Kp * error + Ki * integral;
end- 上述代码实现了一个简单的 PI 控制器,通过目标速度
targetspeed和当前速度currentspeed的误差,结合比例系数Kp和积分系数Ki来调整速度。dt是时间步长,用于积分计算。
- 参数计算模块
此模块用于计算车辆行驶过程中的各种参数,如车辆质量、转动惯量等对动力学的影响。例如计算车辆等效质量:
function m_equivalent = calculate_equivalent_mass(m1, m2, r1, r2)
% 根据部件质量和力臂计算等效质量
m_equivalent = m1 + m2 * (r2 / r1)^2;
end这段代码根据输入的两个部件质量 m1、m2 以及它们对应的力臂 r1、r2 来计算等效质量 m_equivalent,这在分析车辆动力学响应时非常关键。
- 轮胎模型
轮胎模型是车辆动力学模型的重要组成部分,它决定了车辆与地面之间的力传递。在 Matlab/Simulink 中,可以通过复杂的公式来模拟轮胎的侧偏力、纵力等特性。以下是一个简单的魔术公式轮胎模型(简化版)示例:
function Fy = magic_formula_tire_model(alpha, B, C, D, E)
% alpha 为侧偏角
Fy = D * sin(C * atan(B * alpha - E * (B * alpha - atan(B * alpha))));
end该函数根据输入的侧偏角 alpha 以及魔术公式参数 B、C、D、E 计算轮胎侧向力 Fy。实际的轮胎模型会考虑更多因素,如路面条件、胎压等。
- 7DOF 模型
7 自由度模型考虑了车辆的纵向、侧向、垂向运动以及横摆、侧倾、俯仰运动,还有车轮的旋转运动。以下是简化的 7DOF 动力学方程在 Matlab 中的实现思路(仅示意):
function [dxdt] = seven_dof_model(t, x, params)
% x 为状态变量向量,包含位置、速度、角度等
% params 为模型参数,如质量、惯量等
% 提取状态变量
vx = x(1);
vy = x(2);
omega = x(3);
% 提取参数
m = params(1);
Iz = params(2);
% 计算纵向力 Fx 和侧向力 Fy(这里假设已有函数计算)
Fx = calculate_longitudinal_force(x, params);
Fy = calculate_lateral_force(x, params);
% 动力学方程
dxdt(1) = Fx / m - vy * omega;
dxdt(2) = Fy / m + vx * omega;
dxdt(3) = (Fy * lf - Fy * lr) / Iz;
end这段代码定义了一个函数 sevendofmodel,根据输入的时间 t、状态变量 x 和模型参数 params 计算状态变量的导数 dxdt,以此来描述车辆的动力学行为。
三、联合仿真实现
在搭建好各个模块后,就可以在 Matlab/Simulink 中进行联合仿真设置,将各个模块连接起来,并与 Carsim 进行数据交互。通过设置合适的仿真参数,如仿真时间、步长等,就可以运行联合仿真。
四、资源分享
本次研究包含了 Matlab/Simulink 源码文件,里面详细记录了各个模块的具体实现代码。同时还有详细建模说明文档,对每个模块的设计思路、参数意义等进行了阐述,方便大家理解和进一步改进。另外,对应参考资料及相关文献也一并提供,为深入研究车辆动力学模型提供了有力支持。
7自由度车辆动力学模型与联合仿真验证 软件使用:Carsim2020.0+Matlab/Simulink2018b 适用场景:为了验证7自由度模型的正确性,与Carsim进行联合仿真验证,采用模块化建模方法,搭建了电机模型、参数计算、轮胎模型、7自由度动力学模型。 包含模块:电机模型模块1和2、参数计算模块、轮胎模型、7DOF模型、详细参考文献及说明文档。 包含:Matlab/Simulink源码文件,详细建模说明文档,对应参考资料及相关文献,
通过这次联合仿真验证,不仅对 7 自由度车辆动力学模型有了更深入的理解,也掌握了 Carsim 与 Matlab/Simulink 联合仿真的实用技巧,希望对大家在车辆动力学研究方面有所帮助。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐
 2
2 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)