具身智能中的传感器技术5——具身智能概述4
·
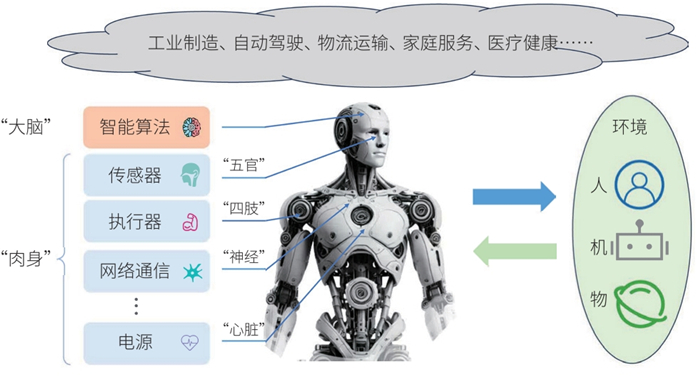
本文构建了具身智能系统的五层架构图谱:感知层(L1)通过多模态传感器采集环境数据;认知层(L2)利用大模型进行任务规划与决策;控制层(L3)实现运动解算与平衡控制;执行层(L4)精确驱动关节运动;骨骼层(L5)提供机械支撑。系统采用"数据上行-指令下行"的闭环流程,实现从环境感知到动作执行的完整闭环。其中感知层相当于生物的感觉器官,负责将物理信号转化为数字信息;认知层模拟大脑皮层进行高级推理;控制层对应小脑功能实现运动协调。这种层级架构实现了"慢系统"(认知)与"快系统"(控制)的协同工作,为具身智能的物理交互提供了完整技术框架。


具身智能系统架构全景图谱
| 层级 | 核心硬件载体 | 核心软件与算法 | 生物学类比 | 核心职责 (Function) |
|---|---|---|---|---|
| L1<br>感知层<br>(Perception) | 视觉: RGB-D 相机 (Realsense), 鱼眼相机, 激光雷达 (LiDAR)<br>触觉: 六维力传感器, 电子皮肤 (Tactile Array), 关节力矩传感器<br>听觉: 麦克风阵列<br>本体: IMU (惯性测量单元) | 视觉算法: CNN/ViT (物体识别), SLAM (建图), Occupancy Network (占用网络)<br>信号处理: 卡尔曼滤波 (传感器融合), 波束成形 (听声辨位)<br>状态估计: VIO (视觉惯性里程计) | 眼、耳、皮肤<br>及<br>内耳前庭 (平衡感) | “输入世界”<br>将物理世界的模拟信号(光、力、声)转化为计算机能理解的数字信号。 |
| L2<br>认知层<br>(Cognitive) | 算力中心:<br>NVIDIA Jetson Orin / Thor<br>工控机 (RTX 4090)<br>存储: 高速 SSD (向量数据库) | AI 大脑:<br>LLM/VLA (大语言/视觉动作模型)<br>任务规划 (Task Planning)<br>常识推理 (Common Sense)<br>记忆模块 (Memory Stream) | 大脑皮层<br>(额叶) | “思考决策”<br>理解模糊指令(“我渴了”),进行长程推理,决定“要做什么” (What to do)。 |
| L3<br>控制层<br>(Control) | 实时算力:<br>高性能 MCU (STM32H7, TI C2000)<br>FPGA (硬件加速)<br>通信: EtherCAT 主站 | 运动算法:<br>WBC (全身控制)<br>MPC (模型预测控制)<br>步态规划 (Gait Planning)<br>ZMP/CP 计算 (零力矩点/捕获点)<br>逆运动学 (IK) | 小脑<br>(平衡/协调)<br>及<br>脑干 | “运动解算”<br>将大脑的抽象指令(“去抓杯子”)转化为符合物理定律的关节轨迹,维持平衡 (How to move)。 |
| L4<br>执行层<br>(Execution) | 关节模组:<br>无框力矩电机, 谐波/行星减速器<br>空心杯电机 (灵巧手), 线性推杆 (大腿)<br>驱动器: 伺服驱动板 (GaN/MOSFET) | 伺服算法:<br>FOC (磁场定向控制)<br>PID 闭环控制 (三环)<br>阻抗/导纳控制 (Impedance Control)<br>安全急停逻辑 (Safety Logic) | 肌肉<br>及<br>脊髓反射 | “物理输出”<br>精确执行电流指令,输出力矩;实现“柔顺性”,碰到人时像弹簧一样卸力。 |
| L5<br>骨骼层<br>(Skeleton) | 结构材料:<br>航空铝合金, 碳纤维, PEEK (工程塑料)<br>热管理: 液冷管道, 散热鳍片<br>线束: 定制柔性排线 | 设计仿真:<br>拓扑优化 (Topology Optimization)<br>FEA (有限元分析)<br>URDF/MJCF (运动学描述文件) | 骨骼、韧带、关节<br>及<br>血管 | “支撑与保护”<br>提供机械强度,承载负载;散热系统如同血液循环带走热量。 |
核心逻辑解析
- 数据上行 (Sensors -> Brain):
L1 感知层收集数据 -> L3 控制层提取状态(如当前姿态) -> L2 认知层融合理解(看到前面有沟,知道要跨过去)。 - 指令下行 (Brain -> Muscles):
L2 认知层下发元动作(“跨步”) -> L3 控制层解算全身 40 个关节该怎么配合(左脚蹬地,右手摆动维持平衡) -> L4 执行层驱动电机转动。 - 快慢系统分离:
- L2 (大脑) 是慢系统,思考频率低(10Hz-30Hz),处理复杂逻辑。
- L3/L4 (小脑/肌肉) 是快系统,反应频率极高(1kHz-20kHz),保证物理世界的稳定。
下面就来介绍具身智能中的传感器技术

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 11
11 0
0- 0



 已为社区贡献32条内容
已为社区贡献32条内容

所有评论(0)