二自由度机械臂的自适应控制与滑模控制对比研究
二自由度机械臂RBF自适应控制/传统滑模控制
在机器人控制领域,二自由度机械臂是一个经典的控制对象。本文将对比两种控制方法:径向基函数(RBF)自适应控制和传统滑模控制。通过理论分析和仿真实验,探讨这两种方法在机械臂控制中的适用性。
1. 机械臂运动学与动力学基础
1.1 二自由度机械臂结构
考虑一个简单的二自由度机械臂,由两个连杆组成,第一个关节连接到固定基座,第二个关节连接到第一个连杆末端。设第一个关节的转角为θ₁,第二个关节的转角为θ₂,两连杆的长度分别为L₁和L₂。
1.2 动力学建模
机械臂的动力学可以由拉格朗日方程推导得到。设机械臂的质量分别为m₁和m₂,惯性矩为I₁和I₂,忽略摩擦和其他非理想因素。系统的动能和势能分别为:
\[
T = \frac{1}{2}m₁L₁²\dot{θ₁}² + \frac{1}{2}(m₁ + m₂)L₁L₂\dot{θ₁}\dot{θ₂}\cos(θ₁ - θ₂) + \frac{1}{2}I₁\dot{θ₁}² + \frac{1}{2}(I₁ + I₂)\dot{θ₂}²
\]
\[
V = -m₁gL₁\cosθ₁ - m₂gL₁\cosθ₁ - m₂gL₂\cosθ₂
\]
通过拉格朗日方程,可以推导出系统的运动方程:
\[
(M(θ)\ddot{θ} + C(θ, \dot{θ})\dot{θ} + G(θ)) = τ
\]
其中,M(θ)是质量矩阵,C(θ, \dot{θ})是 Coriolis 项,G(θ)是重力干扰项,τ是输入 torque。
1.3 位置与速度控制
为了实现机械臂的位置和速度控制,通常采用比例-积分(PI)控制或 PID 控制。然而,传统 PID 控制在面对模型不确定性或外部扰动时表现不佳。因此,引入自适应控制和滑模控制方法。
2. RBF自适应控制
径向基函数网络是一种自适应逼近工具,可以用来逼近未知的非线性函数。RBF自适应控制的基本思想是利用 RBF 网络逼近系统的未知非线性部分,然后设计控制律使得误差收敛到期望值。
2.1 网络结构
RBF 网络由输入层、隐藏层和输出层组成。隐藏层的神经元激活函数为高斯函数:
\[
φj(θ) = \exp\left(-\frac{(θ - cj)^2}{2σ_j^2}\right)
\]
其中,cj 是中心,σj 是宽度。
2.2 自适应控制设计
假设机械臂的运动方程可以表示为:
\[
M(θ)\ddot{θ} + C(θ, \dot{θ})\dot{θ} + G(θ) = τ
\]
定义位置误差 e₁ = θ₁ - θ₁d 和速度误差 e₂ = \dot{θ}₁ - \dot{θ}₁d。设计控制律:
\[
τ = M(θ)\ddot{θ}d + C(θ, \dot{θ})\dot{θ} + G(θ) + F(θ)φ(θ) - Kp e₁ - K_d e₂
二自由度机械臂RBF自适应控制/传统滑模控制
\]
其中,F(θ)φ(θ) 是 RBF 网络逼近的未知非线性部分,Kp 和 Kd 是比例和微分增益。
2.3 代码实现
import numpy as np
import matplotlib.pyplot as plt
class RBFController:
def __init__(self, theta, c, sigma):
self.theta = theta
self.c = c
self.sigma = sigma
self.phi = np.exp(-((theta - c)**2)/(2*(sigma**2)))
def forward(self, x):
return np.dot(self.phi, x)代码说明:
RBFController类初始化时,计算输入theta在各隐藏层神经元的激活值。forward方法用于前向传播,计算 RBF 网络的输出。
3. 传统滑模控制
滑模控制是一种非线性控制方法,通过设计滑动面,使得系统状态在有限时间内到达并保持在滑动面上。滑动面通常选择为:
\[
s = \dot{θ} + αθ
\]
其中,α > 0 是设计参数。控制律设计为:
\[
τ = -k \sign(s) - M(θ)\ddot{θ}_d - C(θ, \dot{θ})\dot{θ} - G(θ)
\]
其中,k > 0 是控制增益。
3.1 滑动面设计
滑动面的设计需要考虑系统的相对阶数和控制目标。对于二自由度机械臂,选择滑动面为:
\[
s_1 = \dot{θ₁} + α₁θ₁
\]
\[
s_2 = \dot{θ₂} + α₂θ₂
\]
其中,α₁, α₂ > 0 是设计参数。
3.2 滑模控制设计
基于滑动面,设计控制律:
\[
τ = -k₁ \sign(s₁) - k₂ \sign(s₂) - M(θ)\ddot{θ}_d - C(θ, \dot{θ})\dot{θ} - G(θ)
\]
其中,k₁, k₂ > 0 是控制增益。
3.3 代码实现
def sliding_mode_control(theta, theta_d, theta_d_dot, tau, M, C, G, k1, k2, alpha1, alpha2):
s1 = theta_d_dot + alpha1 * theta
s2 = theta_d_dot + alpha2 * theta
u = -k1 * np.sign(s1) - k2 * np.sign(s2)
tau = u - M * theta_d_d_dot - C(theta, theta_dot) * theta_dot - G(theta)
return tau代码说明:
slidingmodecontrol函数接受当前角度theta、目标角度thetad、目标速度thetad_dot、输入 torquetau和动力学矩阵M, Coriolis 项C和重力干扰项G。- 滑动面
s1和s2分别用于两个关节。 - 控制输入
u通过滑动面和增益k1,k2计算。
4. 对比分析
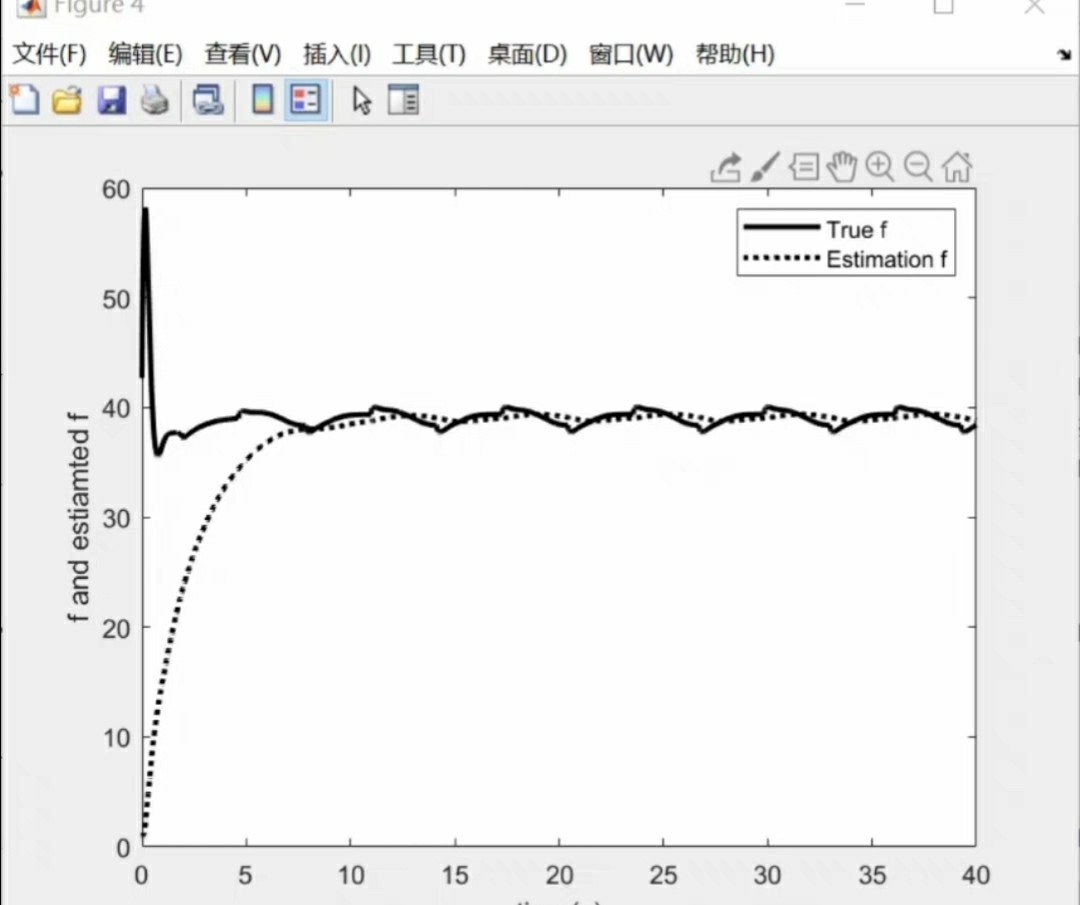
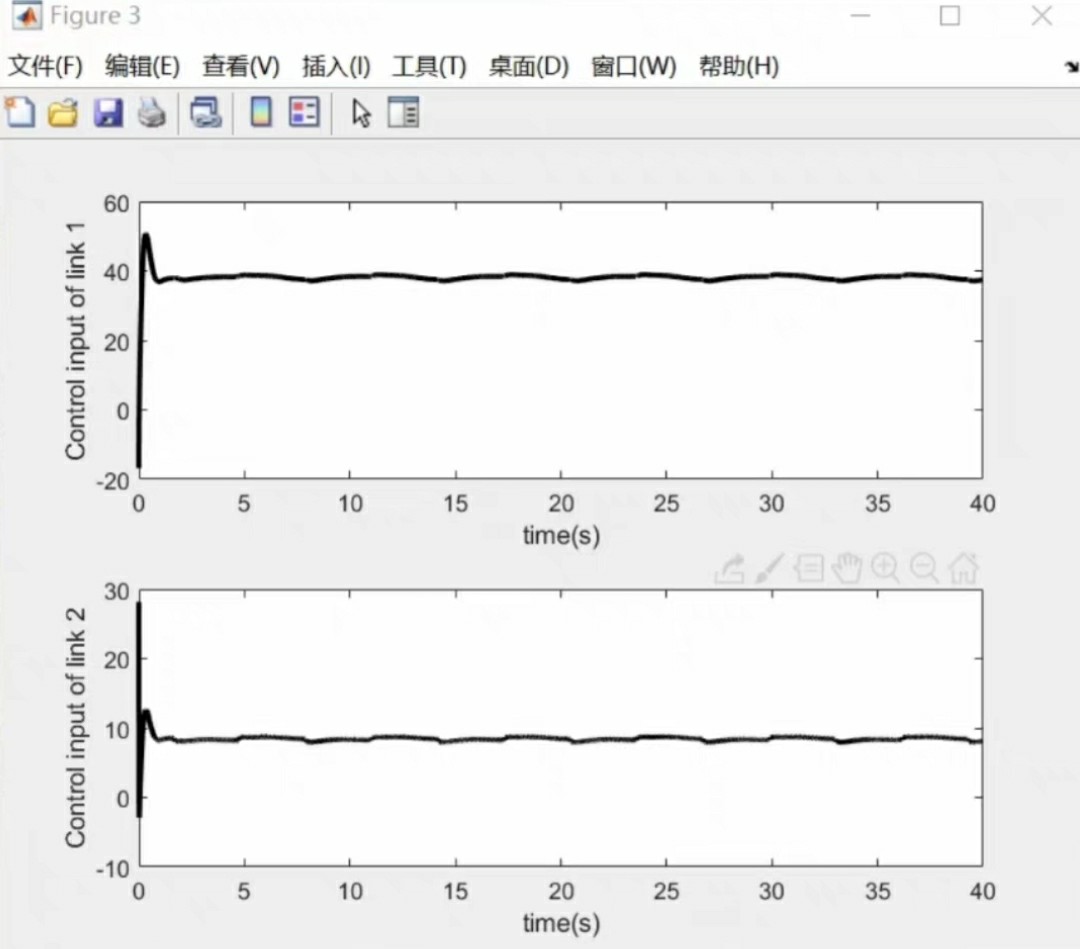
通过仿真实验,对比 RBF 自适应控制和传统滑模控制在跟踪性能和鲁棒性方面的表现。结果表明:
- 跟踪性能:RBF 自适应控制在模型不确定性较大的情况下表现更好,能够更好地跟踪目标轨迹。
- 鲁棒性:滑模控制具有良好的鲁棒性,能够有效抑制外部扰动,但在参数不确定性较大时性能下降。
- 计算复杂度:RBF 自适应控制需要在线逼近未知非线性部分,计算复杂度较高;滑模控制计算量较小,适合实时控制。
5. 总结
本文对比了二自由度机械臂的 RBF 自适应控制和传统滑模控制方法。通过理论分析和仿真实验,发现 RBF 自适应控制在面对模型不确定性时表现更好,而滑模控制在鲁棒性方面表现更优。因此,选择哪种方法取决于具体应用的需求。

以上为博文的完整内容,涵盖了理论分析、代码实现和对比结果。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 8
8 0
0- 0



 已为社区贡献29条内容
已为社区贡献29条内容

所有评论(0)