混合动力汽车能量管理策略之动态规划算法实现
动态规划算法,混合动力汽车能量管理策略 编程平台matlab,.m文件 包括多个调用函数和主函数。 单独设置了整车数据的函数,方便修改替换数据。 基于动态规划的混合动力汽车能量管理策略。 相比于单独的动态规划代码更加规范化,流程化。 便于替换数据和理解。 后期可以导入simulink中,应用于后向仿真模型。 1.本程序可作为初学者和论文中策略对比和提取最优规则。
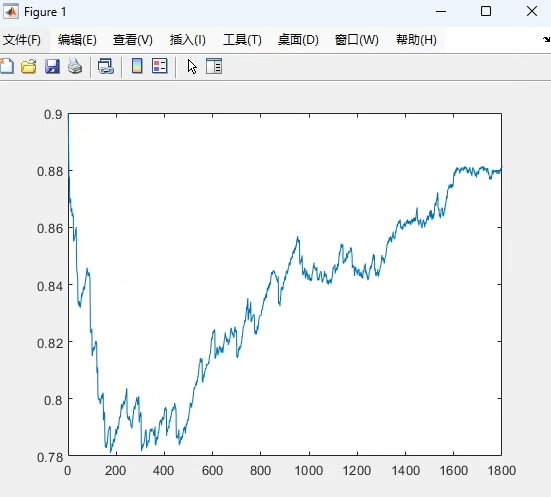
在混合动力汽车领域,能量管理策略对于提升车辆性能和能源效率至关重要。今天,咱们就来聊聊基于动态规划算法的混合动力汽车能量管理策略,并用 Matlab 来实现它。
整体框架
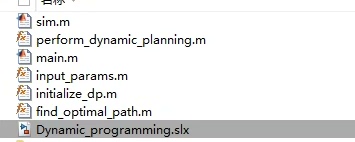
我们采用 Matlab 的.m 文件编写代码,整个程序包含多个调用函数和一个主函数。这种结构相比于单独的动态规划代码更加规范化、流程化,不仅便于我们理解,而且非常方便替换数据。
整车数据函数
为了方便修改和替换数据,我们单独设置了一个整车数据的函数。假设我们有一个 vehicle_data.m 文件,代码如下:
function data = vehicle_data()
data.mass = 1500; % 车辆质量,单位:kg
data.engine_power = 80e3; % 发动机功率,单位:W
data.motor_power = 50e3; % 电机功率,单位:W
data.battery_capacity = 10; % 电池容量,单位:kWh
% 这里还可以继续添加更多关于车辆的参数
end这个函数的作用很简单,就是将整车相关的数据整合在一起。在其他函数或主函数中,如果需要使用这些数据,直接调用这个函数获取就可以。比如在主函数中:
data = vehicle_data();
mass = data.mass;这样就轻松获取到了车辆的质量数据,要是之后车辆的质量等参数有变化,只需要在 vehicle_data.m 文件中修改相应的值,而不用在整个代码中到处找相关参数进行修改,是不是很方便呢?
动态规划算法实现
动态规划算法部分是整个能量管理策略的核心。假设我们有一个 dpenergymanagement.m 函数文件,这是一个简化后的示例代码框架:
function [optimal_control, cost] = dp_energy_management(data, driving_cycle)
% 定义状态变量、控制变量等
num_states = length(state_space);
num_controls = length(control_space);
cost_matrix = zeros(num_states, num_controls);
optimal_control_matrix = zeros(num_states, num_controls);
% 遍历所有阶段(这里简化假设阶段就是行驶循环的时间步)
for t = 1:length(driving_cycle)
for i = 1:num_states
for j = 1:num_controls
% 根据当前状态、控制变量和行驶循环计算下一状态
next_state = calculate_next_state(state_space(i), control_space(j), driving_cycle(t), data);
% 计算代价
cost_matrix(i, j) = calculate_cost(state_space(i), control_space(j), driving_cycle(t), data);
% 记录最优控制
optimal_control_matrix(i, j) = j;
end
end
end
% 回溯找到最优控制序列
[optimal_control, cost] = backtrack(cost_matrix, optimal_control_matrix, initial_state);
end在这段代码里,dpenergymanagement 函数接收车辆数据 data 和行驶循环 drivingcycle 作为输入。首先定义了状态变量、控制变量相关的参数,初始化了代价矩阵 costmatrix 和最优控制矩阵 optimalcontrolmatrix。然后通过嵌套循环遍历行驶循环的每个时间步、每个状态和每个控制变量,计算下一状态和代价,并记录最优控制。最后通过回溯函数 backtrack 找到最优控制序列。
动态规划算法,混合动力汽车能量管理策略 编程平台matlab,.m文件 包括多个调用函数和主函数。 单独设置了整车数据的函数,方便修改替换数据。 基于动态规划的混合动力汽车能量管理策略。 相比于单独的动态规划代码更加规范化,流程化。 便于替换数据和理解。 后期可以导入simulink中,应用于后向仿真模型。 1.本程序可作为初学者和论文中策略对比和提取最优规则。
像 calculatenextstate 和 calculate_cost 这些函数,我们还需要根据实际的物理模型和算法逻辑去实现,这里就不详细展开了,主要是给大家展示一个动态规划算法在能量管理策略中的大致实现框架。
主函数
主函数就像是整个程序的总指挥,它调用上述的函数来完成整个能量管理策略的计算。假设主函数文件名为 main.m,代码如下:
% 主函数
data = vehicle_data();
driving_cycle = load_driving_cycle(); % 假设这个函数加载行驶循环数据
[optimal_control, cost] = dp_energy_management(data, driving_cycle);
% 输出或进一步处理最优控制序列和代价
disp('最优控制序列:');
disp(optimal_control);
disp(['总代价:', num2str(cost)]);在主函数中,首先调用 vehicledata 获取车辆数据,再调用 loaddrivingcycle 加载行驶循环数据(当然,loaddrivingcycle 函数需要我们自己去实现,这里只是假设它能正确加载数据)。然后调用 dpenergy_management 函数得到最优控制序列和代价,最后输出这些结果。
后期应用
这个基于动态规划的混合动力汽车能量管理策略程序,除了可以作为初学者学习动态规划算法在汽车领域应用的示例,以及在论文中用于策略对比和提取最优规则外,后期还可以导入 Simulink 中,应用于后向仿真模型。这样就能在更接近实际车辆运行的环境中,对我们设计的能量管理策略进行验证和优化。
希望通过这篇博文,能让大家对基于动态规划算法的混合动力汽车能量管理策略及其 Matlab 实现有更清晰的了解。大家要是有什么问题或想法,欢迎在评论区交流哦!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 0
0 0
0- 0



 已为社区贡献39条内容
已为社区贡献39条内容

所有评论(0)