感应异步电机无传感器矢量控制:代码与模型的探索
电机控制器代码及模型 感应异步电机的无传感器矢量控制,完整C代码和仿真模型 代码已经成功移植TMS320F28335和STM32F107中。 有文档和教程
最近在研究感应异步电机的无传感器矢量控制,这可是电机控制领域相当热门且实用的技术。今天就来跟大家分享下与之相关的代码和模型。
一、感应异步电机无传感器矢量控制的魅力
在传统的电机控制中,常常需要各种传感器来获取电机的位置、速度等信息,这不仅增加了成本,还可能降低系统的可靠性和抗干扰能力。而无传感器矢量控制技术,能够通过对电机电气量的分析计算,间接估计出电机的转速和位置,实现高性能的电机控制,简直是一举多得。
二、完整C代码剖析
先来看一段关键的C代码片段(这里仅展示部分核心逻辑,实际完整代码需结合整个项目需求):
// 定义一些电机参数
float R_s = 1.0;
float R_r = 1.0;
float L_sigma = 0.1;
float L_m = 1.0;
float J = 0.01;
float B = 0.01;
// 定义状态变量
float theta_e = 0.0;
float omega_e = 0.0;
float i_ds = 0.0;
float i_qs = 0.0;
// 控制算法函数
void vector_control(float v_ds_ref, float v_qs_ref) {
// 计算定子电流参考值
float i_ds_ref = calculate_id_ref();
float i_qs_ref = calculate_iq_ref();
// 电流PI调节器
float v_ds = pi_controller(i_ds_ref, i_ds);
float v_qs = pi_controller(i_qs_ref, i_qs);
// 坐标变换
float v_alpha = v_ds * cos(theta_e) - v_qs * sin(theta_e);
float v_beta = v_ds * sin(theta_e) + v_qs * cos(theta_e);
// 这里省略SVPWM调制部分代码,它负责将电压指令转换为实际的PWM信号驱动电机
}代码分析
- 参数定义部分:这里定义了电机的一些关键参数,像定子电阻
Rs、转子电阻Rr等。这些参数对于准确模拟和控制电机的运行至关重要,不同的电机型号其参数值会有所不同。 - 状态变量:
thetae表示电角度,omegae表示电角速度,ids和iqs分别是定子电流在d轴和q轴上的分量。这些变量实时反映了电机的运行状态,是控制算法的重要依据。 - 控制算法函数:
- 首先计算定子电流参考值,calculateidref()和calculateiqref()函数会根据具体的控制策略来确定参考电流值,这一步是实现矢量控制的关键,它将电机的转矩和磁通解耦控制。
- 接着使用PI调节器来调节实际电流跟踪参考电流,picontroller()函数根据输入的参考值和实际值的偏差来计算输出电压,以减小电流偏差。
- 坐标变换部分将旋转坐标系下的电压指令转换到静止坐标系,得到valpha和v_beta,后续通过SVPWM调制就可以产生驱动电机的PWM信号。
三、仿真模型的构建
仿真模型对于验证控制算法的有效性和性能非常重要。在搭建感应异步电机无传感器矢量控制的仿真模型时,通常会用到一些专业的仿真软件,比如MATLAB/Simulink。
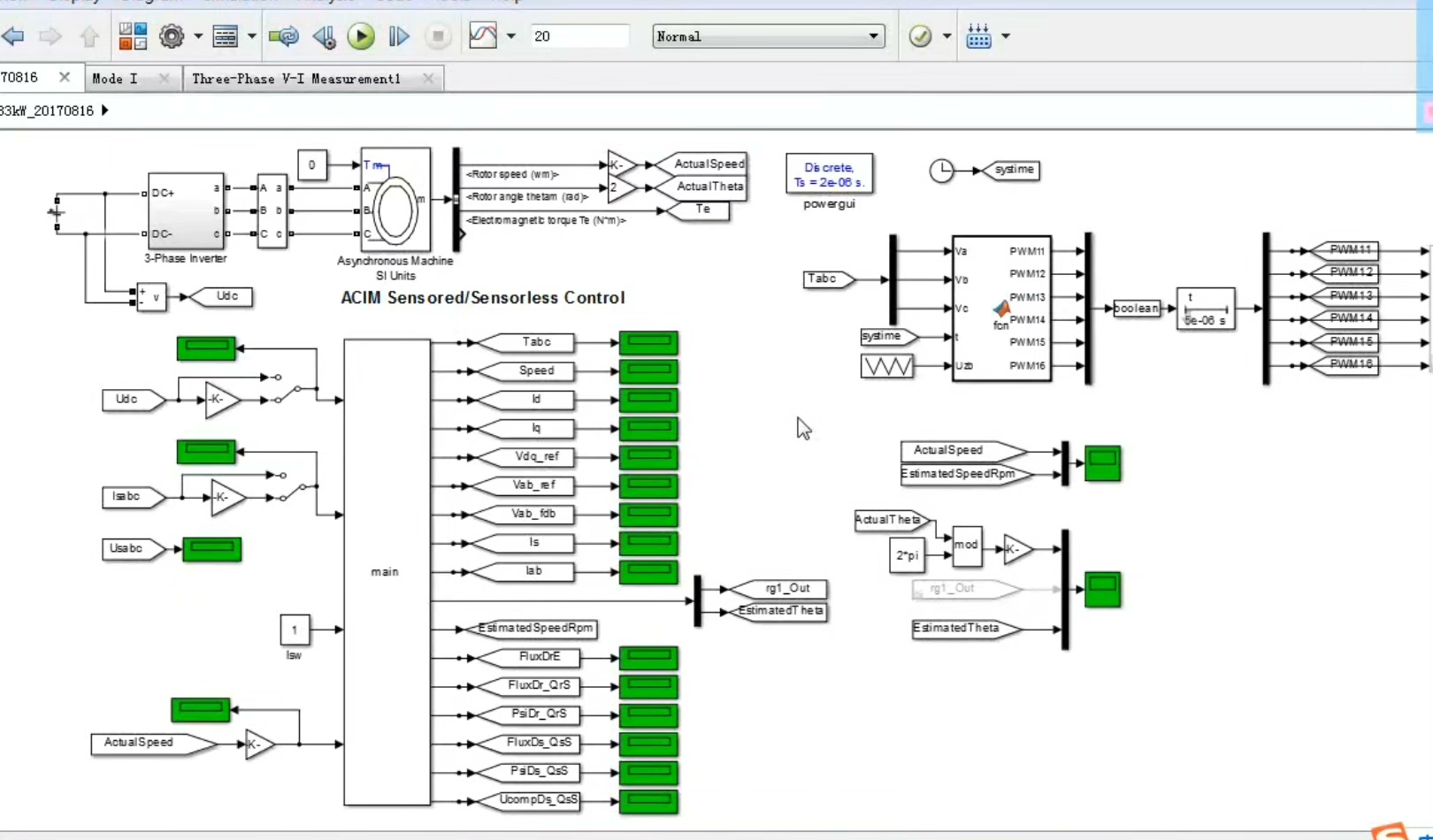
在Simulink中,可以搭建如下模块结构:
- 电机模型模块:根据电机的数学模型搭建,输入电压信号,输出电机的转速、转矩等物理量。
- 控制算法模块:将前面提到的C代码逻辑用Simulink模块实现,包括坐标变换、PI调节等部分。
- 观测器模块:用于估计电机的转速和位置,这是无传感器控制的核心部分,通过对电机电气量的观测和计算来获取转速和位置信息。
通过仿真模型,可以在实际硬件实现之前,对控制算法进行调试和优化,大大节省了开发时间和成本。
四、成功移植到不同平台
这个代码已经成功移植到了TMS320F28335和STM32F107平台上。这两个平台都是在电机控制领域应用较为广泛的微控制器。
电机控制器代码及模型 感应异步电机的无传感器矢量控制,完整C代码和仿真模型 代码已经成功移植TMS320F28335和STM32F107中。 有文档和教程

以STM32F107为例,移植过程中需要注意硬件资源的配置,比如定时器用于产生PWM信号,ADC用于采集电流等电气量。同时,要根据STM32的寄存器和库函数来调整代码中的底层驱动部分。
// STM32F10x系列初始化定时器用于PWM输出
TIM_TimeBaseStructure.TIM_Period = period_value;
TIM_TimeBaseStructure.TIM_Prescaler = prescaler_value;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIMx, &TIM_TimeBaseStructure);
// 初始化PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = pulse_value;
TIM_OC1Init(TIMx, &TIM_OCInitStructure);代码分析
这段代码是STM32初始化定时器用于PWM输出的部分。TIMTimeBaseStructure 结构体配置了定时器的周期、预分频器等参数,这些参数决定了PWM信号的频率。TIMOCInitStructure 结构体则配置了PWM的模式和输出状态,通过设置 TIM_Pulse 值可以调整PWM的占空比,从而实现对电机电压的控制。
五、文档和教程助力学习
除了代码和模型,还有配套的文档和教程。文档详细介绍了感应异步电机无传感器矢量控制的原理、算法推导,以及代码的详细注释和说明,对于深入理解整个项目非常有帮助。教程则一步一步地指导如何搭建仿真模型、移植代码到硬件平台,无论是新手入门还是有经验的工程师参考,都十分实用。

希望今天的分享能让大家对感应异步电机的无传感器矢量控制的代码和模型有更深入的了解,欢迎一起交流探讨。

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐

 10
10 0
0- 0



 已为社区贡献5条内容
已为社区贡献5条内容

所有评论(0)