探索 Simulink 整车控制器 VCU 应用层模型的奇妙世界
Simulink整车控制器vcu应用层模型,实车在用的,支持仿真和生成 文件分类明确,每个普通功能和核心功能建有单独的库,存放在文件夹里。 有相应的表格,描述了信号的意思。
最近在研究实车正在使用的 Simulink 整车控制器 VCU 应用层模型,真的发现了不少有趣的东西,迫不及待要和大家分享一番。
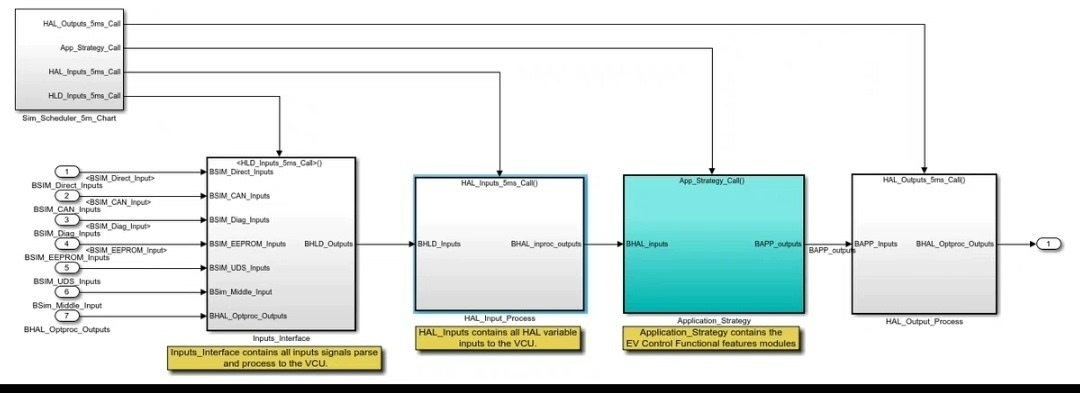
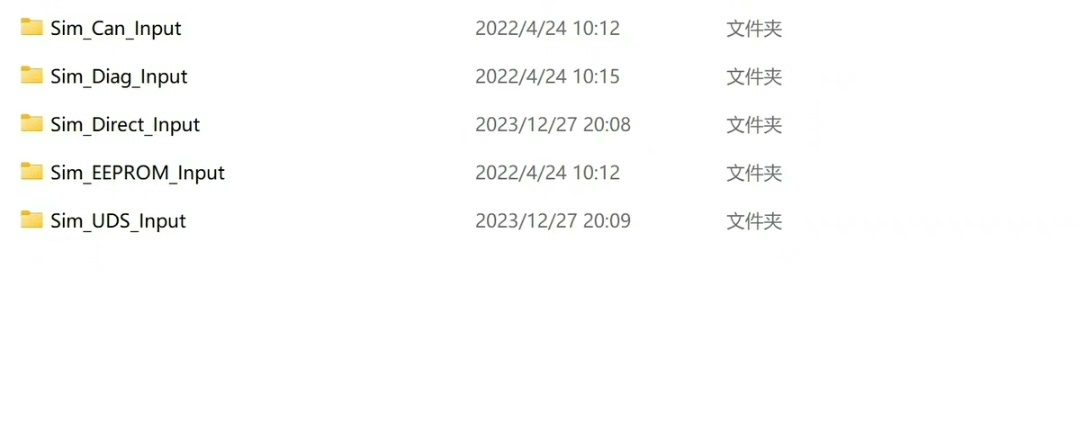
文件分类与功能库
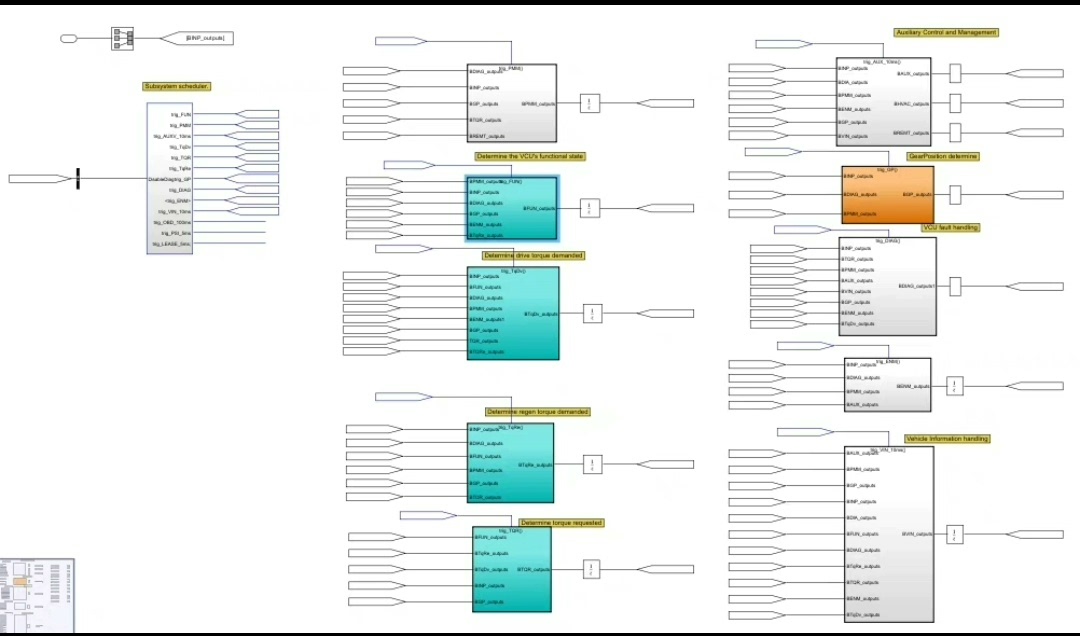
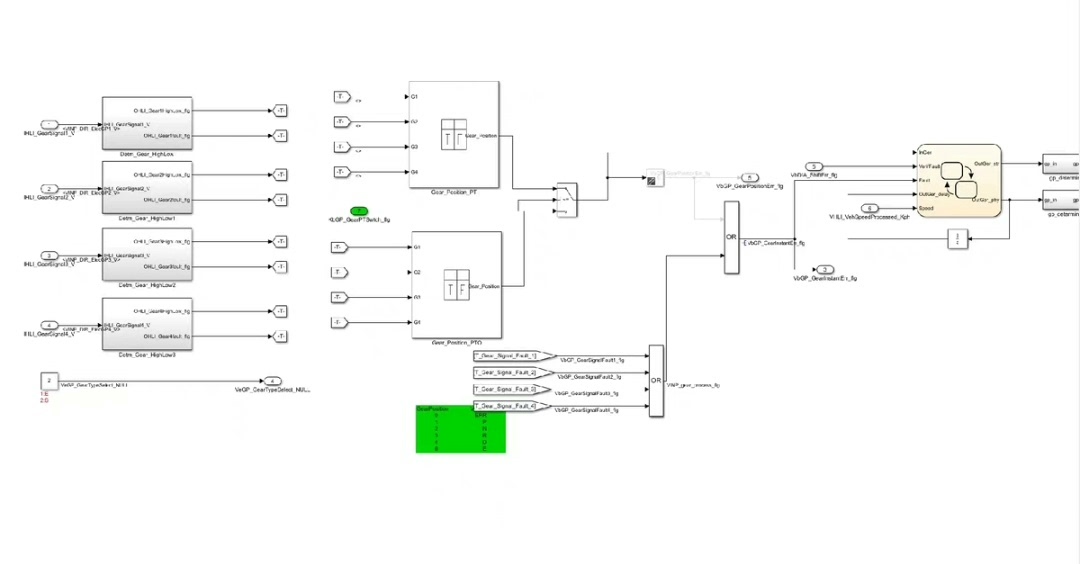
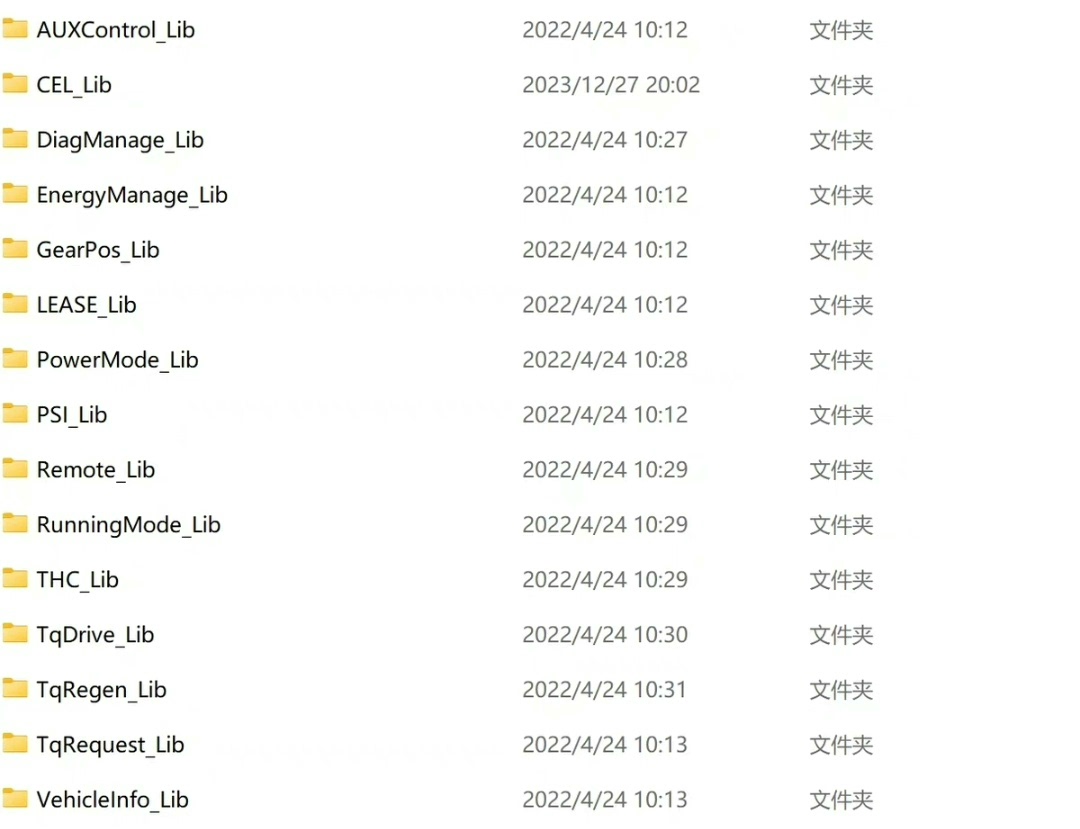
这个模型在文件管理方面堪称典范,分类明确得让人赏心悦目。每个普通功能和核心功能都建有单独的库,并且整整齐齐地存放在对应的文件夹里。这就好比是一个精心整理的图书馆,每个书架都对应特定的知识类别,找起书来一目了然。
比如说,我们有一个控制车辆巡航功能的库文件 CruiseControlLib,它被放在 VehicleControlFunctions/Cruise 文件夹下。在这个库文件里,代码结构也非常清晰。以一段简单的巡航速度设定代码为例:
function setCruiseSpeed(speed)
% 检查速度值是否在合理范围内
if speed < 30 || speed > 120
error('巡航速度必须在30到120km/h之间');
end
global cruiseSpeed;
cruiseSpeed = speed;
disp(['巡航速度已设置为 ', num2str(speed),'km/h']);
end这段代码首先对传入的速度值进行合理性检查,如果不在规定的 30 到 120km/h 之间,就抛出错误。之后,它通过 global 关键字声明并设置全局变量 cruiseSpeed,最后在命令窗口打印出速度设置成功的信息。这种模块化的设计,不仅方便维护,而且复用性极强。如果在其他地方也需要设置巡航速度,直接调用这个函数就行啦。
信号描述表格的重要性
这里还有相应的表格,用来描述信号的意思,这可太关键了。就像航海中的地图,它为我们理解模型中的各种信号提供了指引。
Simulink整车控制器vcu应用层模型,实车在用的,支持仿真和生成 文件分类明确,每个普通功能和核心功能建有单独的库,存放在文件夹里。 有相应的表格,描述了信号的意思。
假设我们有一个信号叫 EngineRPM,在表格中它会详细说明:
| 信号名称 | 含义 | 单位 | 取值范围 |
|---|---|---|---|
| EngineRPM | 发动机每分钟转数 | RPM(转/分钟) | 0 - 8000 |
有了这样的表格,无论是在进行模型开发、调试还是后续的维护工作,都能快速准确地理解每个信号代表什么,避免了很多因为误解信号含义而产生的错误。
支持仿真与生成
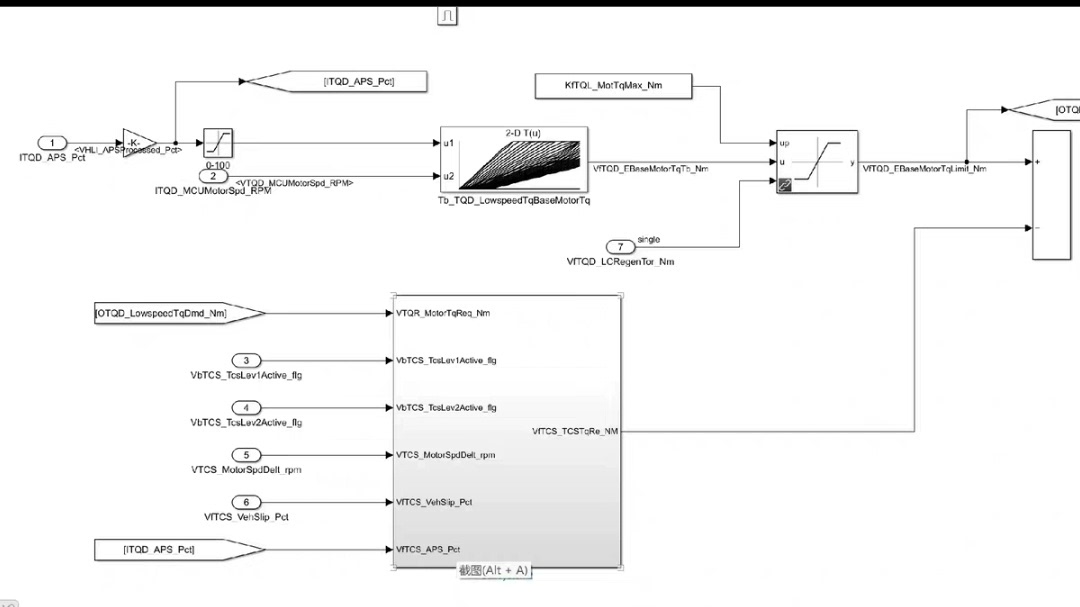
这个 VCU 应用层模型还支持仿真和生成,这简直是开发人员的福音。通过仿真,我们可以在虚拟环境中模拟各种车辆行驶场景,提前发现模型中潜在的问题。比如说,模拟车辆在不同坡度的道路上行驶,观察发动机扭矩信号和车速信号的变化,以此来优化控制算法。
在进行代码生成时,它能将 Simulink 模型转换为高效的 C 代码,方便集成到实际的车辆电子控制单元(ECU)中。以生成代码的配置为例,在 Simulink 中,我们只需简单几步操作:打开模型配置参数对话框,在 “Code Generation” 选项卡中,选择目标语言为 C,设置好输出目录等参数,点击生成按钮,就能得到高质量的 C 代码啦。
// 生成的部分 C 代码示例
#include "rtwtypes.h"
#include "multiword_types.h"
#include "CruiseControl.h"
void CruiseControl_Init(void)
{
// 初始化相关变量
cruiseSpeed = 0;
}
void CruiseControl(void)
{
// 根据设定逻辑更新巡航速度
if (newSpeedAvailable) {
cruiseSpeed = newSpeed;
newSpeedAvailable = 0;
}
}这段生成的 C 代码实现了巡航控制功能的初始化和运行逻辑,简洁明了,能够直接嵌入到 ECU 的软件框架中。
总之,这个 Simulink 整车控制器 VCU 应用层模型无论是在文件管理、信号描述,还是仿真与代码生成方面,都有着出色的表现,为车辆控制系统的开发提供了坚实可靠的基础。希望我的分享能让大家对它有更深入的了解!

AtomGit 是由开放原子开源基金会联合 CSDN 等生态伙伴共同推出的新一代开源与人工智能协作平台。平台坚持“开放、中立、公益”的理念,把代码托管、模型共享、数据集托管、智能体开发体验和算力服务整合在一起,为开发者提供从开发、训练到部署的一站式体验。
更多推荐


 9
9 0
0- 0



 已为社区贡献21条内容
已为社区贡献21条内容

所有评论(0)